
บทที่ 2: มินิชาเลนจ์
มินิชาเลนจ์
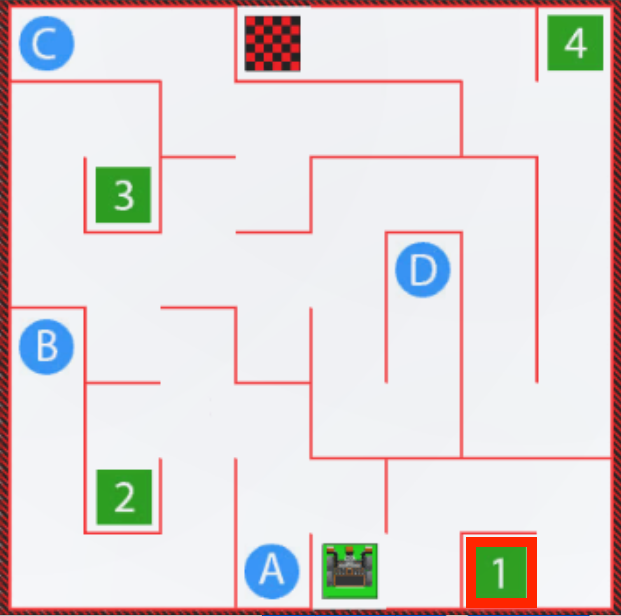
สำหรับการท้าทายขนาดเล็กนี้ให้สร้างโครงการที่หุ่นยนต์ VR ขับจากจุดเริ่มต้นไปยังหมายเลข ‘1’ บน Wall Maze Playground โดยใช้เซ็นเซอร์ระยะทาง โปรเจ็กต์นี้จะใช้คำสั่ง while หลายตัว กับตัวดำเนินการที่มากกว่า (>) และ get_distance
สำหรับข้อมูลของคุณ
นอกจากนี้ยังสามารถตรวจสอบค่าที่รายงานโดยเซ็นเซอร์ระยะทางได้ในคอนโซลมอนิเตอร์ การตรวจสอบค่าเซ็นเซอร์ในคอนโซลมอนิเตอร์ช่วยให้ผู้ใช้สามารถดูรายงานแบบเรียลไทม์ของค่าเฉพาะ (หรือหลายค่า) ในโครงการ เข้าถึงหน้าต่างการตรวจสอบโดยเลือกไอคอนการตรวจสอบที่อยู่ถัดจากความช่วยเหลือ

ในโปรเจ็กต์นี้ สามารถใช้ Monitor Console เพื่อดูค่าที่รายงานโดยคำสั่ง get_distance เพื่อช่วยกำหนดว่าเมื่อใด VR Robot จะต้องเลี้ยวเพื่อขับผ่านสนามเด็กเล่น Wall Mazeได้สำเร็จ ในคลิปวิดีโอด้านล่างเมื่อหุ่นยนต์ VR เคลื่อนที่บนสนามเด็กเล่นคอนโซลหน้าจอแบบเปิดจะแสดงข้อมูลสำหรับระยะด้านหน้าเป็นมิลลิเมตรและระยะด้านหน้าเป็นนิ้วอัปเดตแบบเรียลไทม์
หากต้องการแสดงค่าเซนเซอร์ใน Monitor Console ในบรรทัดแรกของโปรเจ็กต์ ให้ลากหรือพิมพ์คำสั่ง monitor_sensor ดังแสดงด้านล่าง พิมพ์ตัวระบุ เป็นสตริงในพารามิเตอร์ของคำสั่ง สำหรับโครงการนี้ค่าที่แสดงในคอนโซลมอนิเตอร์มาจากเซ็นเซอร์ระยะทางด้านหน้าและพารามิเตอร์สตริงจะเป็น "front_distance.get_distance"
def main ():
monitor_sensor (" front_distance.get_distance ")สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการใช้คอนโซลมอนิเตอร์โปรดดูบทความ นี้
ทำตามขั้นตอนต่อไปนี้เพื่อทำมินิชาเลนจ์:
- ดูวิดีโอโซลูชันเพื่อดูว่าหุ่นยนต์ VR ควรขับรถอย่างไรเพื่อทำมินิชาเลนจ์ ในคลิปวิดีโอด้านล่างหุ่นยนต์ VR จะเริ่มต้นในตำแหน่งเริ่มต้นและเลี้ยวขวาครั้งแรกเพื่อหันหน้าไปทางผนังสั้นเพื่อแยกหุ่นยนต์ออกจากหมายเลข 1 จากนั้นหุ่นยนต์จะขับไปข้างหน้าเลี้ยวซ้ายขับไปข้างหน้าและเลี้ยวขวาสองครั้งเพื่อผ่านกำแพงแรก จากนั้นหุ่นยนต์จะเลี้ยวขวาและขับไปข้างหน้าสองครั้งเพื่ออ้อมกำแพงแนวนอนไปยังหมายเลข 1
- สร้างโครงการโดยเพิ่มหรือลบคำสั่งที่จำเป็น ใน โครงการ Unit5Lesson2
- เริ่มโครงการเพื่อทดสอบ
- หากโปรเจกต์ไม่สำเร็จให้แก้ไขแล้วลองอีกครั้ง ดำเนินการแก้ไขและเรียกใช้โครงการต่อไปจนกว่า VR Robot จะประสบความสำเร็จในการขับเคลื่อนจากจุดเริ่มต้นไปยังหมายเลข ‘1’
- บันทึกโครงการเมื่อ VR Robot ประสบความสำเร็จในการขับเคลื่อนจากจุดเริ่มต้นไปยังหมายเลข ‘1’
ขอแสดงความยินดี! คุณเอาชนะมินิชาเลนจ์!