
पाठ 2: लघु चुनौती
मिनी चैलेंज
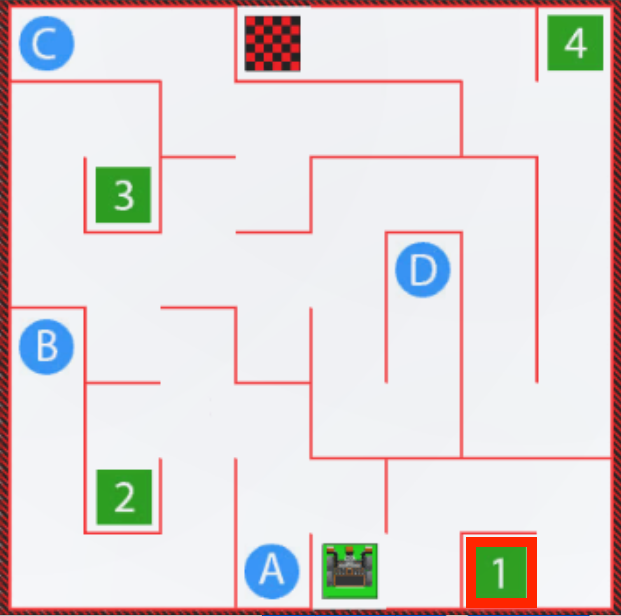
इस मिनी चुनौती के लिए, एक प्रोजेक्ट बनाएं जिसमें वीआर रोबोट दूरी सेंसर का उपयोग करके वॉल भूलभुलैया खेल के मैदान पर शुरुआत से नंबर '1' तक ड्राइव करता है। यह प्रोजेक्ट (>) से अधिक ऑपरेटरों और get_distance कमांड के साथ कई while लूप का उपयोग करेगा।
आपकी जानकारी के लिए
दूरी सेंसर द्वारा रिपोर्ट किए गए मानों की मॉनिटरिंग मॉनिटर कंसोल में भी की जा सकती है। मॉनिटर कंसोल में सेंसर मानों की निगरानी करने से उपयोगकर्ता को किसी प्रोजेक्ट में किसी विशिष्ट मान (या एकाधिक मानों) की वास्तविक समय रिपोर्ट देखने की सुविधा मिलती है। सहायता के बगल में स्थित मॉनिटर आइकन का चयन करके मॉनिटर विंडो तक पहुंचें।

इस परियोजना में, मॉनिटर कंसोल का उपयोग get_distanceकमांड द्वारा रिपोर्ट किए जा रहे मानों को देखने के लिए किया जा सकता है ताकि यह निर्धारित करने में मदद मिल सके कि वॉल मेज़ प्लेग्राउंडके माध्यम से सफलतापूर्वक ड्राइव करने के लिए वीआर रोबोट को कब मुड़ना होगा। नीचे दिए गए वीडियो क्लिप में, जैसे ही वीआर रोबोट खेल के मैदान पर चलता है, खुला मॉनिटर कंसोल वास्तविक समय में मिलीमीटर में फ्रंट डिस्टेंस और इंच में फ्रंट डिस्टेंस का डेटा अपडेट करता है।
मॉनिटर कंसोल में सेंसर मान प्रदर्शित करने के लिए, प्रोजेक्ट की पहली पंक्ति में, नीचे दिखाए अनुसार monitor_sensorकमांड खींचें या टाइप करें। कमांड के पैरामीटर में सेंसर के पहचानकर्ता को स्ट्रिंग के रूप में टाइप करें। इस परियोजना के लिए, मॉनिटर कंसोल में प्रदर्शित मान फ्रंट डिस्टेंस सेंसर से हैं, और स्ट्रिंग पैरामीटर "front_distance.get_distance" होगा।
def main():
monitor_sensor("front_distance.get_distance")मॉनिटर कंसोल का उपयोग कैसे करें, बारे में अधिक जानकारी के लिए, यह आलेख देखें
मिनी चुनौती को पूरा करने के लिए इन चरणों का पालन करें:
- मिनी चुनौती को पूरा करने के लिए वीआर रोबोट को किस प्रकार ड्राइव करना चाहिए, यह देखने के लिए समाधान वीडियो देखें। नीचे दिए गए वीडियो क्लिप में, वीआर रोबोट प्रारंभिक स्थान से शुरू होता है और सबसे पहले दाईं ओर मुड़कर उस छोटी दीवार का सामना करता है जो रोबोट को नंबर 1 से अलग करती है। इसके बाद रोबोट आगे बढ़ता है, बायीं ओर मुड़ता है, आगे बढ़ता है और पहली दीवार को पार करने के लिए दो बार दायीं ओर मुड़ता है। इसके बाद, रोबोट दाईं ओर मुड़ता है और क्षैतिज दीवार के चारों ओर घूमकर नंबर 1 तक पहुंचने के लिए दो बार आगे बढ़ता है।
- Unit5Lesson2 प्रोजेक्ट में आवश्यक कमांड जोड़कर या हटाकर प्रोजेक्ट बनाएं।
- इसका परीक्षण करने के लिए परियोजना शुरू करें।
- यदि परियोजना सफल न हो तो उसे संपादित करें और पुनः प्रयास करें। जब तक VR रोबोट सफलतापूर्वक प्रारंभ से संख्या '1' तक नहीं पहुंच जाता, तब तक परियोजना को संशोधित करना और चलाना जारी रखें।
- जब VR रोबोट सफलतापूर्वक प्रारंभ से संख्या '1' तक पहुंच जाए तो प्रोजेक्ट को सेव कर दें।
बधाई हो! आपने मिनी चुनौती हल कर ली!