
ตอบคำถามต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณขณะที่คุณออกแบบโครงการของคุณ:
- คุณต้องการโปรแกรมหุ่นยนต์ให้ทำอะไร? อธิบายให้ละเอียด.
- คุณจะทำตามขั้นตอนใดเพื่อทดสอบโครงการ? อธิบายให้ละเอียด.
- คุณจะตั้งโปรแกรมหุ่นยนต์ให้ทำงานได้อย่างมีประสิทธิภาพมากขึ้นได้อย่างไร? อธิบายวิธีการ
![]() กล่องเครื่องมือสำหรับครู
-
คำตอบ
กล่องเครื่องมือสำหรับครู
-
คำตอบ
-
โดยทั่วไป แผนควรเป็นการให้หุ่นยนต์ขับจากห้องหนึ่งไปอีกห้องหนึ่ง และนำยามาส่งโดยใช้พฤติกรรมการตั้งโปรแกรมง่ายๆ เช่น ขับไปข้างหน้า เลี้ยว และรอ
-
แผนการทดสอบน่าจะเกี่ยวข้องกับการใช้สนามในการทดลองและแก้ไขจุดบกพร่องของโครงการ
-
คำตอบที่เป็นไปได้อาจรวมถึง: การใช้เส้นทางที่สั้นที่สุด หรือใช้การเขียนโปรแกรมที่ซับซ้อนกว่า เช่น ลูปหรือตัวแปร
ปฏิบัติตามขั้นตอนต่อไปนี้ขณะที่คุณสร้างโครงการของคุณ:
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
ขอให้นักเรียนใช้ไม้บรรทัดเพื่อวัดเส้นทางที่เสนอ จากนั้นให้ให้ผู้เรียนประเมินซูโดโค้ดของตนก่อนที่จะดำเนินการขั้นตอนที่สอง
- สั่งให้นักเรียนใช้ซูโดโค้ดเป็นความคิดเห็นในโครงการของตนเพื่อช่วยในการจัดระเบียบ การไหล และการแก้ไขปัญหา เตือนนักเรียนให้ประเมินซูโดโค้ดก่อนที่จะเริ่มโครงการ คุณสามารถดาวน์โหลดเกณฑ์การให้คะแนน pseudocode ได้ที่นี่ (Google / .docx / .pdf)
-
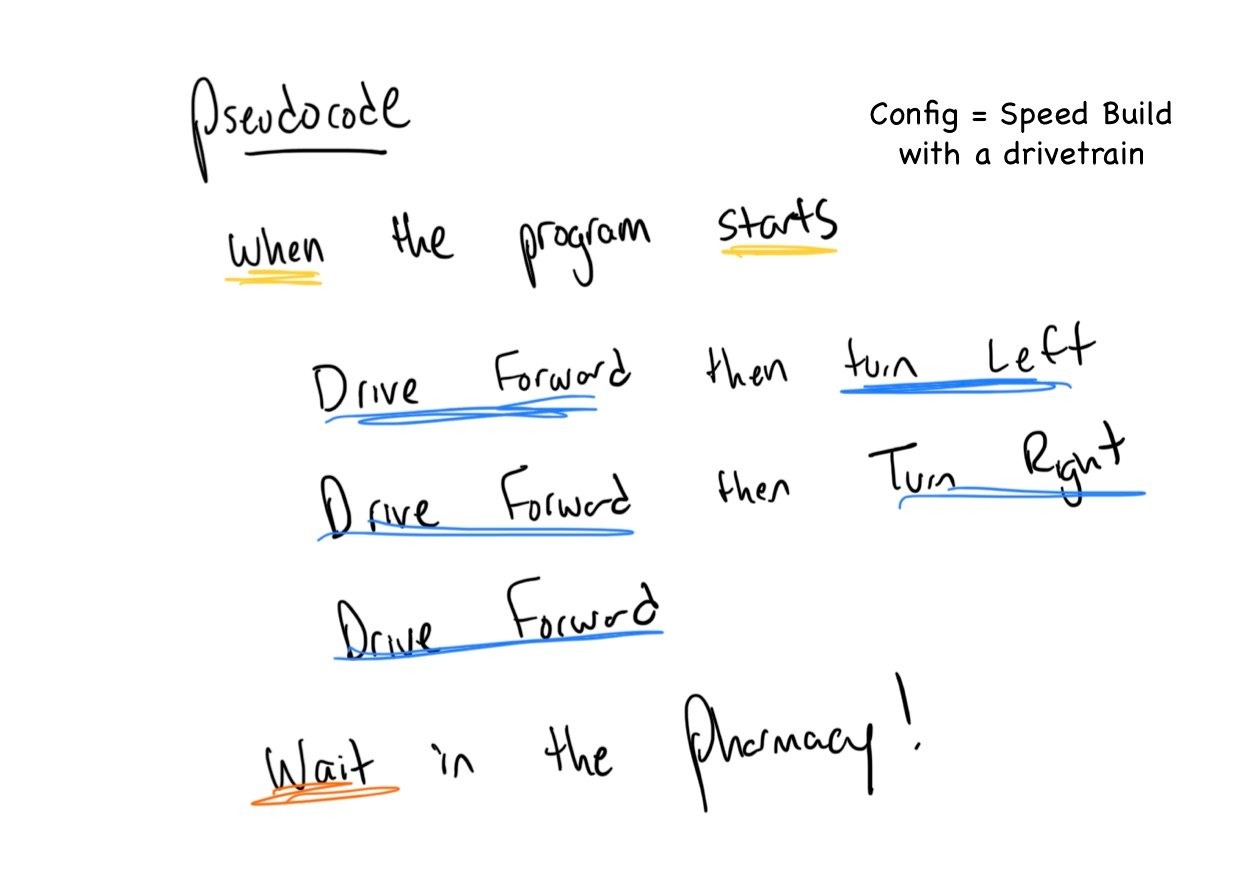
ดูตัวอย่างโค้ด Python VEXcode V5 ต่อไปนี้เพื่อใช้เป็นข้อมูลอ้างอิงขณะที่คุณช่วยนักเรียนทำภารกิจให้สำเร็จ:
# ไลบรารีนำเข้า จากการนำเข้า vex * # เริ่มรหัสโครงการ # ขับไปข้างหน้าแล้วเลี้ยวซ้าย drivetrain.drive_for(FORWARD, 650, MM) drivetrain.turn_for(LEFT, 90, DEGREES) # ขับไปข้างหน้าแล้วเลี้ยวขวา drivetrain.drive_for(FORWARD, 900, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) # ขับไปข้างหน้าเข้าไปในร้านขายยาและรอ drivetrain.drive_for(FORWARD, 300, MM) wait(3, SECONDS)
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
ก่อนที่นักเรียนจะเปิดโครงการใหม่พวกเขาจะต้องเลือกเทมเพลต โครงการเทมเพลตประกอบด้วยการกำหนดค่ามอเตอร์ของหุ่นยนต์ที่เลือก หากไม่ใช้เทมเพลต หุ่นยนต์จะไม่สามารถรันโครงการได้อย่างถูกต้อง
หากคุณประสบปัญหาในการเริ่มต้น โปรดทบทวนโครงการตัวอย่าง
การดูตัวอย่างโครงการสามารถช่วยสร้างแนวคิดได้

ดำเนินการตามขั้นตอนต่อไปนี้:
- เปิดเมนู ไฟล์
- เลือก เปิดตัวอย่าง.
