
പാഠം 1: ഒരു അൽഗോരിതം എന്താണ്?
ഈ പാഠത്തിൽ, ഒരു അൽഗോരിതം എന്താണെന്നും VEXcode VR-ൽ അൽഗോരിതങ്ങൾ ഉപയോഗിക്കുന്നത് കൂടുതൽ വൈവിധ്യമാർന്ന പെരുമാറ്റങ്ങളുള്ള VEXcode VR പ്രോജക്റ്റുകൾ സൃഷ്ടിക്കാൻ നിങ്ങളെ എങ്ങനെ പ്രാപ്തമാക്കുന്നുവെന്നും നിങ്ങൾ പഠിക്കും. ഡൈനാമിക് കാസിൽ ക്രാഷർ ചലഞ്ച് പരിഹരിക്കുന്നതിന് ആവശ്യമായ പരിസ്ഥിതിയോട് പ്രതികരിക്കാൻ അൽഗോരിതമിക് പ്രോജക്ടുകൾ വിആർ റോബോട്ടിനെ നിർദ്ദേശിക്കുന്നു.
പഠന ഫലങ്ങൾ
- അൽഗോരിതങ്ങൾ ക്രമം, തിരഞ്ഞെടുപ്പ്, ലൂപ്പുകൾ എന്നിവയാൽ നിർമ്മിതമാണെന്ന് തിരിച്ചറിയുക.
- ഒരു VR റോബോട്ട് നടപ്പിലാക്കുന്ന പ്രക്രിയകൾക്കായി പ്രോഗ്രാമിംഗ് ഭാഷകൾ ഉപയോഗിച്ച് നടപ്പിലാക്കുന്ന നിർദ്ദേശങ്ങളുടെ കൃത്യമായ ക്രമങ്ങളാണ് അൽഗോരിതങ്ങൾ എന്ന് തിരിച്ചറിയുക.
അൽഗോരിതങ്ങൾ
ഒരു VR റോബോട്ട് നടപ്പിലാക്കുന്ന പ്രക്രിയകൾക്കായി VEXcode VR പോലുള്ള പ്രോഗ്രാമിംഗ് ഭാഷകൾ ഉപയോഗിച്ച് നടപ്പിലാക്കുന്ന നിർദ്ദേശങ്ങളുടെ കൃത്യമായ ശ്രേണികളാണ് അൽഗോരിതങ്ങൾ.
ഒരു അൽഗോരിതത്തിന്റെ അടിസ്ഥാന ഘടകങ്ങൾ ക്രമം, തിരഞ്ഞെടുപ്പ്, ആവർത്തനം എന്നിവയാണ്.
- അനുക്രമം - ഒരു പ്രോജക്റ്റിൽ ആവശ്യമുള്ള ഫലം ലഭിക്കുന്നതിനായി പെരുമാറ്റങ്ങളും കമാൻഡുകളും സംയോജിപ്പിക്കുന്ന ക്രമം.
- തിരഞ്ഞെടുപ്പ് - ഒരു പ്രോജക്റ്റിൽ കണ്ടീഷണൽ പ്രസ്താവനകളുടെ ഉപയോഗമാണ്. [അപ്പോൾ ആണെങ്കിൽ], അല്ലെങ്കിൽ [അപ്പോൾ മറ്റെന്തെങ്കിലും ആണെങ്കിൽ] പോലുള്ള കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ ഒരു VEXcode VR പ്രോജക്റ്റിന്റെ പ്രോജക്റ്റ് ഫ്ലോയെ ബാധിക്കുന്നു.
- ആവർത്തനം - അൽഗോരിതങ്ങൾ പലപ്പോഴും ഒരു നിശ്ചിത എണ്ണം തവണ ഘട്ടങ്ങൾ നടപ്പിലാക്കുന്നതിനോ അല്ലെങ്കിൽ ഒരു പ്രത്യേക വ്യവസ്ഥ പാലിക്കുന്നതുവരെയോ ആവർത്തനം ഉപയോഗിക്കുന്നു. ഇത് "ലൂപ്പിംഗ്" എന്നും അറിയപ്പെടുന്നു. ഒരു വ്യവസ്ഥ പാലിക്കുന്നത് വരെ അല്ലെങ്കിൽ ഒരു നിശ്ചിത എണ്ണം തവണ ഒരു സ്വഭാവം ആവർത്തിച്ചുകൊണ്ട് ആവർത്തനത്തിന് പ്രോജക്റ്റ് ഫ്ലോ മാറ്റാൻ കഴിയും.
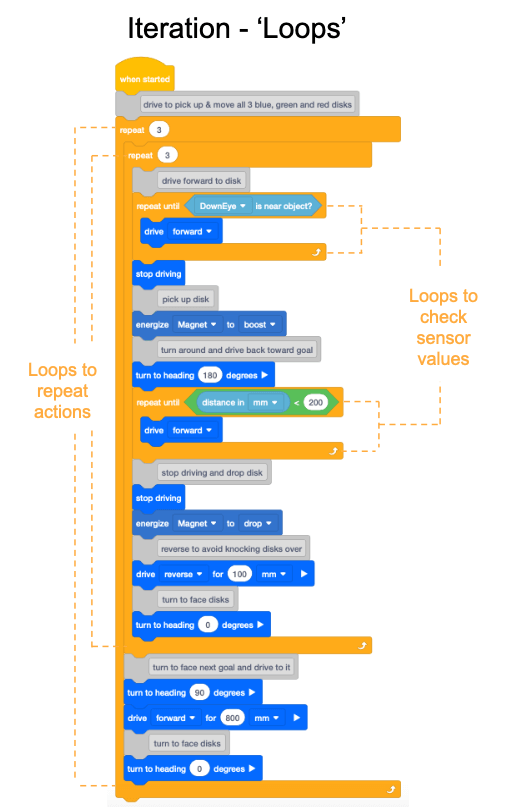
യൂണിറ്റ് 8 ചലഞ്ചിൽ നിന്നുള്ള ഈ ഉദാഹരണ പ്രോജക്റ്റ് ഒരു അൽഗോരിതത്തിന്റെ ഒരു ഉദാഹരണമാണ്. ഡിസ്ക് മൂവർ ചലഞ്ച് പരിഹരിക്കുന്നതിനായി ലൂപ്പുകൾ, സെൻസർ ഡാറ്റ, കമാൻഡുകൾ എന്നിവയുടെ സംയോജനം ഒരു ശ്രേണിയിൽ ഒരുമിച്ച് ചേർക്കുന്നത് ഇതിൽ ഉൾപ്പെടുന്നു.
പ്രവർത്തനങ്ങൾ ആവർത്തിക്കുന്നതിനും റിപ്പോർട്ട് ചെയ്ത സെൻസർ മൂല്യങ്ങൾ പരിശോധിക്കുന്നതിനും പ്രോജക്റ്റ് ആവർത്തനം അല്ലെങ്കിൽ "ലൂപ്പുകൾ" ഉപയോഗിക്കുന്നു.
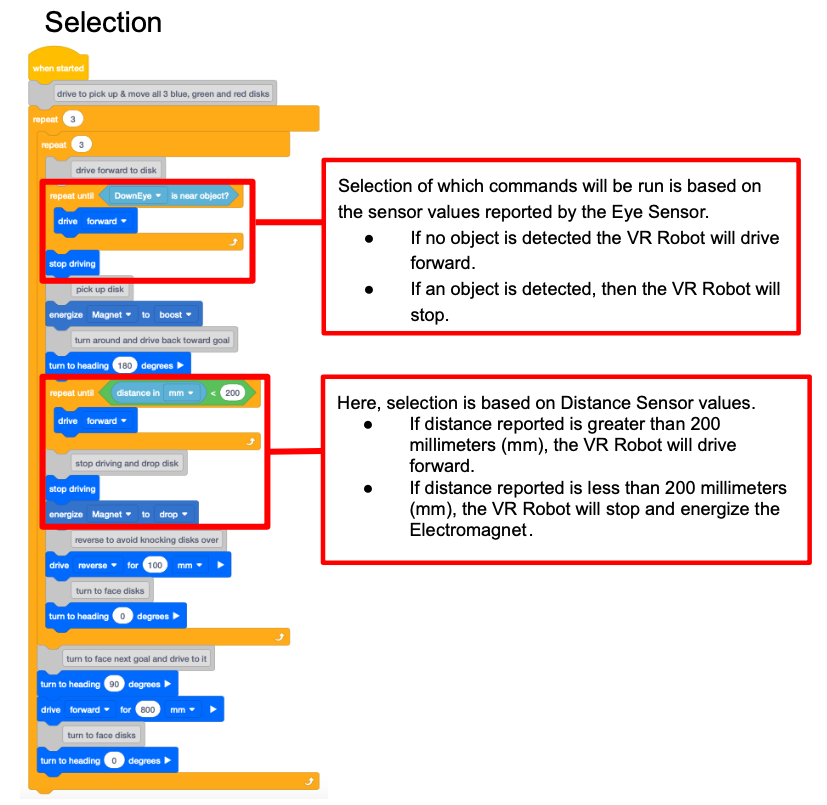
കമാൻഡുകൾ ക്രമീകരിച്ചിരിക്കുന്നതും സംയോജിപ്പിക്കുന്നതും VR റോബോട്ടിന്റെ സ്വഭാവരീതികളെ നിർണ്ണയിക്കുന്നു. സെൻസർ അവസ്ഥയെ അടിസ്ഥാനമാക്കി പ്രവർത്തിപ്പിക്കേണ്ട പ്രോജക്റ്റിന്റെ ഭാഗങ്ങൾ നിർണ്ണയിക്കുന്ന തിരഞ്ഞെടുപ്പും ഈ പ്രോജക്റ്റിൽ ഉൾപ്പെടുന്നു.
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.