
Lý lịch
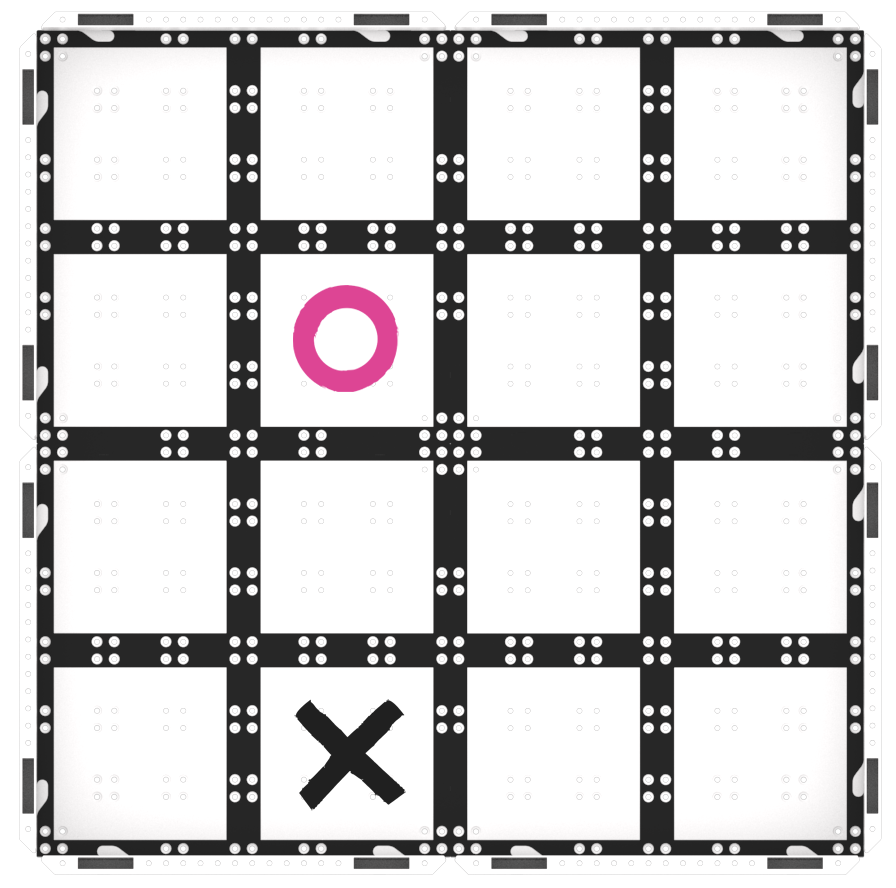
Đơn vị vận hành bề mặt: Xe tự hành trên sao Hỏa sẽ giúp bạn và học sinh của bạn làm quen với việc xây dựng các dự án VEXcode GO để giải quyết vấn đề. Hoạt động của xe tự hành Perseverance và Sứ mệnh sao Hỏa 2020 được dùng làm nguồn cảm hứng cho những thử thách mà học sinh sẽ giải quyết bằng cách sử dụng VEXcode GO và Code Base. Các dự án họ tạo ra sẽ cần phải được sắp xếp theo trình tự chính xác để thu thập mẫu và 'chôn' chúng.
Sứ mệnh Sao Hỏa 2020 của NASA
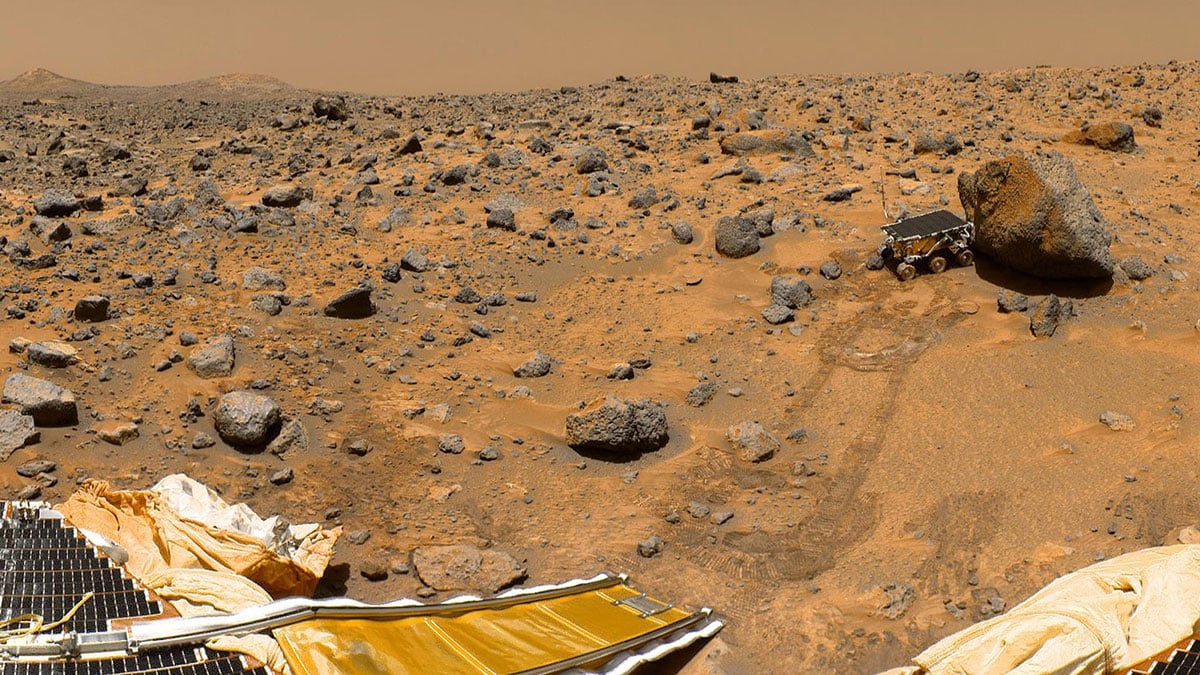
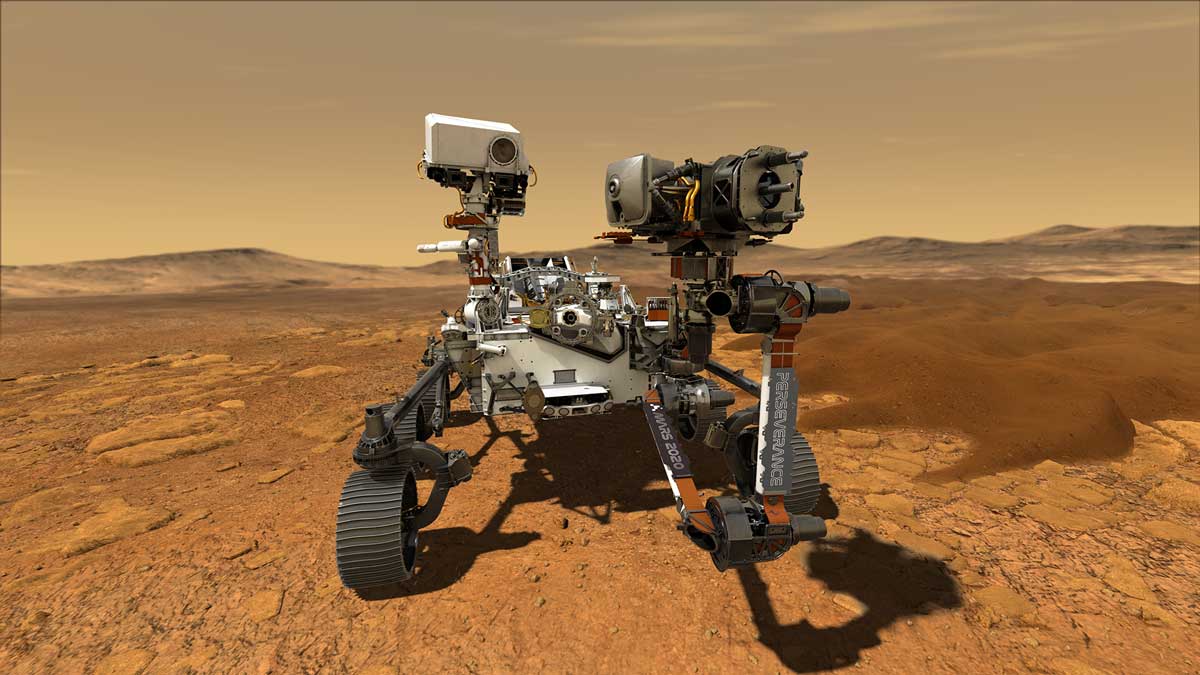
Sứ mệnh Sao Hỏa 2020 của NASA giải quyết các mục tiêu khoa học ưu tiên hàng đầu trong quá trình khám phá Sao Hỏa: sự sống, khí hậu, địa chất và con người. Xe tự hành Perseverance sẽ hoàn thành các hoạt động trên bề mặt để thu thập dữ liệu nhằm hỗ trợ nghiên cứu về Hành tinh Đỏ.
Xe tự hành là gì?
Xe tự hành là thiết bị được thiết kế để di chuyển trên bề mặt rắn của một hành tinh hoặc thiên thể khác (như Mặt Trăng). Một số xe tự hành được thiết kế để vận chuyển các thành viên của phi hành đoàn, trong khi một số khác là robot tự động một phần hoặc hoàn toàn. Những robot này thường có nhiệm vụ thu thập thông tin về địa hình và thu thập mẫu đá, đất, đất hoặc thậm chí là chất lỏng.
Hoạt động bề mặt là gì?
Hoạt động bề mặt là các nghiên cứu khoa học mà tàu thám hiểm sẽ thực hiện trên sao Hỏa. Tất cả đều tập trung vào việc tìm kiếm, thu thập và lưu trữ các mẫu địa chất. Để bắt đầu, Perseverance sẽ tìm kiếm những tảng đá hấp dẫn. Một loại đá có thể được coi là hấp dẫn nếu nó có khả năng lưu giữ dấu vết hóa học của sự sống cổ đại hoặc đã bị biến đổi bởi môi trường hỗ trợ sự sống của vi khuẩn.
Sau khi xác định được loại đá hấp dẫn, Perseverance sẽ khoan lấy mẫu, đặt vào ống kín và cất giữ trên bề mặt. Lưu trữ kho, được sử dụng trong nhiệm vụ này, là nơi nhiều mẫu được lưu giữ hoặc chôn tại cùng một vị trí. Một sứ mệnh trong tương lai sẽ có thể lấy lại những mẫu vật này và trả lại toàn bộ cho các nhà khoa học trên Trái Đất.
Trình tự là gì?
Trình tự là thứ tự cụ thể mà các hành vi được thực hiện. Một hành động hoặc sự kiện dẫn đến hành động tiếp theo theo trình tự. Trình tự rất quan trọng đối với Cơ sở mã, vì robot sẽ chỉ di chuyển chính xác theo lệnh được yêu cầu.
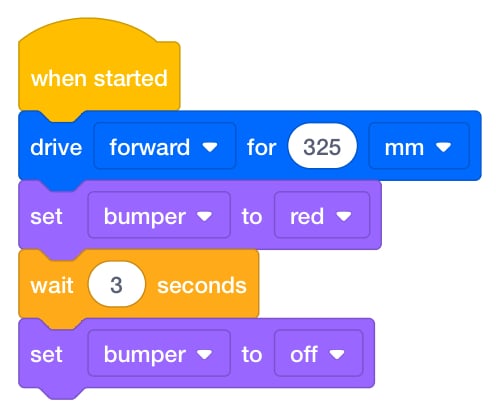
Trong hình ảnh động này, bạn có thể thấy dự án bắt đầu với khối {When started} ở đầu dự án, sau đó mỗi khối được thực thi theo thứ tự từ trên xuống dưới. Đế mã di chuyển về phía trước 325 milimét (mm) trên Sân GO, đợi 2 giây, sau đó phát sáng một màu trên Đèn LED cản. Tính năng nổi bật màu xanh lá cây xung quanh các khối cho biết khối nào đang chạy tại thời điểm đó. Điều này có thể cung cấp cho sinh viên phản hồi ngay lập tức để kết nối các hành vi của Code Base với các khối VEXcode GO cụ thể.
Các bước để sắp xếp một dự án
-
Đầu tiên, hãy xác định mục tiêu —cần phải làm gì? Ví dụ, lái xe từ điểm bắt đầu đến mẫu đầu tiên.
Lái xe đến đối tượng -
Sau đó, hãy chia nhỏ các bước cần thiết để đạt được mục tiêu và xác định những trở ngại cần thiết để hoàn thành các bước này. Ở đây, bạn sẽ cần di chuyển về phía trước 325 milimét (mm) để tiếp cận mẫu, sau đó cài đặt Cảm biến cản LED phát sáng màu đỏ để cho biết đang thu thập mẫu, đợi 3 giây để thu thập mẫu, sau đó tắt hoặc dừng phát sáng Cảm biến cản LED để cho biết mẫu đã được thu thập. Bạn có thể thực hiện việc này bằng các khối [Lái xe tới], [Chờ] và [Đặt màu cản].

khối [Lái xe tới], [Chờ] và [Đặt màu cản]
-
Tiếp theo, hãy lập kế hoạch cho trình tự của dự án bằng cách kéo các khối phù hợp vào không gian làm việc và gắn chúng vào khối {When started} từ trên xuống dưới. Khi thêm từng khối, hãy thay đổi các thông số để phù hợp với các bước đã chia nhỏ trước đó.
-
Chọn “Bắt đầu” để kiểm tra dự án và xem Cơ sở mã có đạt được mục tiêu đã xác định ở bước đầu tiên hay không.
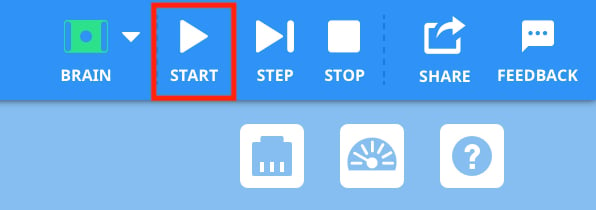
Chọn 'Bắt đầu'
Nếu bạn muốn thay đổi dự án, chỉ cần thay đổi các tham số hoặc thêm và xóa các khối khỏi dự án trước khi thử nghiệm lại.
VEXcode GO là gì?
VEXcode GO là môi trường lập trình được sử dụng để giao tiếp với robot VEX GO. Học sinh sử dụng giao diện kéo và thả để tạo các dự án VEXcode GO để điều khiển hành động của robot. Mục đích của mỗi khối có thể được xác định bằng các tín hiệu trực quan như hình dạng, màu sắc và nhãn. Để biết thêm thông tin về cách làm việc với VEXcode GO, xem Phần VEXcode GO của Thư viện VEX.
Các khối VEXcode GO sau đây sẽ được sử dụng trong Đơn vị này:
| Khối VEXcode GO | Hành vi |
|---|---|
 |
Khối {When start} bắt đầu chạy ngăn xếp khối được đính kèm khi dự án được bắt đầu. |
 |
Khối [Truyền động cho] di chuyển Hệ thống truyền động về phía trước hoặc lùi lại một khoảng cách nhất định. Thiết lập khoảng cách mà hệ thống truyền động sẽ di chuyển bằng cách nhập giá trị vào hình bầu dục. |
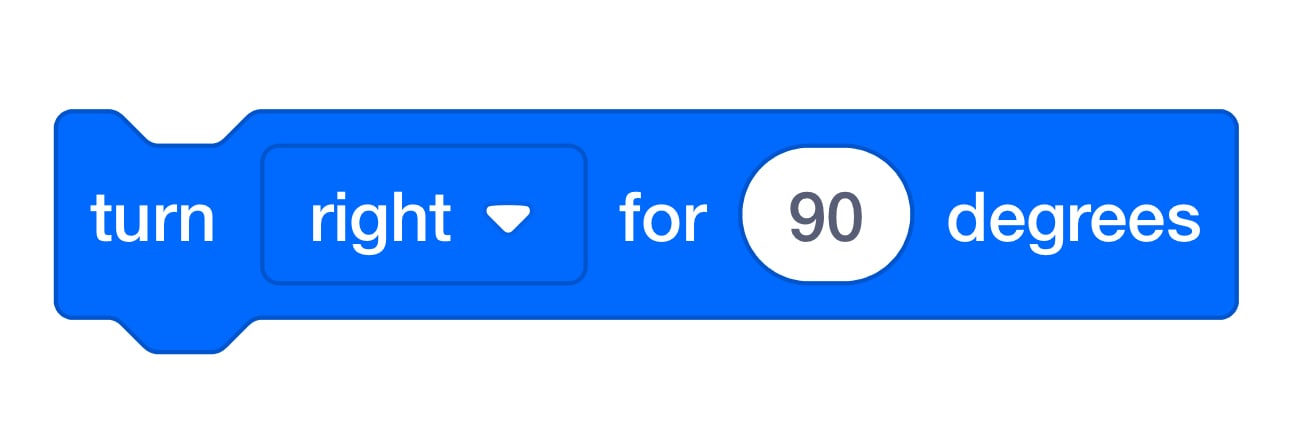 |
Khối [Quay tới] sẽ quay Hệ thống truyền động theo một khoảng cách nhất định. Thiết lập khoảng cách mà hệ thống truyền động sẽ quay bằng cách nhập giá trị vào hình bầu dục. |
 |
Khối [Chờ] sẽ đợi trong một khoảng thời gian cụ thể trước khi chuyển sang khối tiếp theo trong một dự án. |
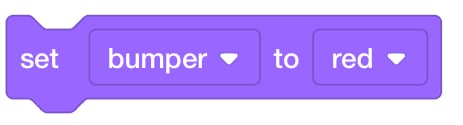 |
Khối [Đặt màu cản] thiết lập màu của cản đèn LED. |