
Oefening voor de Vision Data Challenge - Blokkengebaseerd
![]() Toolbox voor leerkrachten
-
Het doel van deze activiteit
Toolbox voor leerkrachten
-
Het doel van deze activiteit
Bij deze activiteit passen leerlingen toe wat ze op de vorige pagina hebben geleerd om een dataset aan te vullen met behulp van een voorbeeldmomentopname. Ze vullen ontbrekende waarden in, berekenen de X- en Y-waarden voor het middelpunt en interpreteren wat de gegevens ons vertellen over de positie van het object ten opzichte van het middelpunt van de robot. Hiermee bereiden we ze voor op succes bij de komende Vision Data Challenge.
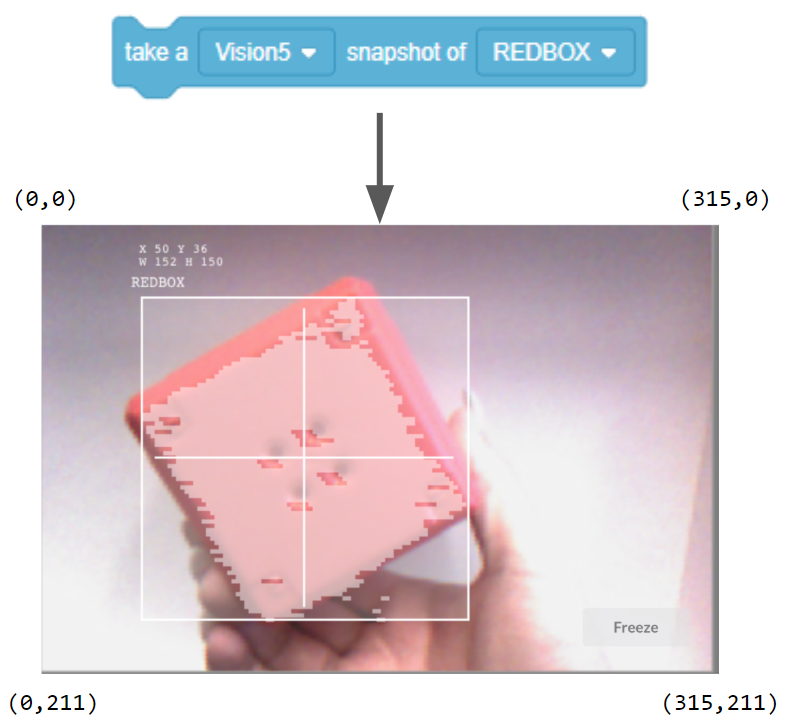
Voeg de ontbrekende waarden hieronder toe aan je technische notitieblok.
Hier zijn de verstrekte gegevens uit de momentopname:
- X = 50
- Y = 36
- W = 152
- H = 150
- Staat de REDBOX links of rechts van het middelpunt van de robot?
- Is de REDBOX hoger of lager dan het middelpunt van de robot?
![]() Tips voor leraren
Tips voor leraren
Wijs de leerlingen erop dat het detectiekader de REDBOX niet volledig bedekt. Dat is oké. De REDBOX wordt nog steeds herkend. Het is niet waarschijnlijk dat het afstemmen van de Vision Sensor het detectiekader zal perfectioneren, en dat is prima. De Vision Sensor herkent het merendeel van de REDBOX.
![]() Toolbox voor leraren
-
antwoorden
Toolbox voor leraren
-
antwoorden
U kunt de antwoorden van de studenten klassikaal bespreken en/of hun technische notitieboekjes doornemen om er zeker van te zijn dat ze de activiteit hebben afgerond.
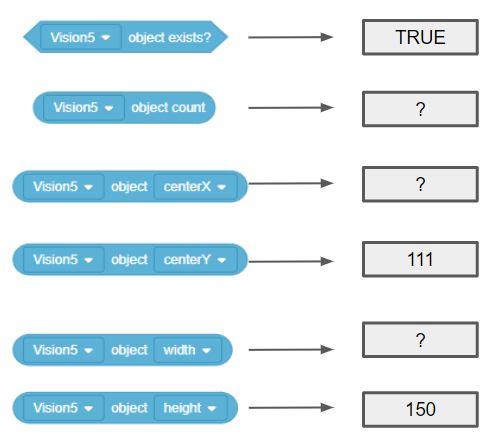
Er is slechts één object (objectenaantal = 1) in de momentopname en de breedte wordt door het programma bepaald (objectbreedte = 152). De centrale X-waarde is 152/2 + 50 = 126.
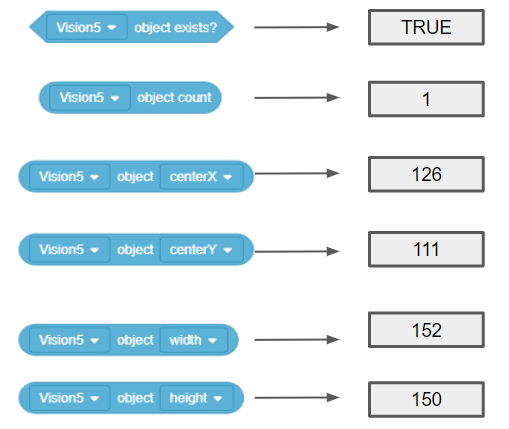
- De REDBOX bevindt zich links van het middelpunt van de robot (iets links van het midden). De REDBOX bevindt zich 31,5 pixels (midden 157,5 - 126) links van het middelpunt van de robot.
- De REDBOX bevindt zich lager dan het middelpunt van de robot (iets lager dan het midden). De REDBOX bevindt zich 5,5 pixels (111 - midden 105,5) onder het middelpunt van de robot.