पाठ 1: एल्गोरिदम क्या है?
इस पाठ में, आप सीखेंगे कि एल्गोरिदम क्या है और VEXcode VR में एल्गोरिदम का उपयोग करने से आप अधिक विविध व्यवहारों के साथ VEXcode VR प्रोजेक्ट कैसे बना सकते हैं। एल्गोरिदम परियोजनाएं वीआर रोबोट को अपने वातावरण के अनुसार प्रतिक्रिया करने का निर्देश देती हैं, जो डायनेमिक कैसल क्रैशर चैलेंज को हल करने के लिए आवश्यक होगा।
सीखने के परिणाम
- पहचानें कि एल्गोरिदम अनुक्रम, चयन और लूप से बने होते हैं।
- पहचानें कि एल्गोरिदम निर्देशों का सटीक अनुक्रम है, जो वीआर रोबोट द्वारा की जाने वाली प्रक्रियाओं के लिए प्रोग्रामिंग भाषाओं का उपयोग करके कार्यान्वित किया जाता है।
एल्गोरिदम
एल्गोरिदम निर्देशों का सटीक अनुक्रम है, जिसे VR रोबोट द्वारा की जाने वाली प्रक्रियाओं के लिए VEXcode VR जैसी प्रोग्रामिंग भाषाओं का उपयोग करके क्रियान्वित किया जाता है।
किसी एल्गोरिथ्म के मूल तत्व अनुक्रम, चयन और पुनरावृत्ति हैं।
- अनुक्रम - वह क्रम जिसमें वांछित परिणाम प्राप्त करने के लिए किसी परियोजना में व्यवहार और आदेशों को संयोजित किया जाता है।
- चयन - एक परियोजना में सशर्त बयानों का उपयोग है। सशर्त कथन जैसे कि [यदि तो], या [यदि तो अन्यथा] VEXcode VR परियोजना के परियोजना प्रवाह को प्रभावित करते हैं।
- पुनरावृत्ति - एल्गोरिदम अक्सर चरणों को एक निश्चित संख्या में निष्पादित करने के लिए, या एक निश्चित शर्त पूरी होने तक पुनरावृत्ति का उपयोग करते हैं। इसे "लूपिंग" के नाम से भी जाना जाता है। पुनरावृत्ति किसी व्यवहार को निर्दिष्ट संख्या में बार-बार दोहराकर या किसी शर्त के पूरा होने तक परियोजना प्रवाह को बदल सकती है।
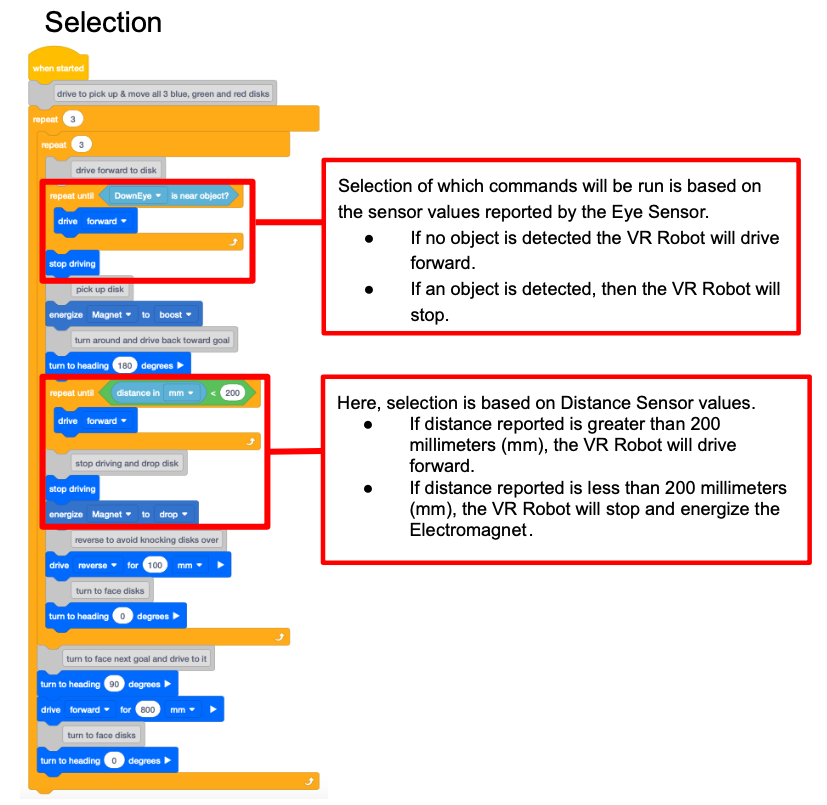
यूनिट 8 चुनौती से यह उदाहरण परियोजना एक एल्गोरिथ्म का उदाहरण है। इसमें डिस्क मूवर चैलेंज को हल करने के लिए लूप्स, सेंसर डेटा और कमांड्स का संयोजन शामिल है, जिन्हें एक क्रम में रखा गया है।
यह परियोजना क्रियाओं को दोहराने और रिपोर्ट किए गए सेंसर मानों की जांच करने के लिए पुनरावृत्ति या “लूप” का उपयोग करती है।
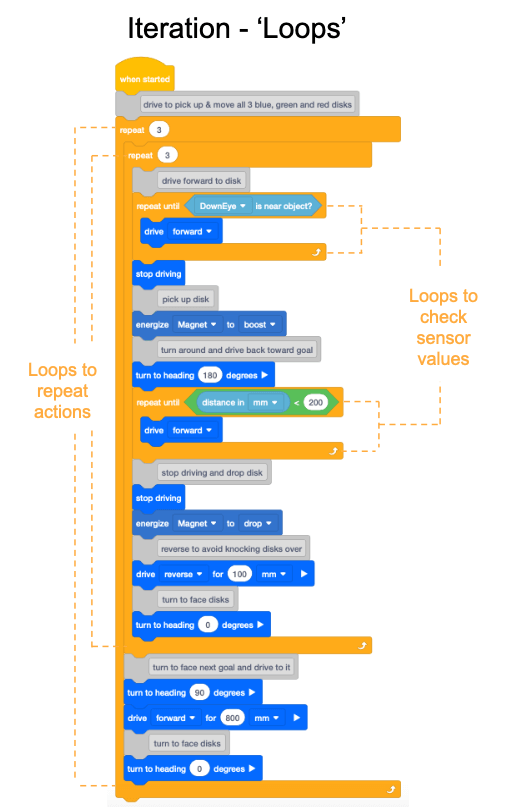
आदेशों को जिस प्रकार क्रमबद्ध और संयोजित किया जाता है, वह VR रोबोट के व्यवहार को निर्धारित करता है। इस परियोजना में चयन भी शामिल है जो सेंसर की स्थिति के आधार पर परियोजना के उन भागों को निर्धारित करता है जो चलाए जाएंगे।