
A Mars Rover: Unidade de Operações de Superfície irá familiarizar você e seus alunos com a construção de projetos VEXcode GO para resolver um problema. As ações do rover Perseverance e da Missão Marte 2020 são usadas como inspiração para os desafios que os alunos enfrentarão usando o VEXcode GO e a Base de Código. Os projetos que criam terão de ser corretamente sequenciados para recolher amostras e 'enterrá-las'.
Missão Mars 2020 da NASA
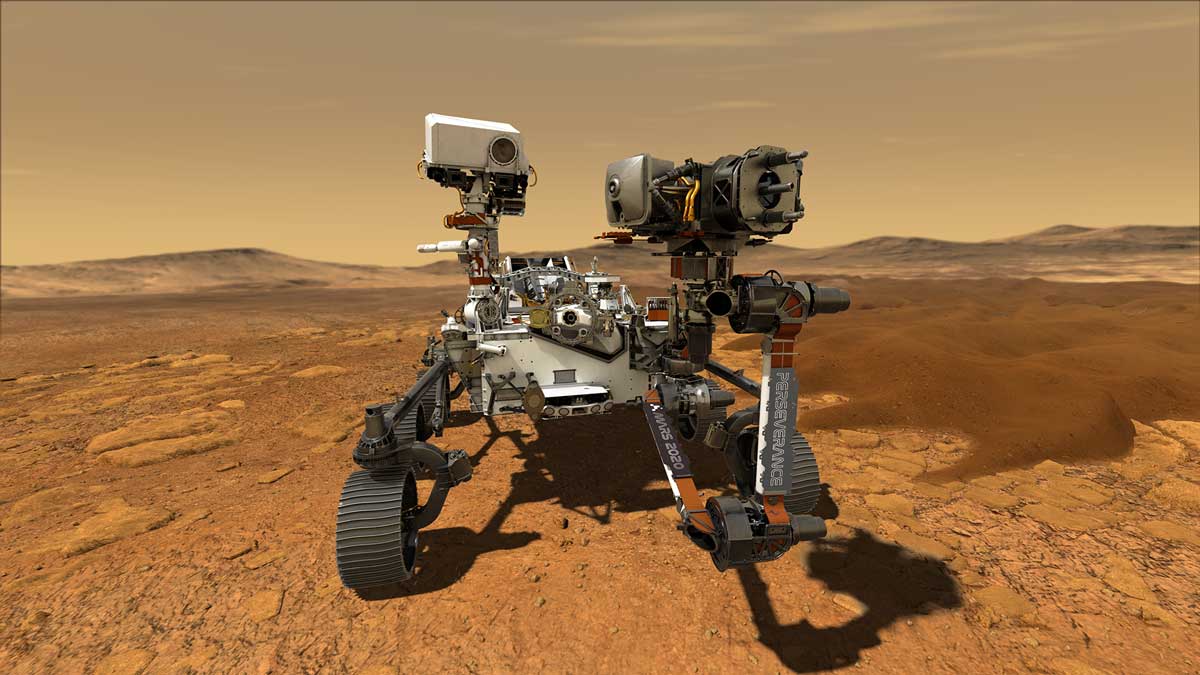
A missão Mars 2020 da NASA aborda objetivos científicos de alta prioridade para a exploração de Marte: vida, clima, geologia e seres humanos. O rover Perseverance completará as operações de superfície para coletar dados para ajudar a informar a pesquisa sobre o Planeta Vermelho.
O que é um rover?
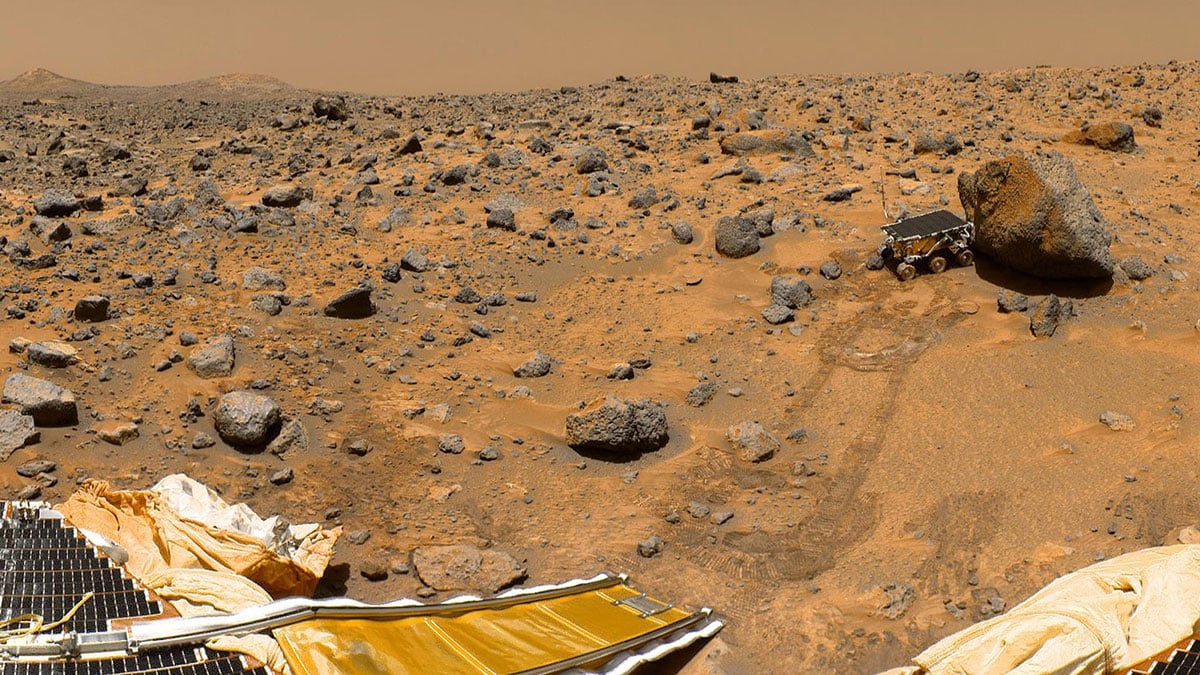
Um rover é um dispositivo projetado para se mover pela superfície sólida de um planeta ou outro corpo celeste (como a Lua). Alguns rovers são projetados para transportar membros de uma tripulação espacial, enquanto outros são robôs parcial ou totalmente autônomos. Esses robôs geralmente são encarregados de coletar informações sobre o terreno e coletar amostras de rochas, sujeira, solo ou mesmo líquidos.
O que são operações de superfície?
Operações de superfície são os estudos científicos que o rover estará completando em Marte. Todos eles estão focados em encontrar, coletar e armazenar em cache amostras geológicas. Para começar, a Perseverança procurará rochas convincentes. Uma rocha pode ser considerada atraente se tiver a possibilidade de ter preservado vestígios químicos de vida antiga ou de ter sido alterada por um ambiente que sustentava a vida microbiana.
Depois de identificar as rochas atraentes, a Perseverança perfurará uma amostra, a colocará em um tubo vedado e as armazenará na superfície. O cache do depósito, usado durante esta missão, é onde várias amostras são deixadas ou enterradas no mesmo local. Uma missão futura poderá então recuperar essas amostras e devolvê-las todas juntas aos cientistas na Terra.
O que é uma sequência?
Uma sequência é a ordem específica em que os comportamentos são realizados. Uma ação ou evento leva à próxima ação ordenada numa sequência. O sequenciamento é importante para a Base de Código, porque o robô só se moverá exatamente como os comandos indicarem.
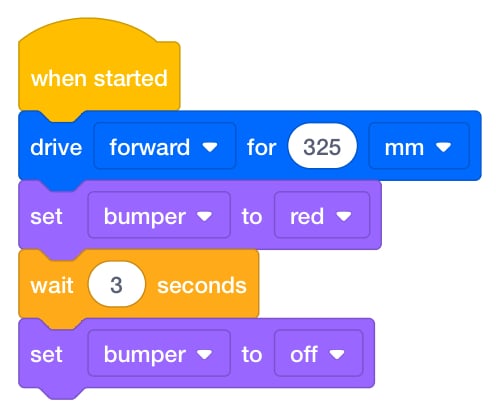
Nesta animação, você pode ver como o projeto começa com o {When started} bloco na parte superior do projeto e, em seguida, cada bloco é executado em ordem de cima para baixo. A Base de Código avança 325 milímetros (mm) num Campo GO, aguarda 2 segundos e, em seguida, acende uma cor no Pára-choques LED. O recurso de realce verde ao redor dos blocos indica qual bloco individual está em execução naquele momento. Isso pode fornecer aos alunos feedback imediato para conectar os comportamentos da Base de Código com blocos específicos do VEXcode GO.
Etapas para Sequenciar um Projeto
- Primeiro, identifique o objetivo - o que precisa ser feito? Por exemplo, conduza do início à primeira amostra.
Conduzir ao objeto - Em seguida, divida as etapas necessárias para atingir a meta e identifique os blocos necessários para realizar essas etapas. Aqui, você precisará avançar 325 milímetros (mm) para alcançar a amostra e, em seguida, definir o sensor de para-choque LED para acender em vermelho para mostrar que está coletando uma amostra, aguardar 3 segundos para coletar a amostra e, em seguida, fazer com que o sensor de para-choque LED pare ou desligue para indicar que a amostra foi coletada. Isso pode ser feito com os blocos [Drive for], [Wait] e [Set bumper color].
 Blocos
Blocos [Drive for], [Wait] e [Set bumper color] - Em seguida, planeje a sequência do projeto arrastando os blocos correspondentes para o espaço de trabalho e anexando-os ao {When started} bloco de cima para baixo. À medida que cada bloco é adicionado, altere os parâmetros para corresponder às etapas discriminadas anteriormente.
- Selecione "Iniciar" para testar o projeto e ver se a Base de Código atinge a meta identificada na primeira etapa.
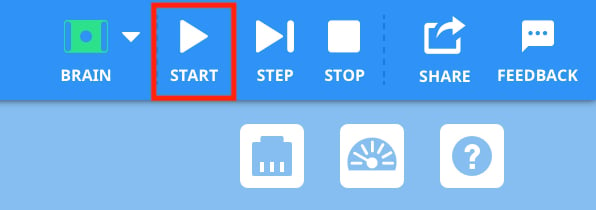
Seleccione "Iniciar"
Se quiser alterar o seu projeto, basta alterar os parâmetros ou adicionar e remover blocos do projeto antes de testar novamente.
O que é o VEXcode GO?
O VEXcode GO é um ambiente de codificação usado para se comunicar com robôs VEX GO. Os alunos usam a interface de arrastar e soltar para criar projetos VEXcode GO que controlam as ações dos robôs. A finalidade de cada bloco pode ser identificada usando dicas visuais, como forma, cor e rótulo. Para obter mais informações sobre como trabalhar com o VEXcode GO, consulte a Seção VEXcode GO da Biblioteca VEX.
Os seguintes blocos VEXcode GO serão usados nesta Unidade:
| Blocos VEXcode GO | Comportamentos |
|---|---|
 |
O {When start} bloco começa a executar a pilha de blocos anexada quando o projeto é iniciado. |
 |
O bloco [Drive for] move o sistema de transmissão para frente ou para trás a uma determinada distância. Defina até onde o sistema de transmissão se moverá inserindo um valor no oval. |
![O bloco [Turn for]](/stemlabs/sites/default/files/inline-images/IMG_414BE74E5802-1.jpeg) |
O bloco [Turn for] gira o sistema de transmissão para uma determinada distância. Defina até onde o sistema de transmissão irá girar inserindo um valor no oval. |
![O bloco [Wait]](/stemlabs/sites/default/files/inline-images/IMG_50B404FA3105-1.jpeg) |
O bloco [Wait] aguarda um período de tempo específico antes de passar para o próximo bloco de um projeto. |
 |
O bloco [Definir cor do para-choques] define a cor do para-choque do LED. |