
Lição 1: O que é um algoritmo?
Nesta lição, você aprenderá o que é um algoritmo e como o uso de algoritmos no VEXcode VR permite criar projetos VEXcode VR com comportamentos mais diversos. Projetos algorítmicos instruem o Robô de RV a responder ao seu ambiente, o que será necessário para resolver o Desafio Dinâmico de Castle Crasher.
Resultados de Aprendizagem
- Identifique que os algoritmos são compostos de sequência, seleção e loops.
- Identificar que algoritmos são sequências precisas de instruções, implementadas utilizando linguagens de programação, para processos a serem realizados por um Robô de RV.
Algoritmos
Algoritmos são sequências precisas de instruções, implementadas usando linguagens de programação, como o VEXcode VR, para processos a serem realizados por um Robô VR.
Os elementos básicos de um algoritmo são sequência, seleção e iteração.
- Sequência - a ordem em que os comportamentos e comandos são combinados em um projeto para produzir um resultado desejado.
- Seleção - é o uso de declarações condicionais num projeto. Declarações condicionais como [If then] ou [If then else] afetam o fluxo do projeto de um projeto VEXcode VR.
- Iteração - os algoritmos geralmente usam repetição para executar etapas um certo número de vezes ou até que uma determinada condição seja atendida. Isso também é conhecido como "looping". A iteração pode alterar o fluxo do projeto repetindo um comportamento um número especificado de vezes ou até que uma condição seja atendida.
Este projeto de exemplo do desafio da Unidade 8 é um exemplo de um algoritmo. Ele inclui uma combinação de loops, dados do sensor e comandos reunidos em sequência para resolver o Desafio do Movimentador de Disco.
O projeto usa iteração ou "loops" para repetir ações e verificar os valores dos sensores relatados.
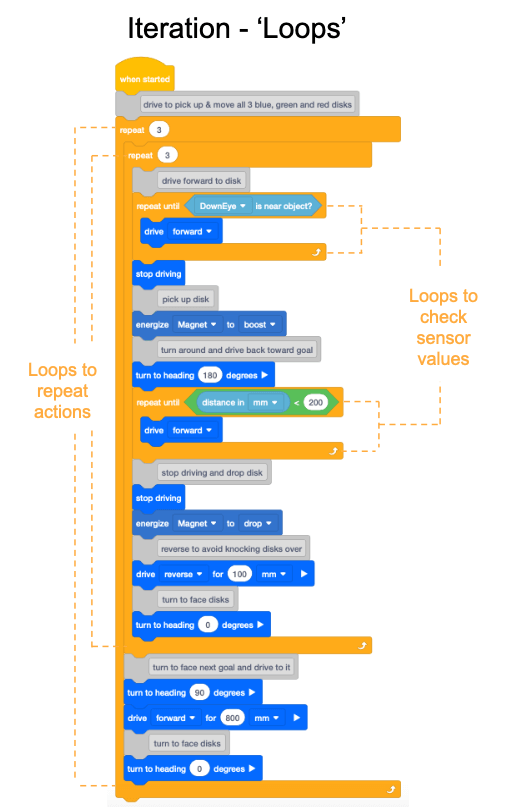
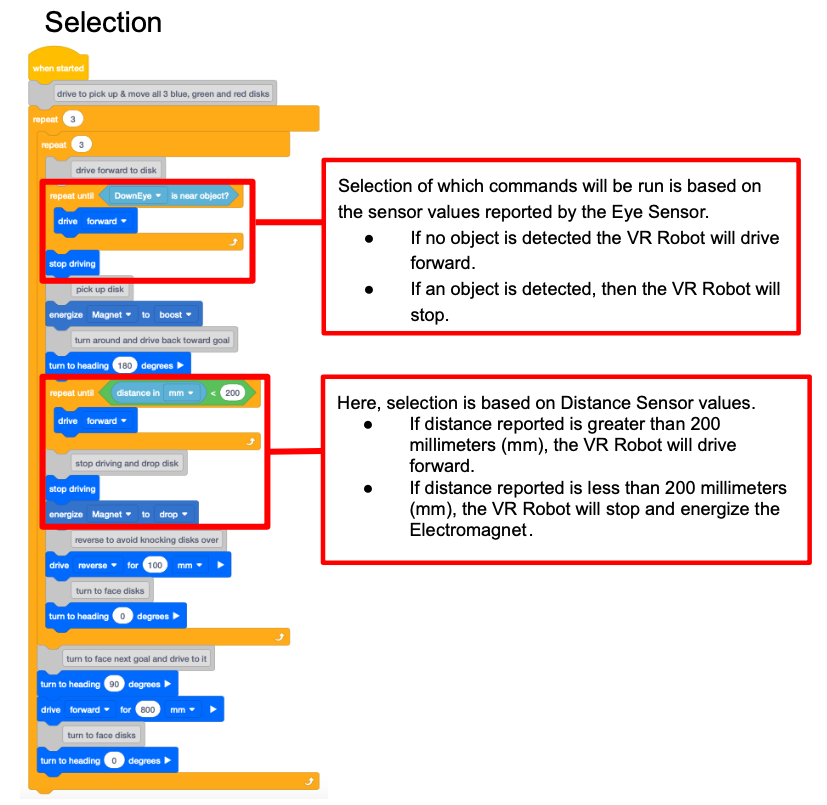
A maneira como os comandos são sequenciados e combinados determina os comportamentos do Robô VR. Este projeto também inclui a seleção que determina as partes do projeto que são executadas com base na condição do sensor.
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf