
Merancang, Mengembangkan, dan Mengulangi Proyek Anda - C++
Jawablah pertanyaan berikut di buku catatan teknik Anda saat Anda merancang proyek Anda.
-
Proyek apa yang ingin Anda lakukan dengan robot tersebut? Jelaskan dengan rinci.
-
Langkah apa yang akan Anda ikuti untuk menguji proyek tersebut? Jelaskan dengan rinci.
-
Bagaimana robot Anda dapat diprogram untuk menyelesaikan tugas dengan akurasi paling tinggi? Jelaskan dengan rinci.
 Kotak Alat Guru
-
Jawaban
Kotak Alat Guru
-
Jawaban
-
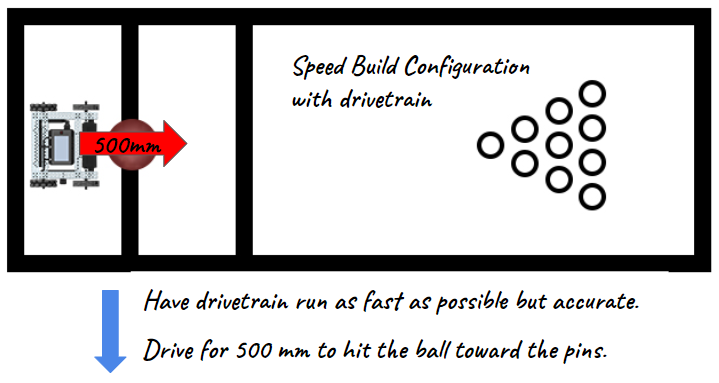
Jawabannya kemungkinan besar mencakup mengemudi dengan cepat dan cukup jauh untuk meraih dan mendorong bola ke depan dengan kekuatan optimal sambil tetap menjaga akurasi. Minta siswa untuk menjelaskan bagaimana tabrakan robot dengan bola dan bola dengan pin menjadi faktor dalam rencana mereka. Hubungkan kembali ini dengan Hukum Kedua Newton dan siswa kemungkinan ingin mengatur robot agar melaju pada kecepatan 100%. Namun perlu digarisbawahi bahwa meskipun kecepatan tertinggi robot akan menghasilkan percepatan terbesar pada bola dan selanjutnya pada pin setelah tumbukan, kecepatan tertinggi robot dapat membahayakan keakuratan dalam tantangan ini. Mereka perlu menemukan kompromi antara keduanya dan mereka dapat menggunakan tabel baru di bawah ini atau tabel sebelumnya untuk mengumpulkan data dan memutuskan kecepatan terbaik untuk tantangan ini.
-
Jawabannya harus mencakup penulisan pseudocode, pengukuran jarak yang perlu ditempuh robot, konversi pengukuran tersebut ke milimeter, dan menjalankan proyek. Pastikan siswa memahami cara mengubah sentimeter atau meter menjadi milimeter untuk pemrograman.
-
Mengubah sentimeter ke milimeter memerlukan penambahan angka nol di akhir bilangan bulat. Misalnya, 10 cm sama dengan 100 mm.
-
Mengonversi meter ke milimeter memerlukan penambahan tiga angka nol di akhir bilangan bulat. Misalnya, 1m sama dengan 1000mm.
-
-
Jawabannya dapat mencakup pengukuran jarak yang tepat antara lokasi awal robot dengan posisi awal bola, lalu menggunakan pengukuran tersebut untuk memprogram jarak yang tepat yang perlu ditempuh robot. Penting juga untuk menemukan kecepatan optimal saat berkendara sambil tetap menjaga akurasi.
Ikuti langkah-langkah di bawah ini saat Anda membuat proyek Anda:
- Rencanakan jalur yang ingin Anda program agar diikuti robot Anda menggunakan gambar dan pseudocode (Google / .docx / .pdf).
- Gunakan pseudocode yang Anda buat untuk mengembangkan proyek Anda.
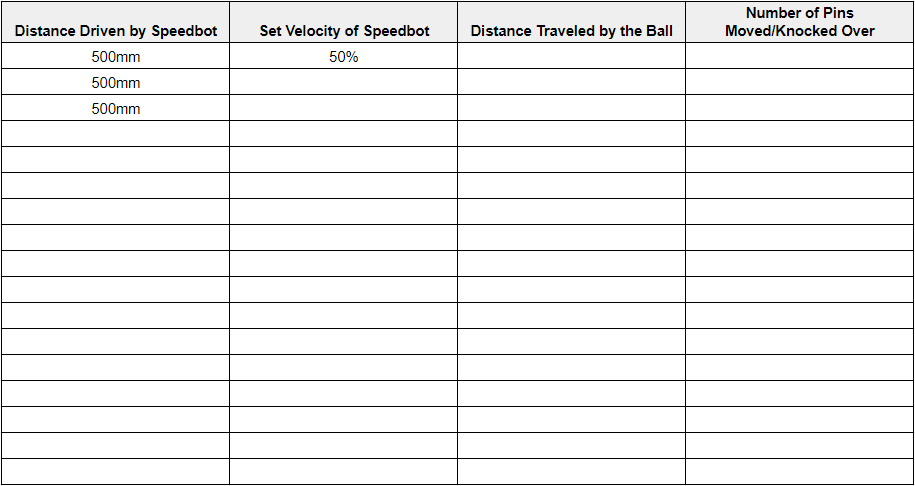
- Uji proyek Anda dalam C++ sesering mungkin dan ulangi menggunakan apa yang Anda pelajari dari pengujian Anda. Setelah setiap percobaan, catat seberapa jauh robot melaju, berapa kecepatan yang ditetapkan, seberapa jauh bola melaju, dan berapa banyak pin yang dipindahkan. Berikut adalah tabel yang diperbarui untuk pengumpulan dan analisis data.
 Tips Guru
Tips Guru
- Tabel untuk Strike Challenge dapat diunduh dan dicetak dari sini (Google/ .pdf), atau siswa dapat membuat ulang tabel tersebut di buku catatan teknik mereka.
-
Minta siswa untuk menggunakan penggaris untuk mengukur jalur yang mereka usulkan. Kemudian, mintalah siswa mengevaluasi pseudocode mereka sebelum melanjutkan ke langkah kedua.
-
Instruksikan siswa untuk menggunakan pseudocode sebagai komentar dalam proyek mereka untuk membantu pengorganisasian, alur, dan pemecahan masalah. Minta siswa untuk mengevaluasi pseudocode mereka sebelum menambahkan instruksi ke proyek mereka. Anda dapat mengunduh rubrik pseudocode di sini (Google / .docx / .pdf). Lihat contoh di bawah ini sebagai referensi saat Anda membantu siswa menyelesaikan tantangan:
int main() { // Menginisialisasi Konfigurasi Robot. JANGAN DIHAPUS! vexcodeInit(); // Mulai kode proyek // Atur kecepatan dorong ke lebih dari 50% untuk mendorong bola lebih jauh Drivetrain.setDriveVelocity(65, persen); // Dorong ke depan sejauh 500 mm untuk bertabrakan dengan bola Drivetrain.driveFor(maju, 500, mm); } - Saat fase pengujian berlanjut, tinjau tabel data siswa dan minta kelompok untuk menjelaskan bagaimana mereka memilih kecepatan terbaik untuk tantangan tersebut. Dua variabel utama yang harus menjadi fokus adalah kecepatan robot dan jumlah pin yang digerakkan, tetapi perkiraan jarak tempuh bola juga dapat dipertimbangkan. Sekali lagi, dorong pengujian yang hanya memanipulasi satu variabel pada satu waktu: kecepatan robot.