Lezione 1: Che cos'è un algoritmo?
In questa lezione, imparerai cos'è un algoritmo e come l'utilizzo di algoritmi in VEXcode VR ti consente di creare progetti VEXcode VR con comportamenti più diversificati. I progetti algoritmici istruiscono il robot VR a rispondere al suo ambiente, che sarà necessario per risolvere la Dynamic Castle Crasher Challenge.
Risultati di apprendimento
- Identifica che gli algoritmi sono costituiti da sequenza, selezione e loop.
- Identificare che gli algoritmi sono sequenze precise di istruzioni, implementate utilizzando linguaggi di programmazione, per i processi che devono essere eseguiti da un robot VR.
Algoritmi
Gli algoritmi sono sequenze precise di istruzioni, implementate utilizzando linguaggi di programmazione, come VEXcode VR, per i processi che devono essere eseguiti da un robot VR.
Gli elementi di base di un algoritmo sono sequenza, selezione e iterazione.
- Sequenza - l'ordine in cui comportamenti e comandi sono combinati in un progetto al fine di produrre un risultato desiderato.
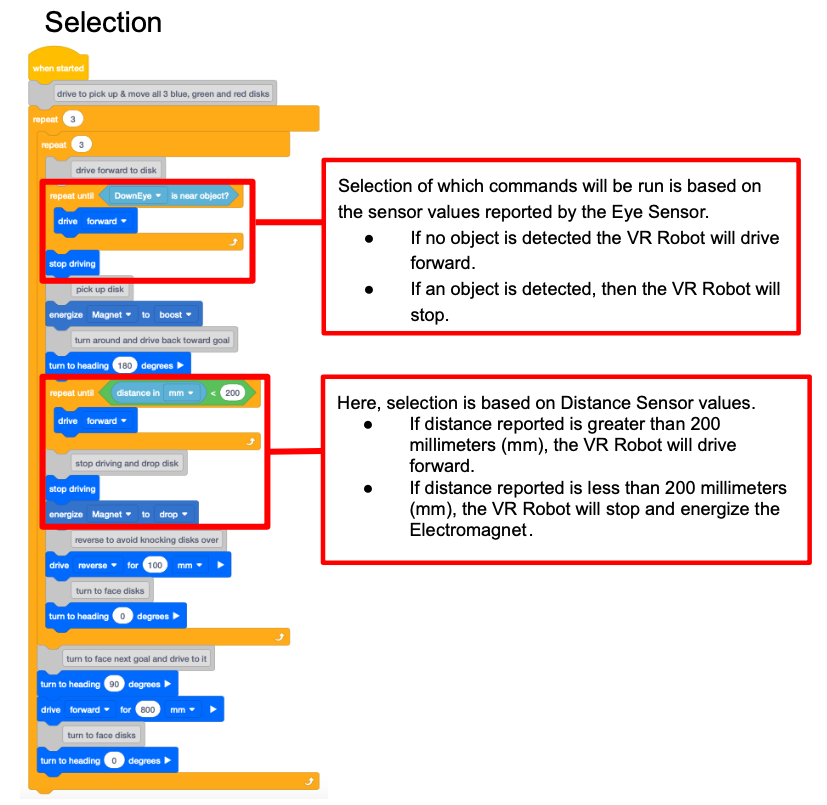
- Selezione - è l'uso di dichiarazioni condizionali in un progetto. Le dichiarazioni condizionali come [If then] o [If then else] influenzano il flusso di progetto di un progetto VEXcode VR.
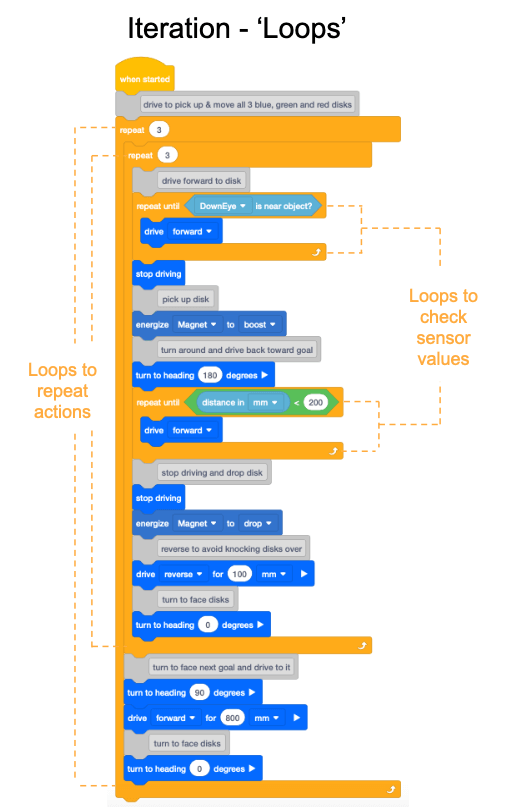
- Iterazione : gli algoritmi utilizzano spesso la ripetizione per eseguire passaggi un certo numero di volte o fino a quando non viene soddisfatta una determinata condizione. Questo è anche noto come "looping". L'iterazione può modificare il flusso del progetto ripetendo un comportamento un numero specificato di volte o fino a quando non viene soddisfatta una condizione.
Questo progetto esemplificativo della sfida dell'Unità 8 è un esempio di algoritmo. Include una combinazione di loop, dati del sensore e comandi messi insieme in una sequenza per risolvere la Disk Mover Challenge.
Il progetto utilizza l'iterazione o "loop" per ripetere le azioni e controllare i valori del sensore riportati.
Il modo in cui i comandi sono sequenziati e combinati determina i comportamenti del robot VR. Questo progetto include anche la selezione che determina le parti del progetto che vengono eseguite in base alla condizione del sensore.