
Lição 2: Mini Desafio
Mini Desafio
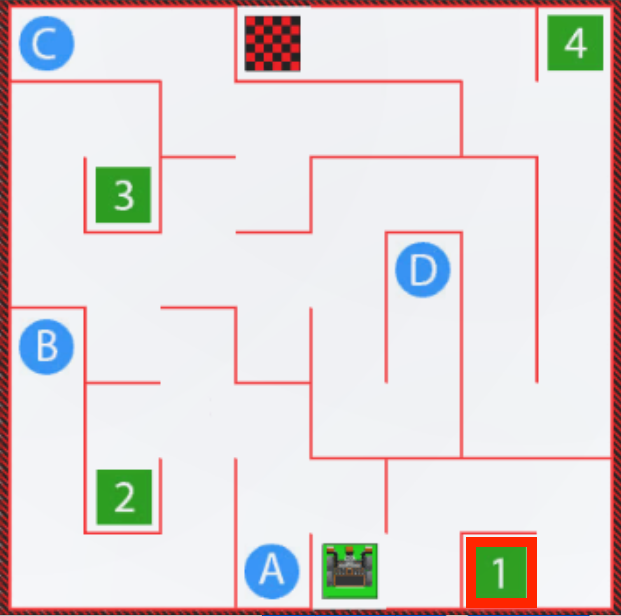
Para este mini desafio, crie um projeto em que o Robô de RV dirija do início ao número ‘1’ no Wall Maze Playground usando o sensor de distância. Este projeto irá utilizar vários while ciclos com operadores maiores que (>) e get_distance comandos.
Para sua informação
Os valores reportados pelo Sensor de Distância também podem ser monitorados no Console do Monitor. A monitorização dos valores do sensor na Consola do Monitor permite ao utilizador visualizar relatórios em tempo real de um valor específico (ou vários valores) num projeto. Aceda à Janela do Monitor selecionando o ícone Monitor ao lado da Ajuda.

Neste projeto, a consola do monitor pode ser utilizada para visualizar os valores reportados pelo comando get_distance para ajudar a determinar quando o robô de RV precisa de virar para passar com sucesso pelo Wall Maze Playground. No videoclipe abaixo, à medida que o Robô VR se move no Playground, o Console do Monitor aberto mostra os dados de Distância Frontal em milímetros e Distância Frontal em polegadas atualizados em tempo real.
Para visualizar os valores dos sensores na Monitor Console, na primeira linha do projeto, arraste ou introduza o comando monitor_sensor conforme indicado abaixo. Introduza o identificador do sensor como uma string no parâmetro do comando. Para este projeto, os valores exibidos no Console do Monitor são do Sensor de Distância Frontal e o parâmetro string será "front_distance.get_distance".
def main():
monitor_sensor("front_distance.get_distance")Para obter mais informações sobre como usar o Console do Monitor, consulte este artigo.
Siga estas etapas para concluir o mini desafio:
- Assista ao vídeo da solução para ver como o robô VR deve dirigir para completar o mini desafio. No videoclipe abaixo, o Robô VR começa no local de partida e primeiro vira à direita para ficar de frente para a parede curta que separa o robô do número 1. O robô então avança, vira à esquerda, avança e vira à direita duas vezes para passar pela primeira parede. Em seguida, o robô vira à direita e avança duas vezes para contornar a parede horizontal até o número 1.
- Crie um projeto adicionando ou removendo os comandos necessários ao projeto Unit5Lesson2.
- Inicie o projeto para testá-lo.
- Se o projeto não for bem-sucedido, edite e tente novamente. Continue a revisar e executar o projeto até que o robô de RV conduza com sucesso do início ao número ‘1’.
- Salve o projeto assim que o robô de RV conduzir com sucesso do início ao número ‘1’.
Parabéns! Você resolveu o mini desafio!
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf