
Mars Rover: Surface Operations Unit จะทำให้คุณและนักเรียนคุ้นเคยกับการสร้างโครงการ VEXcode GO เพื่อแก้ไขปัญหา การกระทำของ Perseverance rover และภารกิจ Mars 2020 ถูกใช้เป็นแรงบันดาลใจสำหรับความท้าทายที่นักเรียนจะต้องเผชิญโดยใช้ VEXcode GO และ Code Base โครงการที่พวกเขาสร้างขึ้นจะต้องได้รับการจัดลำดับอย่างถูกต้องเพื่อรวบรวมตัวอย่างและ 'ฝัง' พวกเขา
ภารกิจ Mars 2020 ของ NASA
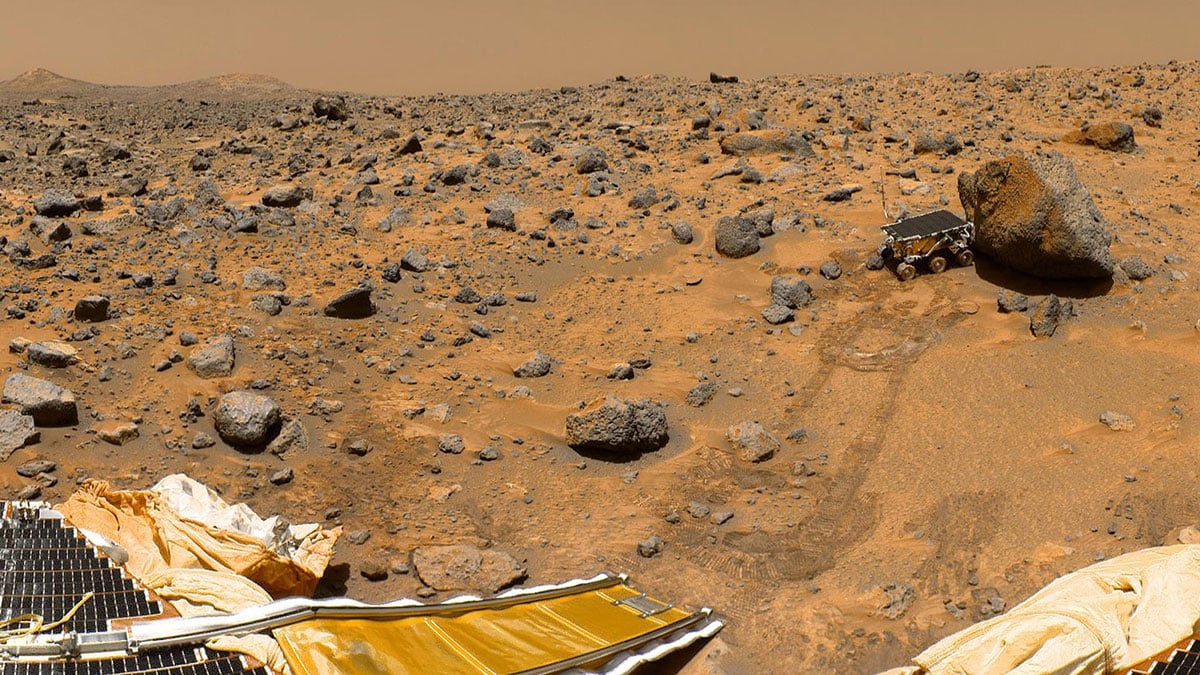
ภารกิจ Mars 2020 ของ NASA กล่าวถึงเป้าหมายทางวิทยาศาสตร์ที่มีลำดับความสำคัญสูงสำหรับการสำรวจดาวอังคาร ซึ่งได้แก่ ชีวิต ภูมิอากาศ ธรณีวิทยา และมนุษย์ ยานสำรวจ Perseverance จะดำเนินการปฏิบัติการบนพื้นผิวให้เสร็จสิ้นเพื่อรวบรวมข้อมูลเพื่อช่วยแจ้งการวิจัยเกี่ยวกับดาวเคราะห์สีแดง
รถแลนด์โรเวอร์คืออะไร?
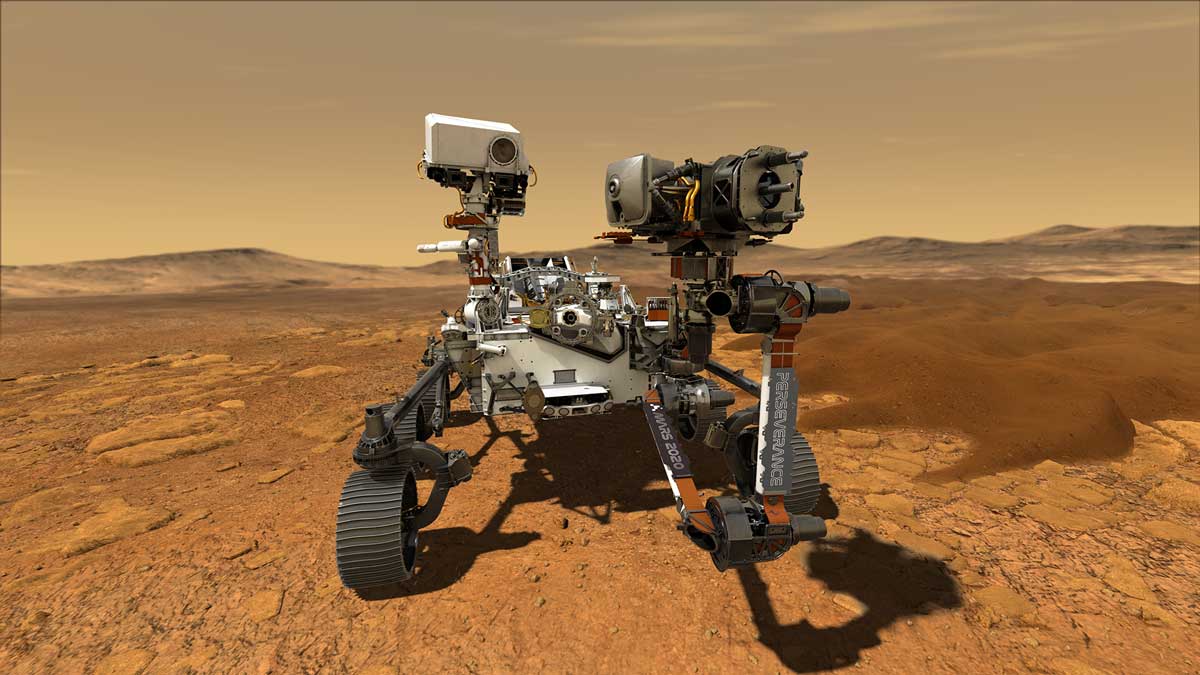
รถแลนด์โรเวอร์คืออุปกรณ์ที่ออกแบบมาเพื่อเคลื่อนที่ผ่านพื้นผิวแข็งของดาวเคราะห์หรือเทห์ฟากฟ้าอื่นๆ (เช่น ดวงจันทร์) รถแลนด์โรเวอร์บางรุ่นได้รับการออกแบบมาเพื่อขนส่งสมาชิกของลูกเรือ ในขณะที่บางรุ่นเป็นหุ่นยนต์อัตโนมัติบางส่วนหรือทั้งหมด โดยทั่วไปหุ่นยนต์เหล่านี้ได้รับมอบหมายให้รวบรวมข้อมูลเกี่ยวกับภูมิประเทศและเก็บตัวอย่างหิน ดิน ดิน หรือแม้แต่ของเหลว
การดำเนินงานพื้นผิวคืออะไร?
ปฏิบัติการบนพื้นผิวเป็นการศึกษาทางวิทยาศาสตร์ที่ยานสำรวจจะทำเสร็จบนดาวอังคาร ทั้งหมดนี้มุ่งเน้นไปที่การค้นหา การรวบรวม และแคชตัวอย่างทางธรณีวิทยา ในการเริ่มต้น ความเพียรจะมองหาหินที่น่าสนใจ หินอาจถือได้ว่าน่าสนใจหากมีความเป็นไปได้ที่จะรักษาร่องรอยทางเคมีของชีวิตโบราณไว้ หรือถูกเปลี่ยนแปลงโดยสภาพแวดล้อมที่รองรับชีวิตของจุลินทรีย์
หลังจากระบุหินที่น่าสนใจได้แล้ว Perseverance จะเจาะตัวอย่างออกมา ใส่ไว้ในท่อที่ปิดสนิท และแคชไว้บนพื้นผิว การแคชดีโปซึ่งใช้ในภารกิจนี้คือที่ซึ่งตัวอย่างหลายรายการถูกทิ้งหรือฝังไว้ที่ตำแหน่งเดียวกัน ภารกิจในอนาคตจะสามารถเก็บตัวอย่างเหล่านี้และส่งคืนทั้งหมดให้กับนักวิทยาศาสตร์บนโลก
ลำดับคืออะไร?
ลำดับคือลำดับเฉพาะในการดำเนินการพฤติกรรม การกระทำหรือเหตุการณ์นำไปสู่การกระทำลำดับถัดไปในลำดับ การจัดลำดับเป็นสิ่งสำคัญสำหรับ Code Base เนื่องจากหุ่นยนต์จะเคลื่อนที่ตามที่คำสั่งบอกเท่านั้น
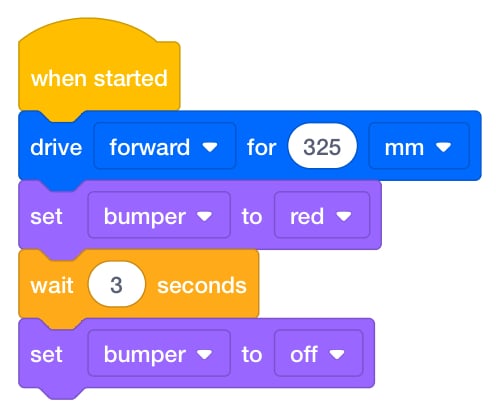
ในแอนิเมชั่นนี้ คุณจะเห็นว่าโปรเจ็กต์เริ่มต้นด้วยบล็อก {When started} ที่ด้านบนของโปรเจ็กต์อย่างไร จากนั้นแต่ละบล็อกจะดำเนินการตามลำดับจากบนลงล่าง Code Base ขับเคลื่อนไปข้างหน้าเป็นระยะทาง 325 มิลลิเมตร (มม.) บน GO Field รอ 2 วินาที จากนั้นจะเรืองแสงสีบนกันชน LED คุณลักษณะไฮไลต์สีเขียวรอบๆ บล็อกจะระบุว่าแต่ละบล็อกใดกำลังทำงานอยู่ในขณะนั้น สิ่งนี้สามารถให้ข้อเสนอแนะแก่นักเรียนได้ทันทีเพื่อเชื่อมโยงพฤติกรรมของโค้ดฐาน กับบล็อก VEXcode GO เฉพาะ
ขั้นตอนในการจัดลำดับโครงการ
- ขั้นแรก ให้ระบุเป้าหมาย—ต้องทำอะไร? เช่น ขับรถจากจุดเริ่มต้นไปจนถึงตัวอย่างแรก
ขับไปที่วัตถุ - จากนั้น แจกแจงขั้นตอนที่จำเป็นเพื่อให้บรรลุเป้าหมาย และระบุอุปสรรคที่จำเป็นในการบรรลุเป้าหมายเหล่านี้ ที่นี่คุณจะต้องเคลื่อนที่ไปข้างหน้า 325 มิลลิเมตร (มม.) เพื่อไปถึงตัวอย่าง จากนั้นตั้งค่า LED Bumper Sensor ให้เรืองแสงสีแดงเพื่อแสดงว่ากำลังเก็บตัวอย่าง รอ 3 วินาทีเพื่อเก็บตัวอย่าง จากนั้นมี LED Bumper Sensor หยุดเรืองแสงหรือปิด เพื่อระบุว่าเก็บตัวอย่างแล้ว ซึ่งสามารถทำได้โดยใช้บล็อก [ขับไป], [รอ] และ [ตั้งค่าสีกันชน]

[ขับไป], [รอ] และ [ตั้งค่าสีกันชน] บล็อก - ถัดไป วางแผนลำดับของโปรเจ็กต์โดยการลากบล็อกที่ตรงกันลงในพื้นที่ทำงาน และแนบเข้ากับบล็อก {When started} จากบนลงล่าง เมื่อเพิ่มแต่ละบล็อก ให้เปลี่ยนพารามิเตอร์ให้ตรงกับขั้นตอนที่แยกย่อยก่อนหน้านี้
- เลือก "Start" เพื่อทดสอบโครงการและดูว่า Code Base บรรลุเป้าหมายที่ระบุไว้ในขั้นตอนแรกหรือไม่
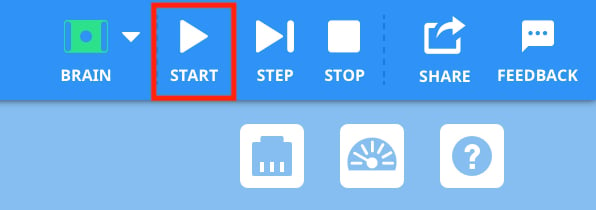
เลือก 'เริ่ม'
หากคุณต้องการเปลี่ยนโปรเจ็กต์ของคุณ เพียงเปลี่ยนพารามิเตอร์ หรือเพิ่มและลบบล็อกออกจากโปรเจ็กต์ก่อนที่จะทดสอบอีกครั้ง
VEXcode GO คืออะไร?
VEXcode GO เป็นสภาพแวดล้อมการเขียนโค้ดที่ใช้ในการสื่อสารกับหุ่นยนต์ VEX GO นักเรียนใช้อินเทอร์เฟซแบบลากและวางเพื่อสร้างโปรเจ็กต์ VEXcode GO ที่ควบคุมการทำงานของโรบ็อตของตน จุดประสงค์ของแต่ละบล็อกสามารถระบุได้โดยใช้ภาพ เช่น รูปร่าง สี และฉลาก สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการทำงานกับ VEXcode GO โปรดดู VEXcode GO ส่วนของ VEX Library
บล็อก VEXcode GO ต่อไปนี้จะถูกนำมาใช้ในหน่วยนี้:
| บล็อก VEXcode GO | พฤติกรรม |
|---|---|
 |
บล็อก {When start} เริ่มรันสแต็กบล็อกที่แนบมาเมื่อเริ่มต้นโปรเจ็กต์ |
 |
บล็อก [Drive for] จะเคลื่อนระบบขับเคลื่อนไปข้างหน้าหรือถอยหลังตามระยะทางที่กำหนด กำหนดระยะที่ระบบขับเคลื่อนจะเคลื่อนที่โดยการป้อนค่าลงในวงรี |
![บล็อก [เลี้ยวเพื่อ]](/stemlabs/sites/default/files/inline-images/IMG_414BE74E5802-1.jpeg) |
บล็อก [เลี้ยวเพื่อ] จะเปลี่ยนระบบขับเคลื่อนตามระยะทางที่กำหนด ตั้งค่าระยะที่ระบบขับเคลื่อนจะเลี้ยวโดยการป้อนค่าลงในวงรี |
![บล็อก [รอ]](/stemlabs/sites/default/files/inline-images/IMG_50B404FA3105-1.jpeg) |
บล็อก [Wait] รอตามระยะเวลาที่กำหนดก่อนจะย้ายไปยังบล็อกถัดไปในโปรเจ็กต์ |
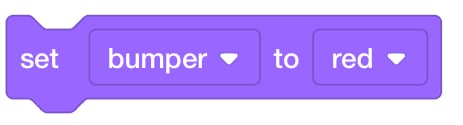 |
บล็อก [ตั้งค่าสีกันชน] กำหนดสีของกันชน LED |