
Die Mars Rover: Surface Operations Unit macht Sie und Ihre Schüler mit der Erstellung von VEXcode GO-Projekten zur Lösung eines Problems vertraut. Die Aktionen des Perseverance Rovers und der Mars 2020-Mission dienen als Inspiration für die Herausforderungen, die die Schüler mit VEXcode GO und der Code Base bewältigen werden. Die von ihnen erstellten Projekte müssen in der richtigen Reihenfolge durchgeführt werden, um Proben zu sammeln und sie zu „vergraben“.
Die NASA-Mission Mars 2020
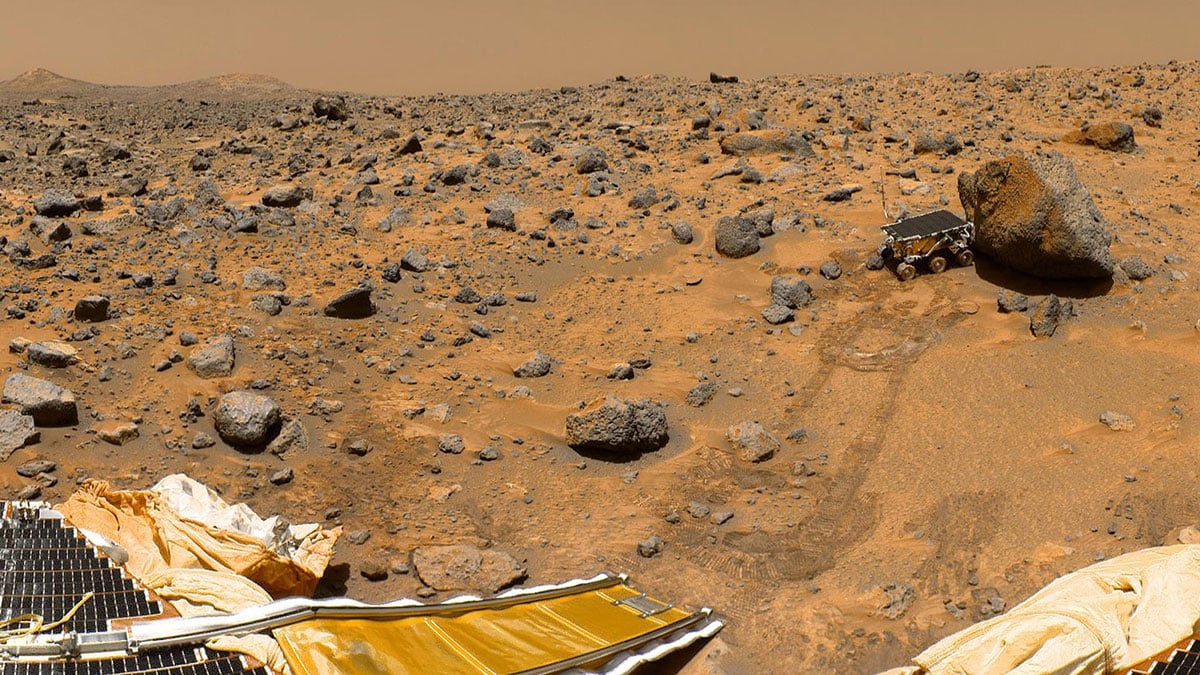
Die NASA-Mission Mars 2020 befasst sich mit vorrangigen wissenschaftlichen Zielen für die Erforschung des Mars: Leben, Klima, Geologie und Menschen. Der Perseverance-Rover wird seine Oberflächenoperationen abschließen, um Daten zu sammeln, die als Grundlage für die Forschung auf dem Roten Planeten dienen.
Was ist ein Rover?
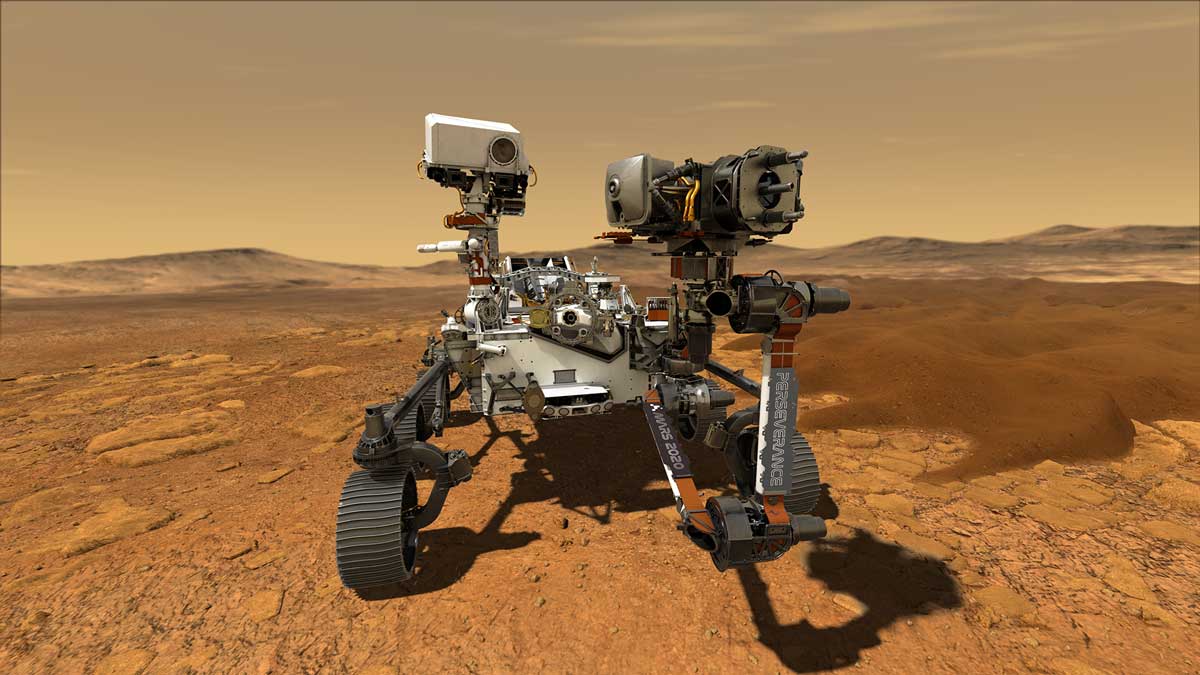
Ein Rover ist ein Gerät, das sich über die feste Oberfläche eines Planeten oder eines anderen Himmelskörpers (wie dem Mond) bewegen soll. Einige Rover sind für den Transport von Mitgliedern einer Raumfahrtbesatzung konzipiert, während andere teilweise oder vollständig autonome Roboter sind. Diese Roboter haben im Allgemeinen die Aufgabe, Informationen über das Gelände zu sammeln und Gesteins-, Schmutz-, Boden- oder sogar Flüssigkeitsproben zu sammeln.
Was sind Oberflächenoperationen?
Oberflächenoperationen sind die wissenschaftlichen Studien, die der Rover auf dem Mars durchführen wird. Diese konzentrieren sich alle auf das Finden, Sammeln und Zwischenspeichern geologischer Proben. Zunächst wird Perseverance nach überzeugenden Steinen suchen. Ein Gestein könnte als überzeugend angesehen werden, wenn es möglicherweise chemische Spuren antiken Lebens bewahrt hat oder durch eine Umgebung verändert wurde, die mikrobielles Leben ermöglichte.
Nach der Identifizierung der überzeugenden Gesteine bohrt Perseverance eine Probe heraus, legt sie in ein versiegeltes Rohr und speichert sie an der Oberfläche. Beim Depot-Caching, das bei dieser Mission verwendet wird, werden mehrere Proben am selben Ort zurückgelassen oder vergraben. Eine zukünftige Mission wird dann in der Lage sein, diese Proben zu bergen und sie alle zusammen an die Wissenschaftler auf der Erde zurückzugeben.
Was ist eine Sequenz?
Eine Sequenz ist die spezifische Reihenfolge, in der Verhaltensweisen ausgeführt werden. Eine Aktion oder ein Ereignis führt zur nächsten geordneten Aktion in einer Sequenz. Die Reihenfolge ist für die Codebasis wichtig, da sich der Roboter nur genau so bewegt, wie es die Befehle ihm vorgeben.
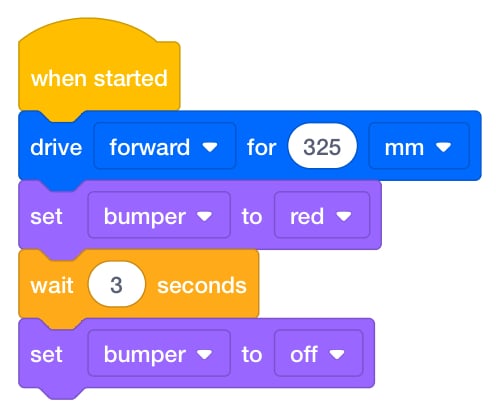
In dieser Animation können Sie sehen, wie das Projekt mit dem {When started} Block oben im Projekt beginnt und dann jeder Block der Reihe nach von oben nach unten ausgeführt wird. Die Codebasis bewegt sich auf einem GO-Feld 325 Millimeter (mm) vorwärts, wartet 2 Sekunden und lässt dann eine Farbe auf dem LED-Stoßfänger leuchten. Das grüne Highlight-Feature um die Blöcke zeigt an, welcher einzelne Block gerade ausgeführt wird. Dies kann Schülern sofortiges Feedback geben, um das Verhalten der Code Base mit bestimmten VEXcode GO-Blöcken zu verknüpfen.
Schritte zum Sequenzieren eines Projekts
- Identifizieren Sie zunächst das Ziel – was muss getan werden? Fahren Sie beispielsweise vom Start bis zur ersten Probe.
Fahren Sie zum Objekt - Teilen Sie dann die Schritte auf, die zum Erreichen des Ziels erforderlich sind, und identifizieren Sie die Blöcke, die zum Erreichen dieser Schritte erforderlich sind. Hier müssen Sie sich 325 Millimeter (mm) vorwärts bewegen, um die Probe zu erreichen, und dann den LED-Stoßsensor so einstellen, dass er rot leuchtet, um anzuzeigen, dass eine Probe gesammelt wird. Warten Sie 3 Sekunden, um die Probe zu sammeln, und verwenden Sie dann den LED-Stoßsensor Glühen stoppen oder ausschalten , um anzuzeigen, dass die Probe entnommen wurde. Dies kann mit den Blöcken [Fahren für], [Warten] und [Bumperfarbe festlegen] erreicht werden.

Blöcke [Fahren auf], [Warten] und [Stoßstangenfarbe festlegen] - Planen Sie als Nächstes den Ablauf des Projekts, indem Sie die passenden Blöcke in den Arbeitsbereich ziehen und von oben nach unten an den {When started} Block anhängen. Wenn jeder Block hinzugefügt wird, ändern Sie die Parameter so, dass sie mit den zuvor aufgeschlüsselten Schritten übereinstimmen.
- Wählen Sie „Start“, um das Projekt zu testen und zu sehen, ob die Code Base das im ersten Schritt festgelegte Ziel erreicht.
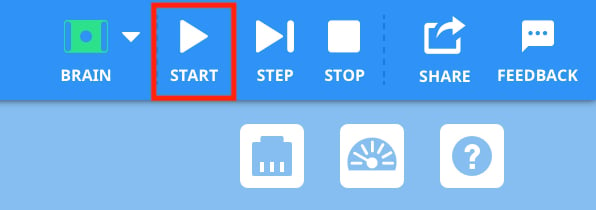
Wählen Sie „Start“
Wenn Sie Ihr Projekt ändern möchten, ändern Sie einfach die Parameter oder fügen Sie Blöcke zum Projekt hinzu oder entfernen Sie sie, bevor Sie den Test erneut durchführen.
Was ist VEXcode GO?
VEXcode GO ist eine Codierungsumgebung, die zur Kommunikation mit VEX GO-Robotern verwendet wird. Schüler nutzen die Drag-and-Drop-Schnittstelle, um VEXcode GO-Projekte zu erstellen, die die Aktionen ihrer Roboter steuern. Der Zweck jedes Blocks kann anhand visueller Hinweise wie Form, Farbe und Beschriftung identifiziert werden. Weitere Informationen zur Arbeit mit VEXcode GO Sie im Abschnitt „VEXcode GO “ der VEX-Bibliothek.
Die folgenden VEXcode GO-Blöcke werden in dieser Einheit verwendet:
| VEXcode GO-Blöcke | Verhaltensweisen |
|---|---|
 |
Der {When start} Block beginnt mit der Ausführung des angehängten Blockstapels, wenn das Projekt gestartet wird. |
 |
Der [Drive for]-Block bewegt den Antriebsstrang um eine bestimmte Strecke vorwärts oder rückwärts. Legen Sie fest, wie weit sich der Antriebsstrang bewegen soll, indem Sie einen Wert in das Oval eingeben. |
![Der [Abbiegen für]-Block](/stemlabs/sites/default/files/inline-images/IMG_414BE74E5802-1.jpeg) |
Der Block [Drehen um] dreht den Antriebsstrang um eine bestimmte Strecke. Stellen Sie ein, wie weit sich der Antriebsstrang drehen soll, indem Sie einen Wert in das Oval eingeben. |
![Der [Warten]-Block](/stemlabs/sites/default/files/inline-images/IMG_50B404FA3105-1.jpeg) |
Der Block [Wait] wartet eine bestimmte Zeit, bevor er zum nächsten Block in einem Projekt wechselt. |
 |
Der Block [Set Bumper Color] legt die Farbe des LED Bumpers fest. |