
अपने प्रोजेक्ट को डिज़ाइन, विकसित और पुनरावृत्त करें - C++
अपनी परियोजना को डिजाइन करते समय अपनी इंजीनियरिंग नोटबुक में निम्नलिखित प्रश्नों के उत्तर दें।
-
आप इस परियोजना में रोबोट से क्या करवाना चाहते हैं? विस्तार से समझाएं।
-
परियोजना का परीक्षण करने के लिए आप क्या कदम उठाएंगे? विस्तार से समझाएं।
-
आपके रोबोट को कार्य को सर्वाधिक सटीकता से पूरा करने के लिए कैसे प्रोग्राम किया जा सकता है? विस्तार से समझाएं।
![]() शिक्षक टूलबॉक्स
-
उत्तर
शिक्षक टूलबॉक्स
-
उत्तर
-
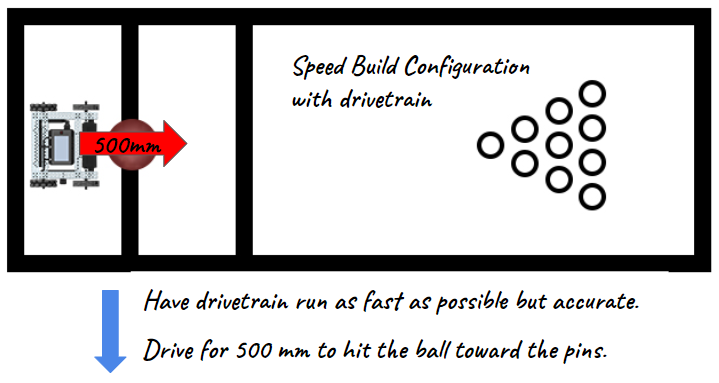
उत्तर में संभवतः इतनी तेजी से और पर्याप्त दूरी तक ड्राइव करना शामिल होगा कि सटीकता बनाए रखते हुए इष्टतम बल के साथ गेंद तक पहुंच कर उसे आगे की ओर धकेला जा सके। विद्यार्थियों से यह समझाने के लिए कहें कि रोबोट का गेंद से तथा गेंद का पिनों से टकराव उनकी योजनाओं में किस प्रकार शामिल था। इसे न्यूटन के दूसरे नियम से जोड़ें तो विद्यार्थी संभवतः रोबोट को 100% वेग से चलाने के लिए सेट करना चाहेंगे। लेकिन इस बात पर प्रकाश डालें कि यद्यपि रोबोट के लिए उच्चतम वेग गेंद के अधिकतम त्वरण और टक्कर के बाद पिनों को भी अधिकतम त्वरण प्रदान करेगा, फिर भी रोबोट के लिए उच्चतम वेग इस चुनौती में सटीकता को खतरे में डाल सकता है। उन्हें दोनों के बीच समझौता करना होगा और वे डेटा एकत्र करने और इस चुनौती के लिए सर्वोत्तम वेग तय करने के लिए नीचे दी गई नई तालिका या अपनी पिछली तालिकाओं का उपयोग कर सकते हैं।
-
उत्तर में छद्म कोड लिखना, रोबोट द्वारा तय की जाने वाली दूरी को मापना, उस माप को मिलीमीटर में परिवर्तित करना, तथा परियोजना को चलाना शामिल होना चाहिए। सुनिश्चित करें कि छात्र प्रोग्रामिंग के लिए सेंटीमीटर या मीटर को मिलीमीटर में बदलना समझते हैं।
-
सेंटीमीटर को मिलीमीटर में बदलने के लिए पूर्ण संख्या के अंत में शून्य जोड़ना पड़ता है। उदाहरण के लिए, 10 सेमी 100 मिमी के बराबर है।
-
मीटर को मिलीमीटर में बदलने के लिए पूर्ण संख्या के अंत में तीन शून्य जोड़ने की आवश्यकता होती है। उदाहरण के लिए, 1 मीटर 1000 मिमी के बराबर है।
-
-
उत्तर में रोबोट के प्रारंभिक स्थान से गेंद के प्रारंभिक स्थान तक की सटीक दूरी को मापना तथा उस माप का उपयोग करके रोबोट द्वारा तय की जाने वाली सटीक दूरी को प्रोग्राम करना शामिल हो सकता है। इसके अलावा, सटीकता बनाए रखते हुए ड्राइविंग के लिए इष्टतम वेग का पता लगाना भी महत्वपूर्ण है।
अपना प्रोजेक्ट बनाते समय नीचे दिए गए चरणों का पालन करें:
- चित्रों और छद्म कोड का उपयोग करके उस पथ की योजना बनाएं जिसे आप अपने रोबोट के लिए प्रोग्राम करना चाहते हैं (Google / .docx / .pdf)।
- अपने प्रोजेक्ट को विकसित करने के लिए आपके द्वारा बनाए गए छद्मकोड का उपयोग करें।
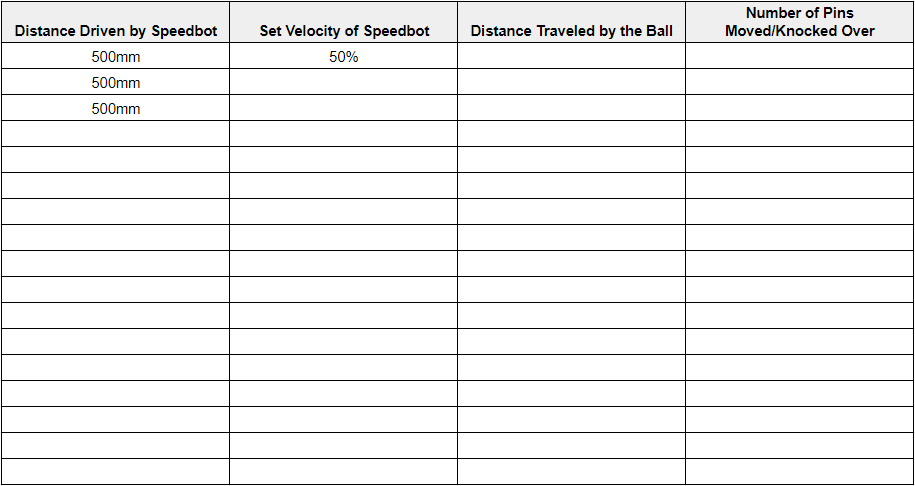
- अपने प्रोजेक्ट को अक्सर C++ में परीक्षण करें और परीक्षण से जो सीखा है उसका उपयोग करके उस पर पुनरावृत्ति करें। प्रत्येक परीक्षण के बाद, रिकॉर्ड करें कि रोबोट कितनी दूर तक चला, वेग क्या निर्धारित किया गया, गेंद कितनी दूर तक गई, तथा कितने पिनों को चलाया गया। यहां डेटा संग्रहण और विश्लेषण के लिए एक अद्यतन तालिका दी गई है।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
- स्ट्राइक चैलेंज की तालिका यहां से डाउनलोड और प्रिंट की जा सकती है (गूगल.pdf), या छात्र इंजीनियरिंग नोटबुक में तालिका को फिर से बना सकते हैं।
-
विद्यार्थियों से कहें कि वे अपने प्रस्तावित पथ को मापने के लिए रूलर का उपयोग करें। इसके बाद, दूसरे चरण पर जाने से पहले छात्रों को अपने छद्म कोड का मूल्यांकन करने को कहें।
-
छात्रों को निर्देश दें कि वे अपने प्रोजेक्ट में संगठन, प्रवाह और समस्या निवारण में सहायता के लिए छद्म कोड को टिप्पणी के रूप में उपयोग करें। छात्रों से कहें कि वे अपने प्रोजेक्ट में निर्देश जोड़ने से पहले अपने छद्म कोड का मूल्यांकन करें। आप यहां छद्मकोड रूब्रिक डाउनलोड कर सकते हैं (Google / .docx / .pdf)। चुनौती को पूरा करने में छात्रों की मदद करते समय संदर्भ के लिए नीचे दिए गए उदाहरण को देखें:
int main() { // रोबोट कॉन्फ़िगरेशन आरंभ कर रहा है. दूर नहीं करते! vexcodeInit(); // प्रोजेक्ट कोड शुरू करें // गेंद को दूर धकेलने के लिए ड्राइव वेलोसिटी को 50% से अधिक पर सेट करें Drivetrain.setDriveVelocity(65, percent); // गेंद से टकराने के लिए 500 मिमी आगे ड्राइव करें Drivetrain.driveFor(forward, 500, mm); } - जैसे-जैसे परीक्षण चरण आगे बढ़ता है, छात्रों की डेटा तालिकाओं की समीक्षा करें और समूहों से यह समझाने के लिए कहें कि उन्होंने चुनौती के लिए सर्वोत्तम वेग का चयन कैसे किया। दो मुख्य चर जिन पर उन्हें ध्यान केंद्रित करना चाहिए वे हैं रोबोट का वेग और स्थानांतरित पिनों की संख्या, लेकिन गेंद की अनुमानित यात्रा दूरी पर भी विचार किया जा सकता है। पुनः, ऐसे परीक्षण को प्रोत्साहित करें जो एक समय में केवल एक चर पर ही नियंत्रण रखे: रोबोट का वेग।