บทที่ 1: อัลกอริทึมคืออะไร?
ในบทเรียนนี้คุณจะได้เรียนรู้ว่าอัลกอริทึมคืออะไรและการใช้อัลกอริทึมใน VEXcode VR ช่วยให้คุณสามารถสร้างโครงการ VEXcode VR ที่มีพฤติกรรมที่หลากหลายมากขึ้นได้อย่างไร โครงการอัลกอริทึมสั่งให้หุ่นยนต์ VR ตอบสนองต่อสภาพแวดล้อมซึ่งจำเป็นต่อการแก้ปัญหา Dynamic Castle Crasher Challenge
ผลการเรียนรู้
- ระบุว่าอัลกอริทึมประกอบด้วยลำดับการเลือกและลูป
- ระบุว่าอัลกอริทึมเป็นลำดับคำสั่งที่แม่นยำซึ่งนำไปใช้โดยใช้ภาษาโปรแกรมสำหรับกระบวนการที่จะดำเนินการโดยหุ่นยนต์ VR
อัลกอริทึม
อัลกอริทึมเป็นลำดับคำสั่งที่แม่นยำซึ่งใช้งานโดยใช้ภาษาโปรแกรมเช่น VEXcode VR สำหรับกระบวนการที่จะดำเนินการโดยหุ่นยนต์ VR
องค์ประกอบพื้นฐานของอัลกอริทึมคือลำดับการเลือกและการทำซ้ำ
- ลำดับ - ลำดับที่พฤติกรรมและคำสั่งถูกรวมเข้าด้วยกันในโครงการเพื่อสร้างผลลัพธ์ที่ต้องการ
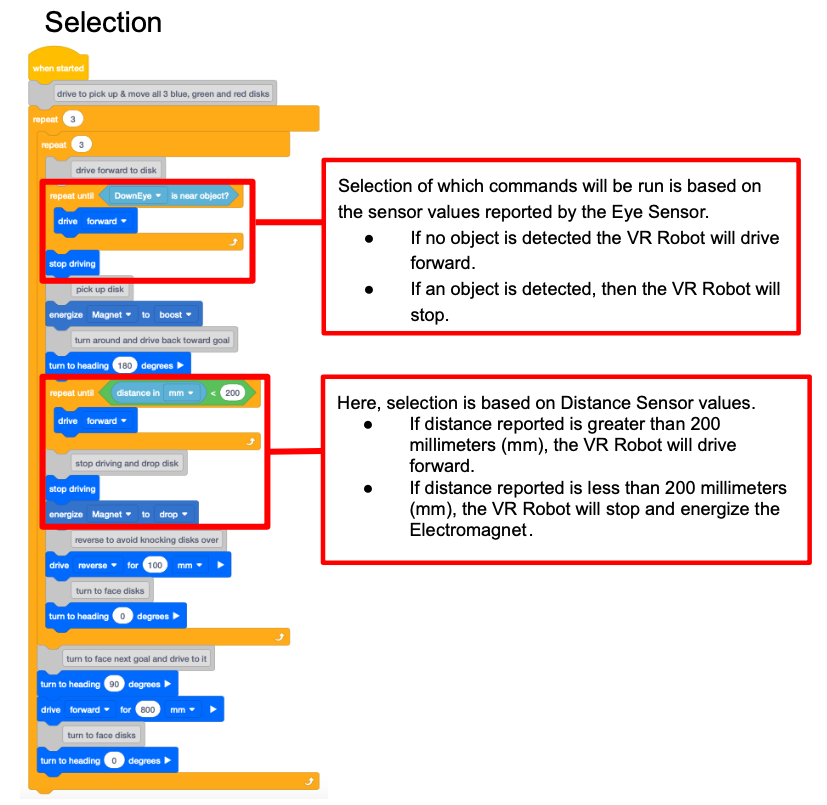
- การคัดเลือก - คือการใช้ข้อความที่มีเงื่อนไขในโครงการ ข้อความแบบมีเงื่อนไขเช่น [ถ้าเป็นเช่นนั้น] หรือ [ถ้าเป็นเช่นนั้น] ส่งผลกระทบต่อการไหลของโครงการของโครงการ VEXcode VR
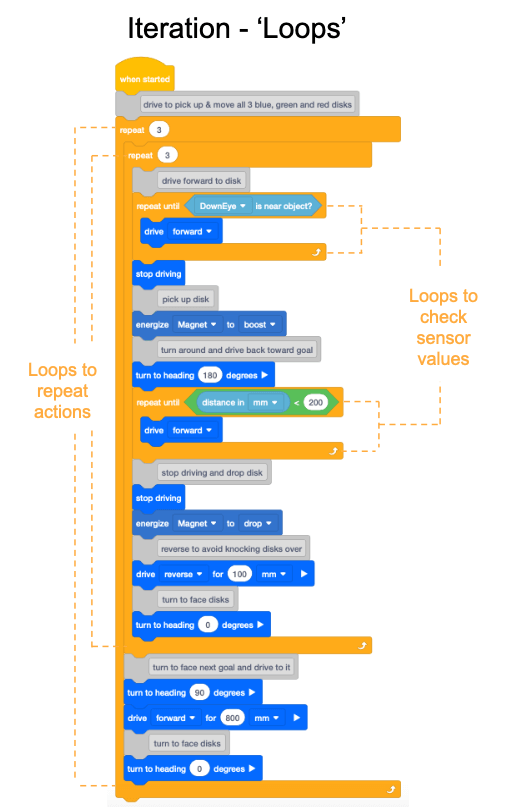
- การทำซ้ำ - อัลกอริทึมมักใช้การทำซ้ำเพื่อดำเนินการตามขั้นตอนตามจำนวนครั้งที่กำหนดหรือจนกว่าจะตรงตามเงื่อนไขบางอย่าง หรือที่เรียกว่า "การวนซ้ำ" การทำซ้ำสามารถเปลี่ยนการไหลของโครงการโดยการทำซ้ำลักษณะการทำงานตามจำนวนครั้งที่ระบุหรือจนกว่าจะตรงตามเงื่อนไข
โครงการตัวอย่างนี้จากความท้าทายหน่วยที่ 8 เป็นตัวอย่างของอัลกอริทึม ซึ่งรวมถึงการรวมกันของลูปข้อมูลเซ็นเซอร์และคำสั่งที่รวมเข้าด้วยกันในลำดับเพื่อแก้ปัญหา Disk Mover Challenge
โครงการใช้การทำซ้ำหรือ "ลูป" เพื่อทำซ้ำการดำเนินการและตรวจสอบค่าเซ็นเซอร์ที่รายงาน
วิธีที่คำสั่งถูกจัดลำดับและรวมกันจะกำหนดพฤติกรรมของหุ่นยนต์ VR โครงการ นี้ยังรวมถึงการเลือกซึ่งกำหนดส่วนต่างๆของโครงการที่ดำเนินการตามสภาพเซ็นเซอร์