الدرس 1: ما هي الخوارزمية ؟
في هذا الدرس، ستتعلم ما هي الخوارزمية وكيف يمكّنك استخدام الخوارزميات في VEXcode VR من إنشاء مشاريع VEXcode VR بسلوكيات أكثر تنوعًا. توجه المشاريع الخوارزمية روبوت الواقع الافتراضي للاستجابة لبيئته، والتي ستكون ضرورية لحل تحدي كسارة القلعة الديناميكية.
مخرجات التعلم
- حدد أن الخوارزميات تتكون من التسلسل والاختيار والحلقات.
- حدد أن الخوارزميات هي تسلسلات دقيقة من التعليمات، يتم تنفيذها باستخدام لغات البرمجة، للعمليات التي سيتم تنفيذها بواسطة روبوت الواقع الافتراضي.
الخوارزميات
الخوارزميات هي تسلسلات دقيقة من التعليمات، يتم تنفيذها باستخدام لغات البرمجة، مثل VEXcode VR، للعمليات التي سيتم تنفيذها بواسطة روبوت VR.
العناصر الأساسية للخوارزمية هي التسلسل والاختيار والتكرار.
- التسلسل - الترتيب الذي يتم به دمج السلوكيات والأوامر في مشروع من أجل تحقيق النتيجة المرجوة.
- الاختيار - هو استخدام العبارات الشرطية في المشروع. تؤثر العبارات الشرطية مثل [إذا كان الأمر كذلك]، أو [إذا كان الأمر كذلك] على تدفق مشروع VEXcode VR.
- التكرار - غالبًا ما تستخدم الخوارزميات التكرار لتنفيذ الخطوات لعدد معين من المرات، أو حتى يتم استيفاء شرط معين. يُعرف هذا أيضًا باسم "التكرار الحلقي". يمكن أن يغير التكرار تدفق المشروع عن طريق تكرار سلوك عدد محدد من المرات أو حتى يتم استيفاء شرط.
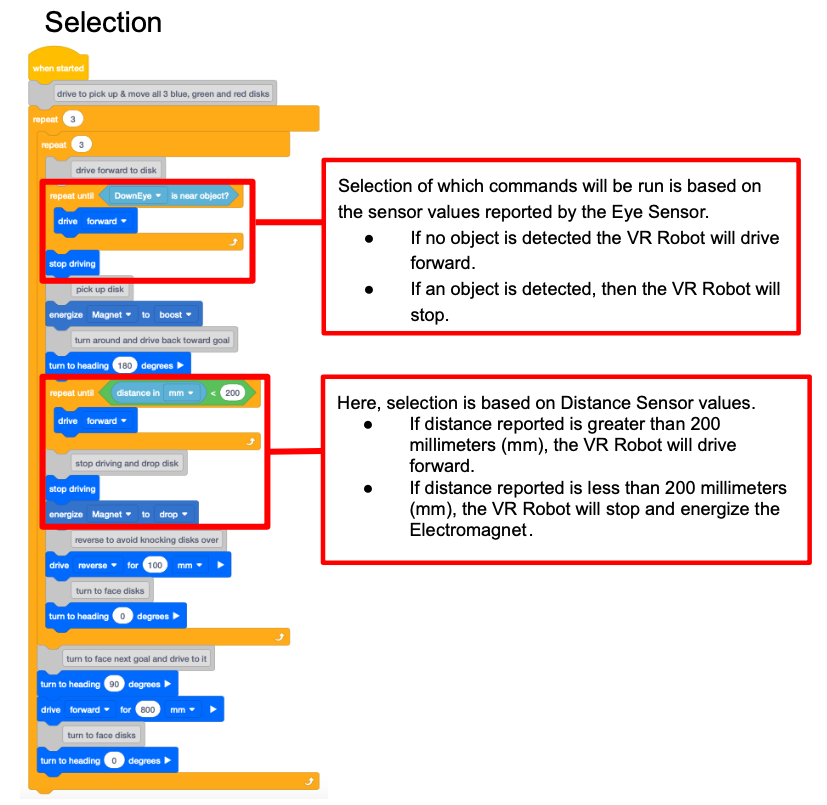
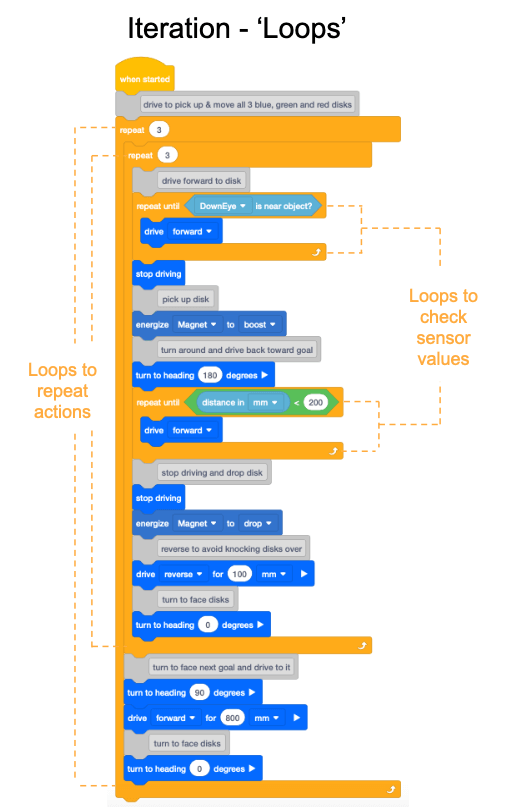
هذا المشروع التوضيحي من تحدي الوحدة 8 هو مثال على الخوارزمية. يتضمن مجموعة من الحلقات وبيانات المستشعر والأوامر الموضوعة معًا في تسلسل لحل تحدي محرك الأقراص.
يستخدم المشروع التكرار أو "الحلقات" لتكرار الإجراءات والتحقق من قيم المستشعر المبلغ عنها.
تحدد طريقة تسلسل الأوامر وتجميعها سلوكيات روبوت الواقع الافتراضي. يتضمن هذا المشروع أيضًا اختيارًا يحدد أجزاء المشروع التي يتم تشغيلها بناءً على حالة المستشعر.