
แข่งขัน
ตอนนี้คุณได้ลองทำการออกแบบแขนและฝึกการวางลูกบาศก์ซ้อนกันด้วยหุ่นยนต์แล้ว คุณก็พร้อมที่จะแข่งขันใน Stacked Up Challenge ได้เลย!
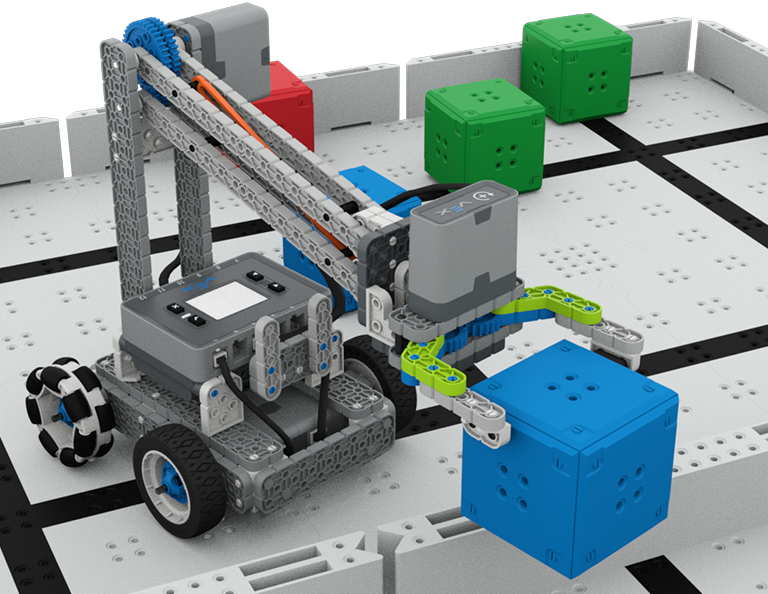
เป้าหมายของความท้าทายการทดลองจับเวลานี้คือการขับหุ่นยนต์ของคุณด้วยคอนโทรลเลอร์เพื่อวางลูกบาศก์ซ้อนกันบนสนาม คะแนนของคุณในการท้าทายจะถูกกำหนดตามจำนวนและความสูงของกองที่คุณสร้างไว้เมื่อสิ้นสุดระยะเวลา 60 วินาที ชมแอนิเมชั่นด้านล่างเพื่อดูตัวอย่างว่าหุ่นยนต์ของคุณจะเคลื่อนที่และเรียงลูกบาศก์ได้ ในความท้าทายนี้
ทำตามขั้นตอนในเอกสารนี้เพื่อทำภารกิจ Stacked Up ให้เสร็จสิ้น
เมื่อคุณทำ Stacked Up Challenge เสร็จแล้ว ให้ติดต่อครูของคุณ ให้แน่ใจว่าคุณได้บันทึกผลลัพธ์ของความท้าทายไว้ในสมุดบันทึกวิศวกรรมของคุณแล้ว
สรุปการสะท้อนความคิด
ตอนนี้คุณได้ปรับเปลี่ยนการออกแบบหุ่นยนต์ของคุณแล้ว และแข่งขันใน Stacked Up Challenge ถึงเวลาที่จะทบทวนสิ่งที่คุณได้เรียนรู้และได้ทำในบทเรียนนี้ เริ่มหน้าใหม่ในสมุดบันทึกวิศวกรรมของคุณเพื่อเริ่มต้นการสะท้อนความคิดของคุณ
ให้คะแนนตัวเองในฐานะมือใหม่ ผู้ฝึกหัด หรือผู้เชี่ยวชาญในแต่ละแนวคิดต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ ให้คำอธิบายสั้นๆ ว่าเหตุใดคุณจึงให้คะแนนตัวเองในแต่ละแนวคิดดังนี้:
- การออกแบบ การสร้าง และการทำซ้ำในการออกแบบแขนของคุณ
- การใช้แขนเพื่อวางลูกบาศก์
- ร่วมมือกับสมาชิกในทีมเพื่อคิดและทดสอบการออกแบบแขน
ใช้ตารางนี้เพื่อช่วยคุณกำหนดว่าคุณอยู่ในหมวดหมู่ใด
| ผู้เชี่ยวชาญ | ฉันคิดว่าฉันเข้าใจแนวคิดนี้เป็นอย่างดีและสามารถสอนเรื่องนี้ให้กับคนอื่นได้ |
| ลูกจ้างฝึกงาน | ฉันรู้สึกว่าตนเองเข้าใจแนวคิดเพียงพอที่จะแข่งขันความท้าทายนี้ได้ |
| สามเณร | ฉันรู้สึกว่าฉันไม่เข้าใจคอนเซปต์และไม่รู้ว่าจะทำความท้าทายนี้ให้สำเร็จได้อย่างไร |
ต่อไปจะเป็นอะไร?
ในบทเรียนนี้ คุณจะได้เรียนรู้เกี่ยวกับการออกแบบแขนหุ่นยนต์รูป ต่างๆ และปรับปรุงการสร้างของคุณ
ในบทเรียนถัดไปคุณจะได้
- เรียนรู้เกี่ยวกับกลุ่มมอเตอร์ใน VEXcode IQ
- เลือกไดรเวอร์สำหรับการแข่งขัน
- ร่วมแข่งขันใน Up and Over Challenge!
เลือก < กลับไปที่บทเรียน เพื่อกลับไปยังภาพรวมบทเรียน
เลือก ถัดไป บทเรียน > เพื่อไปต่อที่บทเรียนที่ 4 และเรียนรู้เกี่ยวกับกลุ่มมอเตอร์