
Projenizi Tasarlayın, Geliştirin ve Yineleyin - Python
Projenizi tasarlarken aşağıdaki soruları mühendislik defterinize cevaplayın:
- Robotu ne yapması için programlamak istiyorsunuz? Ayrıntılarıyla açıklayın.
- Projeyi test etmek için hangi adımları izleyeceksiniz? Ayrıntılarıyla açıklayın.
- Robotunuz görevi daha verimli bir şekilde tamamlamak için nasıl programlanabilir? Nasıl olduğunu açıklayın.
![]() Öğretmen Araç Kutusu
-
Cevap
Öğretmen Araç Kutusu
-
Cevap
-
Genel olarak, robotun ileri gitme, dönme ve bekleme gibi basit programlama davranışlarını kullanarak odadan odaya gitmesi ve ilaç bırakması planlanıyor.
-
Test planı muhtemelen sahayı kullanarak denemeler yapmayı ve projeyi hata ayıklamayı içerecektir.
-
Olası cevaplar arasında şunlar yer alabilir: en kısa rotayı kullanmak veya döngüler ya da değişkenler gibi daha karmaşık programlamayı kullanmak.
Projenizi oluştururken aşağıdaki adımları izleyin:
-
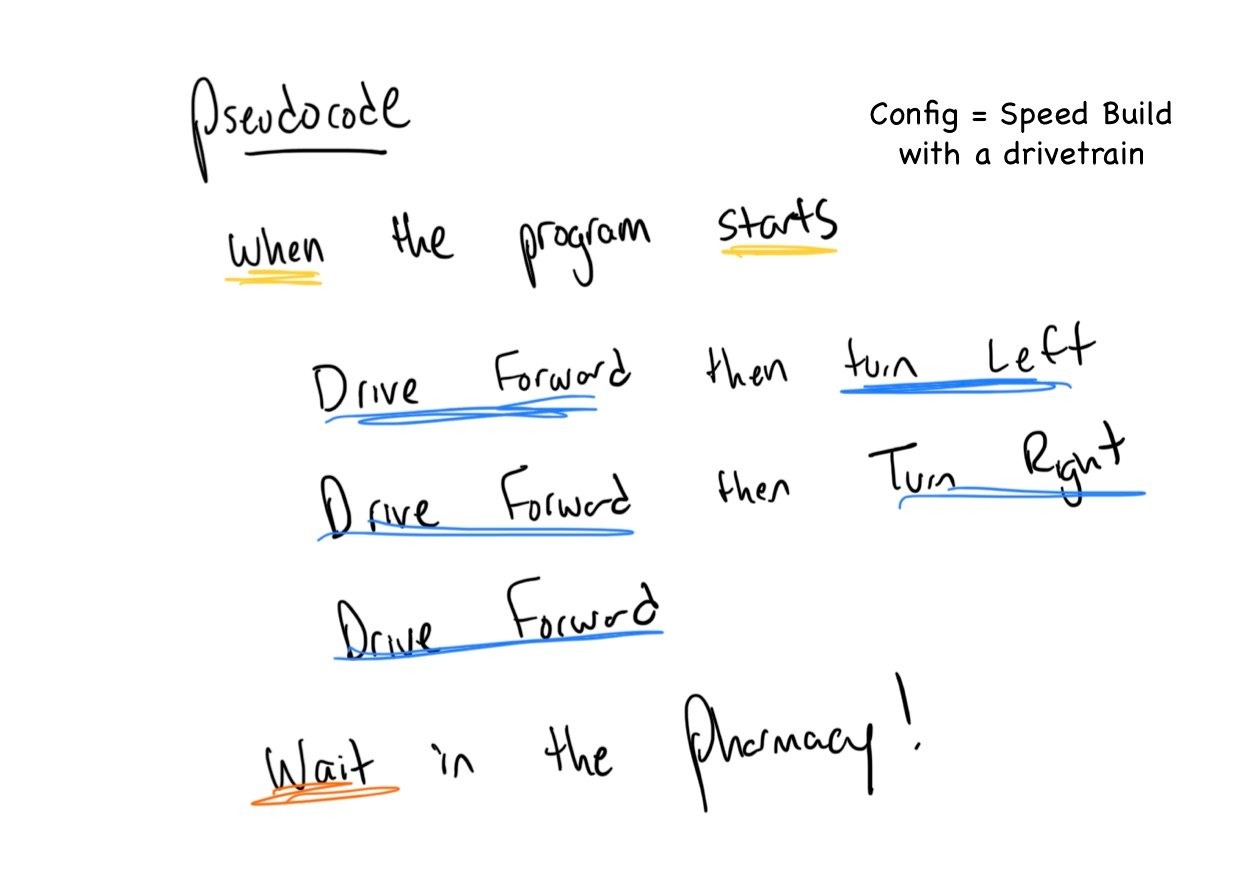
Bir cetvel kullanarak, robotunuzu çizimleri ve sözde kodlamayı (Google /.docx /.pdf ) kullanarak almak üzere programlamak istediğiniz yolu planlayın. İkinci adıma geçmeden önce sözde kodunuzu değerlendirin.
-
Projenizi geliştirmek için oluşturduğunuz sözde kodu kullanın.
-
Projenizi sık sık test edin ve testlerinizden öğrendiklerinizi kullanarak üzerinde yineleyin.
![]() Öğretmen İpuçları
Öğretmen İpuçları
-
Öğrencilerden önerdikleri yolu bir cetvel kullanarak ölçmelerini isteyin. Daha sonra, ikinci adıma geçmeden önce öğrencilerin sözde kodlarını değerlendirmelerini sağlayın.
- Öğrencilere projelerinde organizasyon, akış ve sorun gidermeye yardımcı olması için sözde kodu yorum olarak kullanmaları talimatını verin. Öğrencilere projelerine başlamadan önce sözde kodlarını değerlendirmelerini hatırlatın. Burada bir sözde kod değerlendirme ölçütü indirebilirsiniz (Google / .docx / .pdf).
-
Öğrencilerinize bu görevi tamamlamalarında yardımcı olurken referans olması açısından aşağıdaki VEXcode V5 Python örnek kodunu inceleyin:
# Kütüphane vex'ten içe aktarır * # Proje kodunu başlat # İleri sürün, sonra sola dönün drivetrain.drive_for(FORWARD, 650, MM) drivetrain.turn_for(LEFT, 90, DEGREES) # İleri sürün, sonra sağa dönün drivetrain.drive_for(FORWARD, 900, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) # Eczaneye doğru sürün ve bekleyin drivetrain.drive_for(FORWARD, 300, MM) wait(3, SECONDS)
![]() Öğretmen İpuçları
Öğretmen İpuçları
Öğrenciler yeni bir proje açmadan önce bir şablon seçmek zorundadırlar. Şablon proje seçili robotun motor konfigürasyonunu içerir. Şablon kullanılmazsa robot projeyi doğru şekilde çalıştıramaz.
Başlarken sorun yaşıyorsanız, örnek projeleri gözden geçirin.
Örnek projeleri görüntülemek fikir üretmeye yardımcı olabilir.

Aşağıdaki adımları tamamlayın:
- Dosyamenüsünü açın.
- Açık Örnekleri Seçin.
