
الدرس 2: التحدي المصغر
تحدي صغير
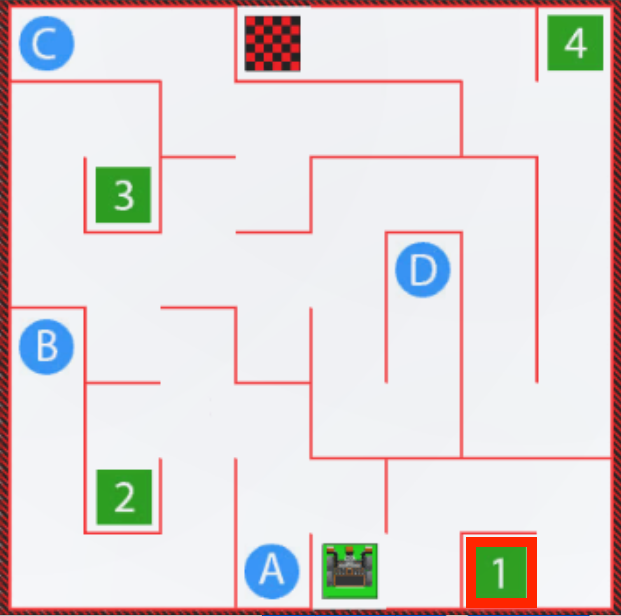
لهذا التحدي الصغير، قم بإنشاء مشروع حيث يقود روبوت الواقع الافتراضي من البداية إلى الرقم "1" على ملعب المتاهة الجدارية باستخدام مستشعر المسافة. سيستخدم هذا المشروع العديد من الأوامر while loops with greater than (>) and get_distance.
لمعلوماتك
يمكن أيضًا مراقبة القيم التي تم الإبلاغ عنها بواسطة مستشعر المسافة في وحدة التحكم في الشاشة. تتيح مراقبة قيم المستشعر في وحدة تحكم الشاشة للمستخدم عرض تقارير في الوقت الفعلي لقيمة محددة (أو قيم متعددة) في المشروع. قم بالوصول إلى نافذة الشاشة عن طريق تحديد أيقونة الشاشة بجوار التعليمات.

في هذا المشروع، يمكن استخدام وحدة التحكم في الشاشة لعرض القيم التي تم الإبلاغ عنها بواسطة الأمر get_distance للمساعدة في تحديد موعد احتياج روبوت الواقع الافتراضي إلى الدوران للقيادة بنجاح عبر ساحة اللعب المتاهة المكونة من جدران. في مقطع الفيديو أدناه، بينما يتحرك روبوت الواقع الافتراضي على الملعب، تعرض وحدة التحكم في الشاشة المفتوحة بيانات المسافة الأمامية بالملليمترات والمسافة الأمامية بالبوصة في الوقت الفعلي.
لعرض قيم المستشعر في وحدة التحكم في الشاشة، في السطر الأول من المشروع، اسحب أو اكتب الأمر monitor_sensor كما هو موضح أدناه. اكتب معرف كسلسلة في معلمة الأمر. بالنسبة لهذا المشروع، تكون القيم المعروضة في وحدة التحكم في الشاشة من مستشعر المسافة الأمامية، وستكون معلمة السلسلة "front_distance.get_distance".
def main ():
monitor_sensor(" front_distance.get_distance ")لمزيد من المعلومات حول كيفية استخدام وحدة التحكم في الشاشة، راجع هذه المقالة.
اتبع هذه الخطوات لإكمال التحدي المصغر:
- شاهد فيديو الحل لمعرفة كيف يجب أن يقود روبوت الواقع الافتراضي من أجل إكمال التحدي المصغر. في مقطع الفيديو أدناه، يبدأ روبوت الواقع الافتراضي في موقع البداية وينعطف أولاً يمينًا لمواجهة الجدار القصير الذي يفصل الروبوت عن الرقم 1. ثم يتقدم الروبوت إلى الأمام، ويستدير إلى اليسار، ويتقدم إلى الأمام ويستدير إلى اليمين مرتين لتجاوز الجدار الأول. بعد ذلك، يستدير الروبوت يمينًا ويدفع للأمام مرتين للالتفاف حول الجدار الأفقي إلى الرقم 1.
- إنشاء مشروع عن طريق إضافة أو إزالة الأوامر اللازمة إلى مشروع Unit5Lesson2.
- ابدأ المشروع لاختباره.
- إذا لم ينجح المشروع، فقم بالتعديل وحاول مرة أخرى. استمر في مراجعة المشروع وتشغيله حتى ينجح روبوت الواقع الافتراضي في القيادة من البداية إلى الرقم "1".
- احفظ المشروع بمجرد أن ينجح روبوت الواقع الافتراضي في القيادة من البداية إلى الرقم "1".
تهانينا! لقد حللت التحدي الصغير!