
Leçon 2 : Mini Défi
Mini Défi
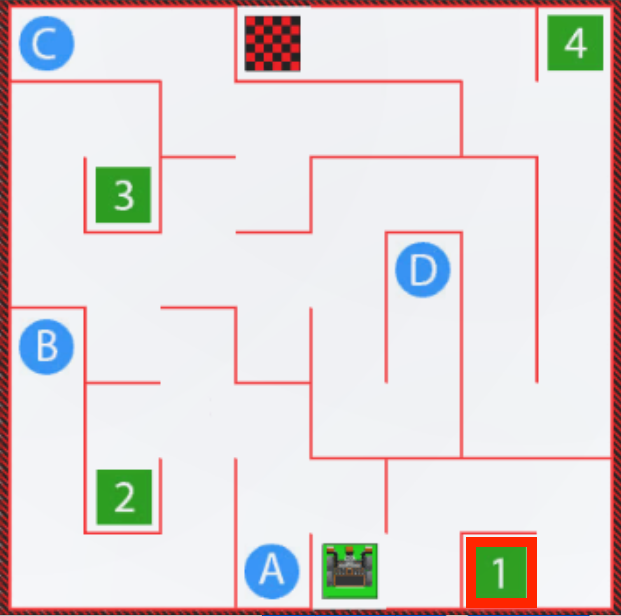
Pour ce mini défi, créez un projet où le robot VR conduit du début au chiffre « 1 » sur le terrain de jeu du labyrinthe mural à l' aide du capteur de distance. Ce projet utilisera plusieurs boucles while avec des opérateurs supérieurs à (>) et get_distance commandes.
Pour votre information
Les valeurs rapportées par le capteur de distance peuvent également être surveillées dans la console de surveillance. La surveillance des valeurs des capteurs dans la console de surveillance permet à l'utilisateur d'afficher des rapports en temps réel d'une valeur spécifique (ou de plusieurs valeurs) dans un projet. Accédez à la fenêtre Surveillance en sélectionnant l'icône Surveillance à côté de l'aide.

Dans ce projet, la console Monitor peut être utilisée pour afficher les valeurs signalées par la commande get_distance pour aider à déterminer quand le robot VR doit tourner pour traverser avec succès le Wall Maze Playground. Dans le clip vidéo ci-dessous, lorsque le robot VR se déplace sur le terrain de jeu, la console de moniteur ouverte affiche les données de distance avant en millimètres et de distance avant en pouces mises à jour en temps réel.
Pour afficher les valeurs du capteur dans la console Monitor, dans la première ligne du projet, faites glisser ou tapez la commande monitor_sensor comme indiqué ci-dessous. Tapez l'identifiant du capteur sous forme de chaîne dans le paramètre de la commande. Pour ce projet, les valeurs affichées dans la console de surveillance proviennent du capteur de distance avant, et le paramètre de chaîne sera "front_distance.get_distance".
def main() :
monitor_sensor("front_distance.get_distance")Pour plus d'informations sur l'utilisation de la console de moniteur, consultez cet article.
Suivez ces étapes pour terminer le mini défi :
- Regardez la vidéo de la solution pour voir comment le robot VR doit conduire afin de relever le mini défi. Dans le clip vidéo ci-dessous, le robot VR commence à l'emplacement de départ et tourne d'abord à droite pour faire face au mur court séparant le robot du numéro 1. Le robot avance ensuite, tourne à gauche, avance et tourne à droite deux fois pour franchir le premier mur. Ensuite, le robot tourne à droite et avance deux fois pour contourner le mur horizontal jusqu'au numéro 1.
- Créez un projet en ajoutant ou en supprimant les commandes nécessaires au projet Unit5Lesson2.
- Lancez le projet pour le tester.
- Si le projet échoue, modifiez-le et réessayez. Continuez à réviser et à exécuter le projet jusqu'à ce que le robot VR conduise avec succès du début au numéro « 1 ».
- Enregistrez le projet une fois que le robot VR a conduit avec succès du début au numéro « 1 ».
Félicitations ! Vous avez résolu le mini défi !
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf