
L'unité Mars Rover : Surface Operations vous familiarisera, vous et vos étudiants, avec la création de projets VEXcode GO pour résoudre un problème. Les actions du rover Perseverance et de la mission Mars 2020 sont utilisées comme source d'inspiration pour les défis que les étudiants relèveront en utilisant VEXcode GO et la base de code. Les projets qu'ils créent devront être correctement séquencés pour collecter des échantillons et les « enterrer ».
Mission Mars 2020 de la NASA
La mission Mars 2020 de la NASA répond à des objectifs scientifiques hautement prioritaires pour l'exploration de Mars : la vie, le climat, la géologie et les humains. Le rover Perseverance effectuera des opérations de surface pour collecter des données afin d’éclairer la recherche sur la planète rouge.
Qu'est-ce qu'un rover ?
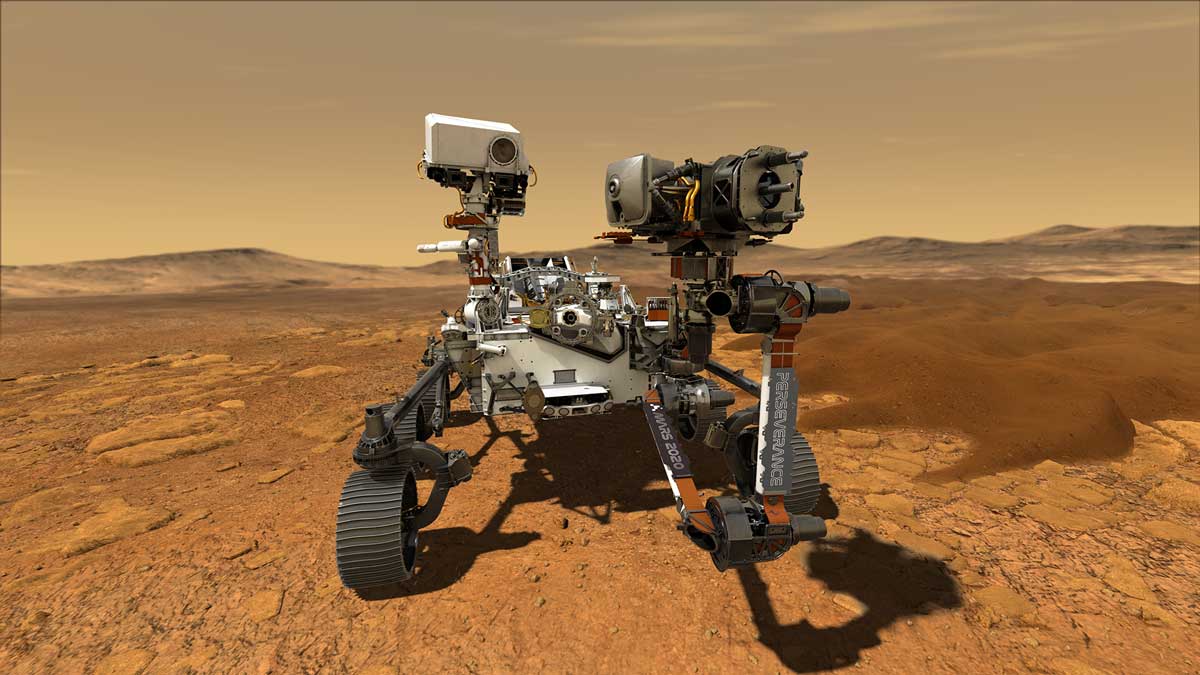
Un rover est un appareil conçu pour se déplacer sur la surface solide d’une planète ou d’un autre corps céleste (comme la Lune). Certains rovers sont conçus pour transporter les membres d’un équipage spatial, tandis que d’autres sont des robots partiellement ou totalement autonomes. Ces robots sont généralement chargés de collecter des informations sur le terrain et de collecter des échantillons de roches, de terre, de terre ou même de liquides.
Que sont les opérations de surface ?
Les opérations de surface sont les études scientifiques que le rover réalisera sur Mars. Ceux-ci sont tous axés sur la recherche, la collecte et la mise en cache d’échantillons géologiques. Pour commencer, Perseverance recherchera des roches convaincantes. Une roche pourrait être considérée comme convaincante si elle a la possibilité d’avoir conservé des traces chimiques d’une vie ancienne ou d’avoir été altérée par un environnement ayant favorisé la vie microbienne.
Après avoir identifié les roches intéressantes, Perseverance prélèvera un échantillon, le placera dans un tube scellé et le cachera à la surface. La mise en cache du dépôt, utilisée au cours de cette mission, est l'endroit où plusieurs échantillons sont laissés ou enterrés au même endroit. Une future mission pourra alors récupérer ces échantillons et les restituer tous ensemble aux scientifiques sur Terre.
Qu'est-ce qu'une séquence ?
Une séquence est l’ordre spécifique dans lequel les comportements sont exécutés. Une action ou un événement mène à l’action ordonnée suivante dans une séquence. Le séquençage est important pour la base de code, car le robot ne se déplacera qu'exactement selon les commandes.
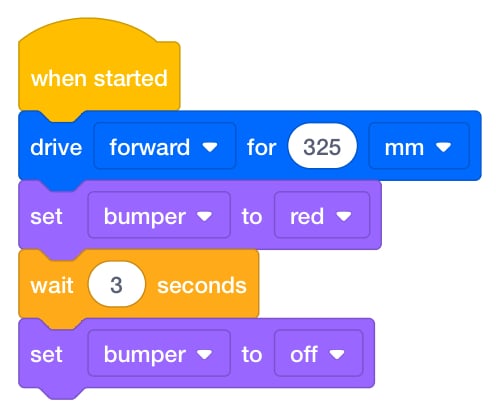
Dans cette animation, vous pouvez voir comment le projet commence avec le bloc {When started} en haut du projet, puis chaque bloc est exécuté dans l'ordre de haut en bas. La base de code avance sur 325 millimètres (mm) sur un GO Field, attend 2 secondes, puis allume une couleur sur le pare-chocs LED. La fonction de surbrillance verte autour des blocs indique quel bloc individuel est en cours d'exécution à ce moment-là. Cela peut fournir aux étudiants un retour immédiat pour connecter les comportements de Code Base avec des blocs VEXcode GO spécifiques.
Étapes pour séquencer un projet
- Tout d’abord, identifiez l’objectif : que faut-il faire ? Par exemple, conduisez du début au premier échantillon.
Conduire jusqu'à l'objet - Ensuite, décomposez les étapes nécessaires pour atteindre l’objectif et identifiez les blocs nécessaires pour accomplir ces étapes. Ici, vous devrez avancer de 325 millimètres (mm) pour atteindre l'échantillon, puis régler le capteur de pare-chocs LED pour qu'il brille en rouge pour montrer qu'il collecte un échantillon, attendez 3 secondes pour collecter l'échantillon, puis faites en sorte que le capteur de pare-chocs LED s'allume en rouge. la lueur s'arrête ou éteint pour indiquer que l'échantillon a été collecté. Cela peut être accompli avec les blocs [Drive for], [Wait] et [Set bumper color].

blocs [Conduire pour], [Attendre] et [Définir la couleur du pare-chocs] - Ensuite, planifiez la séquence du projet en faisant glisser les blocs correspondants dans l'espace de travail et en les attachant au bloc {When started} de haut en bas. Au fur et à mesure que chaque bloc est ajouté, modifiez les paramètres pour qu'ils correspondent aux étapes décrites précédemment.
- Sélectionnez « Démarrer » pour tester le projet et voir si le Code Base atteint l'objectif identifié lors de la première étape.
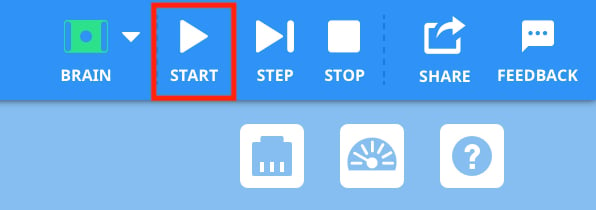
Sélectionnez 'Démarrer'
Si vous souhaitez modifier votre projet, modifiez simplement les paramètres ou ajoutez et supprimez des blocs du projet avant de tester à nouveau.
Qu'est-ce que VEXcode GO ?
VEXcode GO est un environnement de codage utilisé pour communiquer avec les robots VEX GO. Les étudiants utilisent l'interface glisser-déposer pour créer des projets VEXcode GO qui contrôlent les actions de leurs robots. Le but de chaque bloc peut être identifié à l'aide d'indices visuels tels que sa forme, sa couleur et son étiquette. Pour plus d'informations sur la façon de travailler avec VEXcode GO, consultez la section VEXcode GO de la bibliothèque VEX.
Les blocs VEXcode GO suivants seront utilisés dans cette unité :
| Blocs VEXcode GO | Comportements |
|---|---|
 |
Le bloc {When start} commence à exécuter la pile de blocs attachée au démarrage du projet. |
 |
Le bloc [Conduire pour] fait avancer ou reculer la transmission sur une distance donnée. Définissez la distance parcourue par la transmission en entrant une valeur dans l'ovale. |
![Le bloc [Tourner pour]](/stemlabs/sites/default/files/inline-images/IMG_414BE74E5802-1.jpeg) |
Le bloc [Tourner pour] fait tourner la transmission sur une distance donnée. Définissez la distance de rotation de la transmission en entrant une valeur dans l'ovale. |
![Le bloc [Attender]](/stemlabs/sites/default/files/inline-images/IMG_50B404FA3105-1.jpeg) |
Le bloc [Attendre] attend un temps spécifique avant de passer au bloc suivant d'un projet. |
 |
Le bloc [Définir la couleur du pare-chocs] définit la couleur du pare-chocs LED. |