
Жобаңызды құрастырған кезде инженерлік дәптердегі келесі сұрақтарға жауап беріңіз.
-
Жобада робот не істегенін қалайсыз? Мәліметтермен түсіндіріңіз.
-
Жобаны сынау үшін қандай қадамдарды орындайсыз? Мәліметтермен түсіндіріңіз.
-
Тапсырманы барынша дәл орындау үшін роботты қалай бағдарламалауға болады? Мәліметтермен түсіндіріңіз.
![]() Мұғалімнің құралдар жинағы
-
жауаптар
Мұғалімнің құралдар жинағы
-
жауаптар
-
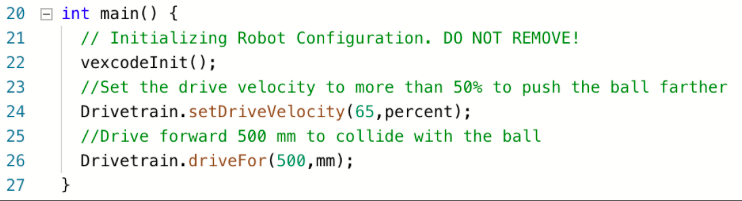
Жауаптар дәлдікті сақтай отырып, допты оңтайлы күшпен алға итеру және жету үшін жеткілікті жылдам және алыс жүруді қамтуы мүмкін. Оқушылардан роботтың доппен және доптың түйреуіштермен соқтығысуы олардың жоспарларына қалай әсер еткенін түсіндіруді сұраңыз. Мұны Ньютонның екінші заңына қосыңыз және студенттер роботты 100% жылдамдықпен жүргізетін етіп орнатқысы келуі мүмкін. Бірақ робот үшін ең жоғары жылдамдық доптың және соқтығысқаннан кейін түйреуіштердің ең үлкен үдеуіне әкелсе де, робот үшін ең жоғары жылдамдық бұл тапсырмадағы дәлдікке қауіп төндіруі мүмкін екенін атап өтіңіз. Олар екеуінің арасында ымыраға келу керек және олар деректерді жинау және осы тапсырманың ең жақсы жылдамдығын шешу үшін төмендегі жаңа кестені немесе алдыңғы кестелерді пайдалана алады.
-
Жауаптар псевдокодты жазуды, робот жүруі керек қашықтықты өлшеуді, сол өлшемді миллиметрге түрлендіруді және жобаны іске қосуды қамтуы керек. Студенттердің бағдарламалау үшін сантиметрді немесе метрді миллиметрге қалай түрлендіру керектігін түсінетініне көз жеткізіңіз.
-
Сантиметрді миллиметрге түрлендіру үшін бүтін санның соңына нөл қосу керек. Мысалы, 10см 100мм-ге тең.
-
Метрлерді миллиметрге түрлендіру үшін бүтін санның соңына үш нөл қосу керек. Мысалы, 1м 1000мм-ге тең.
-
-
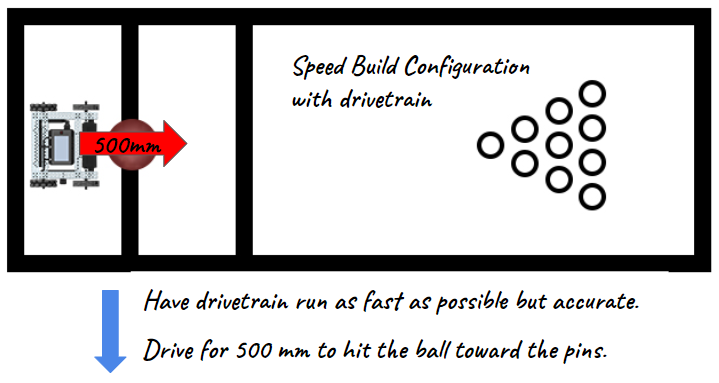
Жауаптар роботтың басталу орнының доптың басталу орнына дейінгі нақты қашықтығын өлшеуді және роботтың жүруі қажет нақты қашықтықты бағдарламалау үшін осы өлшемді пайдалануды қамтуы мүмкін. Сондай-ақ, дәлдікті сақтай отырып, қозғалыстың оңтайлы жылдамдығын табу маңызды.
Жобаңызды жасау кезінде төмендегі қадамдарды орындаңыз:
-
Сызбалар мен псевдокод (Google / .docx / .pdf) арқылы роботты бағдарламалағыңыз келетін жолды жоспарлаңыз.
-
Жобаңызды әзірлеу үшін өзіңіз жасаған псевдокодты пайдаланыңыз.
-
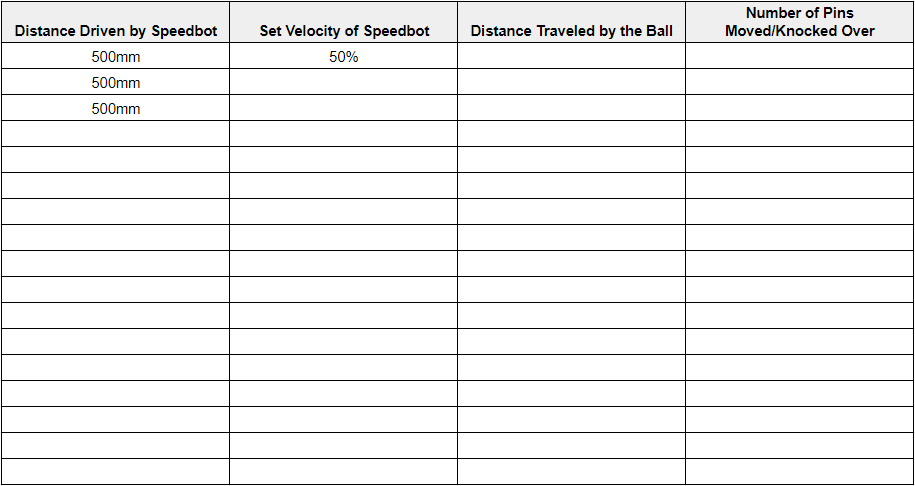
Жобаңызды in C++ тілінде жиі сынап көріңіз және тестілеуден үйренгеніңізді пайдалана отырып, оны қайталаңыз. Әрбір сынақтан кейін роботтың қанша қашықтықты жүргізгенін, қандай жылдамдыққа орнатылғанын, доптың қаншалықты алыс жүргенін және қанша түйреуіш қозғалғанын жазып алыңыз. Мұнда деректерді жинау және талдау үшін жаңартылған кесте берілген.
![]() Мұғалімге арналған кеңестер
Мұғалімге арналған кеңестер
-
Strike Challenge кестесін осы жерден жүктеп алуға және басып шығаруға болады (Google / .pdf) немесе студенттер кестені инженерлік жазу кітапшаларында қайта жасай алады.
-
Оқушылардан ұсынылған жолды өлшеу үшін сызғышты пайдалануды сұраңыз. Содан кейін студенттерден екінші қадамға өтпес бұрын өздерінің псевдокодын бағалауды сұраңыз.
-
Ұйымдастыруға, ағынға және ақаулықтарды жоюға көмектесу үшін студенттерге псевдокодты өз жобаларында түсініктеме ретінде пайдалануға нұсқау беріңіз. Студенттерден жобаларына нұсқауларды қоспас бұрын олардың псевдокодын бағалауды сұраңыз. Псевдокод айдарын мына жерден жүктеп алуға болады (Google / .docx / .pdf).
-
Тестілеу кезеңі жалғасып жатқанда, студенттердің деректер кестелерін қарап шығыңыз және топтардан тапсырма үшін ең жақсы жылдамдықты қалай таңдағанын түсіндіруді сұраңыз. Оларға назар аудару керек екі негізгі айнымалы - роботтың жылдамдығы және жылжытылған түйреуіштер саны, бірақ доптың шамамен жүріп өткен қашықтығы да қарастырылуы мүмкін. Тағы да, бір уақытта тек бір айнымалыны басқаратын тестілеуді ынталандырыңыз: роботтың жылдамдығы.