
പാഠം 2: മിനി ചലഞ്ച്
മിനി ചലഞ്ച്
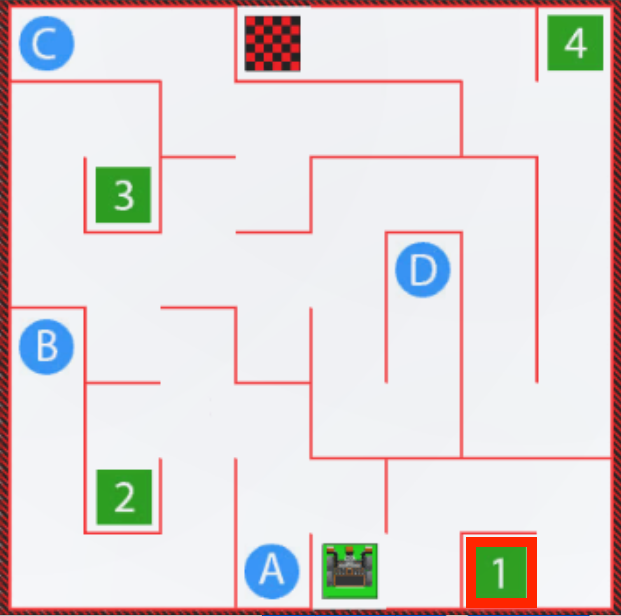
ഈ മിനി ചലഞ്ചിനായി, ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിച്ച് വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട് ൽ തുടക്കം മുതൽ '1' എന്ന നമ്പറിലേക്ക് VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്ന ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുക. ഈ പ്രോജക്റ്റ് ഒന്നിലധികം ഉം ലൂപ്പുകളും (>) ൽ കൂടുതലുള്ള ഓപ്പറേറ്റർമാരും get_distance കമാൻഡുകളും ഉപയോഗിക്കും.
നിങ്ങളുടെ അറിവിലേക്കായി
ഡിസ്റ്റൻസ് സെൻസർ റിപ്പോർട്ട് ചെയ്യുന്ന മൂല്യങ്ങൾ മോണിറ്റർ കൺസോളിലും നിരീക്ഷിക്കാൻ കഴിയും. മോണിറ്റർ കൺസോളിലെ സെൻസർ മൂല്യങ്ങൾ നിരീക്ഷിക്കുന്നത്, ഒരു പ്രോജക്റ്റിലെ ഒരു നിർദ്ദിഷ്ട മൂല്യത്തിന്റെ (അല്ലെങ്കിൽ ഒന്നിലധികം മൂല്യങ്ങളുടെ) തത്സമയ റിപ്പോർട്ടുകൾ കാണാൻ ഉപയോക്താവിനെ അനുവദിക്കുന്നു. സഹായത്തിന് അടുത്തുള്ള മോണിറ്റർ ഐക്കൺ തിരഞ്ഞെടുത്ത് മോണിറ്റർ വിൻഡോയിലേക്ക് പ്രവേശിക്കുക.

ഈ പ്രോജക്റ്റിൽ, വാൾ മേസ് പ്ലേഗ്രൗണ്ട്വിജയകരമായി ഓടിക്കാൻ VR റോബോട്ട് എപ്പോൾ തിരിയണമെന്ന് നിർണ്ണയിക്കാൻ സഹായിക്കുന്നതിന് get_distanceകമാൻഡ് റിപ്പോർട്ട് ചെയ്യുന്ന മൂല്യങ്ങൾ കാണാൻ മോണിറ്റർ കൺസോൾ ഉപയോഗിക്കാം. താഴെയുള്ള വീഡിയോ ക്ലിപ്പിൽ, VR റോബോട്ട് പ്ലേഗ്രൗണ്ടിൽ നീങ്ങുമ്പോൾ, തുറന്ന മോണിറ്റർ കൺസോൾ ഫ്രണ്ട് ഡിസ്റ്റൻസിനായുള്ള ഡാറ്റ മില്ലിമീറ്ററിലും ഫ്രണ്ട് ഡിസ്റ്റൻസിനായുള്ള ഡാറ്റ ഇഞ്ചിലും തത്സമയം അപ്ഡേറ്റ് ചെയ്യുന്നു.
മോണിറ്റർ കൺസോളിൽ സെൻസർ മൂല്യങ്ങൾ പ്രദർശിപ്പിക്കുന്നതിന്, പ്രോജക്റ്റിന്റെ ആദ്യ വരിയിൽ, താഴെ കാണിച്ചിരിക്കുന്നതുപോലെ monitor_sensorകമാൻഡ് ഡ്രാഗ് ഇൻ ചെയ്യുക അല്ലെങ്കിൽ ടൈപ്പ് ചെയ്യുക. കമാൻഡിന്റെ പാരാമീറ്ററിൽ സെൻസറിന്റെ ഐഡന്റിഫയർ ഒരു സ്ട്രിംഗായി ടൈപ്പ് ചെയ്യുക. ഈ പ്രോജക്റ്റിനായി, മോണിറ്റർ കൺസോളിൽ പ്രദർശിപ്പിച്ചിരിക്കുന്ന മൂല്യങ്ങൾ ഫ്രണ്ട് ഡിസ്റ്റൻസ് സെൻസറിൽ നിന്നുള്ളതാണ്, കൂടാതെ സ്ട്രിംഗ് പാരാമീറ്റർ "front_distance.get_distance" ആയിരിക്കും.
ഡെഫ് മെയിൻ():
മോണിറ്റർ_സെൻസർ("ഫ്രണ്ട്_ഡിസ്റ്റൻസ്.ഗെറ്റ്_ഡിസ്റ്റൻസ്")മോണിറ്റർ കൺസോൾ എങ്ങനെ ഉപയോഗിക്കാം എന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, ഈ ലേഖനംകാണുക.
മിനി ചലഞ്ച് പൂർത്തിയാക്കാൻ ഈ ഘട്ടങ്ങൾ പാലിക്കുക:
- മിനി ചലഞ്ച് പൂർത്തിയാക്കാൻ വിആർ റോബോട്ട് എങ്ങനെ ഡ്രൈവ് ചെയ്യണമെന്ന് കാണാൻ പരിഹാര വീഡിയോ കാണുക. താഴെയുള്ള വീഡിയോ ക്ലിപ്പിൽ, VR റോബോട്ട് ആരംഭ സ്ഥാനത്ത് നിന്ന് ആരംഭിച്ച് ആദ്യം റോബോട്ടിനെ നമ്പർ 1 ൽ നിന്ന് വേർതിരിക്കുന്ന ചെറിയ മതിലിന് അഭിമുഖമായി വലത്തേക്ക് തിരിയുന്നു. തുടർന്ന് റോബോട്ട് മുന്നോട്ട് ഓടുന്നു, ഇടത്തേക്ക് തിരിയുന്നു, മുന്നോട്ട് ഓടുന്നു, വലത്തേക്ക് രണ്ടുതവണ തിരിയുന്നു, അങ്ങനെ ആദ്യത്തെ മതിൽ കടക്കുന്നു. അടുത്തതായി, റോബോട്ട് വലത്തേക്ക് തിരിഞ്ഞ് രണ്ടുതവണ മുന്നോട്ട് നീങ്ങി തിരശ്ചീനമായ ഭിത്തിയിലൂടെ നമ്പർ 1 ലേക്ക് എത്തുന്നു.
- Unit5Lesson2 പ്രോജക്റ്റിലേക്ക് ആവശ്യമായ കമാൻഡുകൾ ചേർത്തോ നീക്കം ചെയ്തോ ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുക.
- അത് പരീക്ഷിക്കുന്നതിനായി പ്രോജക്റ്റ് ആരംഭിക്കുക.
- പ്രോജക്റ്റ് വിജയിച്ചില്ലെങ്കിൽ, എഡിറ്റ് ചെയ്ത് വീണ്ടും ശ്രമിക്കുക. വി.ആർ. റോബോട്ട് തുടക്കം മുതൽ '1' എന്ന നമ്പറിലേക്ക് വിജയകരമായി നീങ്ങുന്നതുവരെ പദ്ധതി പരിഷ്കരിച്ച് പ്രവർത്തിപ്പിക്കുന്നത് തുടരുക.
- വി.ആർ. റോബോട്ട് തുടക്കം മുതൽ '1' എന്ന നമ്പറിലേക്ക് വിജയകരമായി ഡ്രൈവ് ചെയ്തുകഴിഞ്ഞാൽ പ്രോജക്റ്റ് സേവ് ചെയ്യുക.
അഭിനന്ദനങ്ങൾ! നിങ്ങൾ മിനി ചലഞ്ച് പരിഹരിച്ചു!
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.