수업 1: 알고리즘이란 무엇인가?
이 수업에서는 알고리즘이 무엇인지 알아보고 VEXcode VR에서 알고리즘을 사용하여 더 다양한 동작을 하는 VEXcode VR 프로젝트를 만드는 방법을 알아봅니다. 알고리즘 프로젝트는 VR 로봇이 환경에 반응하도록 지시하는데, 이는 Dynamic Castle Crasher Challenge를 해결하는 데 필요합니다.
학습 성과
- 알고리즘은 순서, 선택, 루프로 구성되어 있다는 것을 알아봅니다.
- 알고리즘은 VR 로봇이 수행하는 프로세스를 위해 프로그래밍 언어를 사용하여 구현된 정확한 명령 시퀀스라는 것을 식별합니다.
알고리즘
알고리즘은 VEXcode VR과 같은 프로그래밍 언어를 사용하여 구현된 정확한 명령 시퀀스로, VR 로봇이 수행하는 프로세스를 위한 것입니다.
알고리즘의 기본 요소는 순서, 선택, 반복입니다.
- 시퀀스 - 원하는 결과를 얻기 위해 프로젝트에서 동작과 명령을 결합하는 순서입니다.
- 선택 - 프로젝트에서 조건문을 사용하는 것입니다. [If then] 또는 [If then else]와 같은 조건문은 VEXcode VR 프로젝트의 프로젝트 흐름에 영향을 미칩니다.
- 반복 - 알고리즘은 종종 반복을 사용하여 특정 횟수만큼 단계를 실행하거나 특정 조건이 충족될 때까지 실행합니다. 이것을 "루핑"이라고도 합니다. 반복은 특정 횟수만큼 동작을 반복하거나 조건이 충족될 때까지 동작을 반복함으로써 프로젝트 흐름을 변경할 수 있습니다.
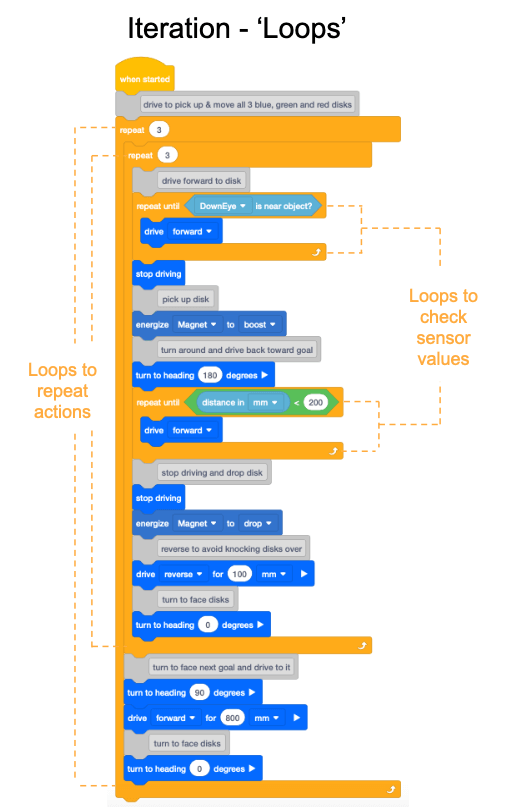
8단원 챌린지의 이 예제 프로젝트는 알고리즘의 한 예입니다. 디스크 무버 챌린지를 해결하기 위해 루프, 센서 데이터, 명령을 조합하여 순서대로 배치한 것입니다.
이 프로젝트에서는 반복이나 "루프"를 사용하여 작업을 반복하고 보고된 센서 값을 확인합니다.
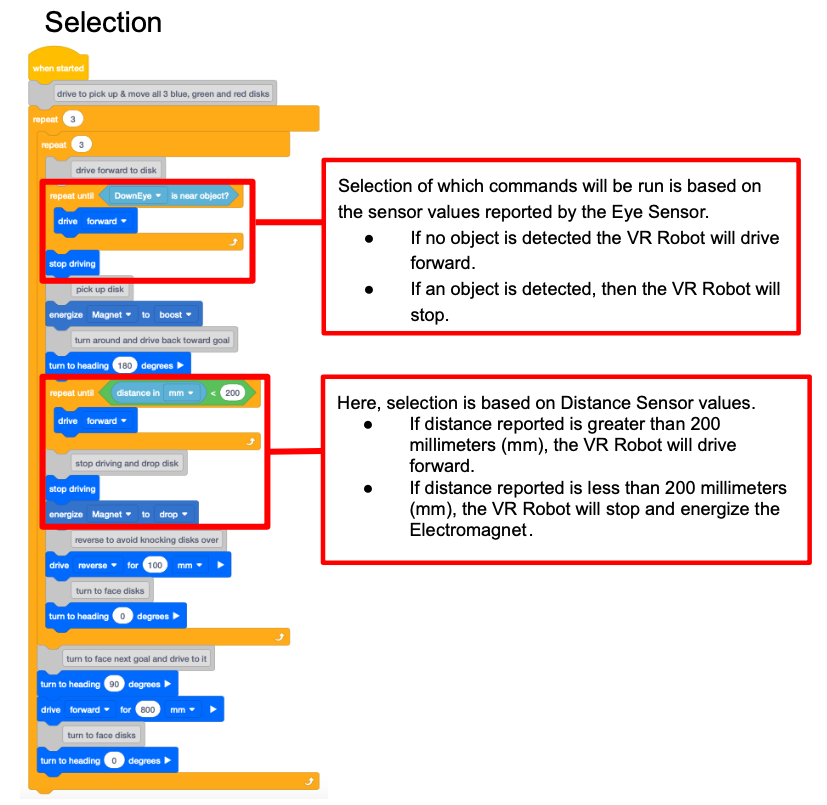
명령이 순서화되고 결합되는 방식에 따라 VR 로봇의 동작이 결정됩니다. 이 프로젝트에는 센서 상태에 따라 실행되는 프로젝트 부분을 결정하는 선택도 포함됩니다.