التقط قرصًا ملونًا وضعه باستخدام محركات على الذراع الروبوتية.
كيف يمكن لمحرك أن يجعل ذراع الروبوت أكثر فائدة ؟
يبني: ذراع روبوتية آلية
يتطلب مجموعتين من VEX GO
معمل 3
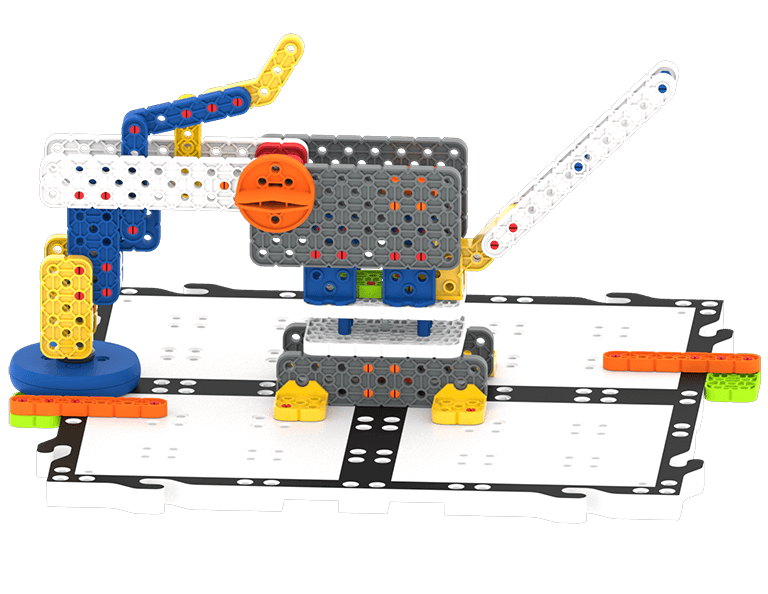
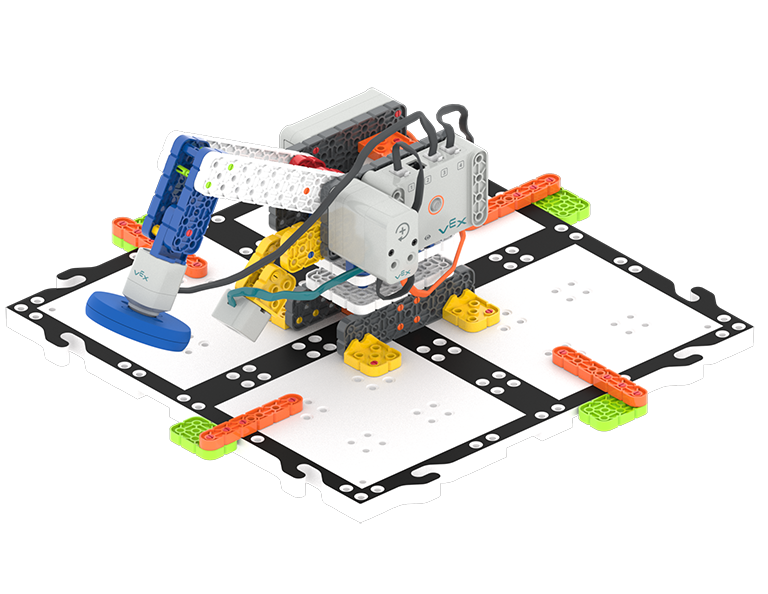
استخدام الكهرومغناطيس
الوقت الكلي: 40 دقائق
قم بتشفير ذراع الروبوت لتحريك الأقراص باستخدام المغناطيس الكهربائي.
كيف يمكنني التحكم في ذراع روبوت باستخدام الكود ؟
يبني: ذراع الروبوت (محور واحد)
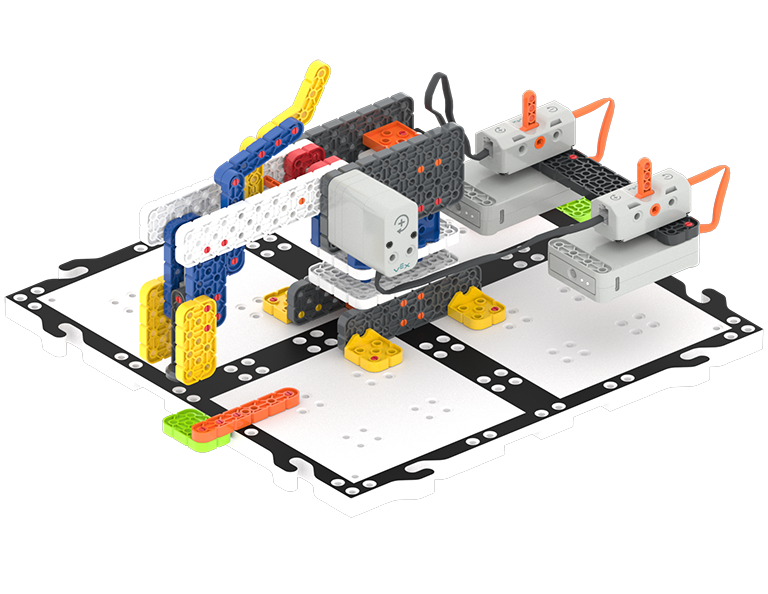
معمل 4
استخدام مستشعر العين
الوقت الكلي: 40 دقائق
قم بتشفير ذراع الروبوت لالتقاط الأقراص عند اكتشافها بواسطة مستشعر العين!
كيف يساعد مستشعر العين ذراع الروبوت ؟
يبني: ذراع الروبوت (محورين)
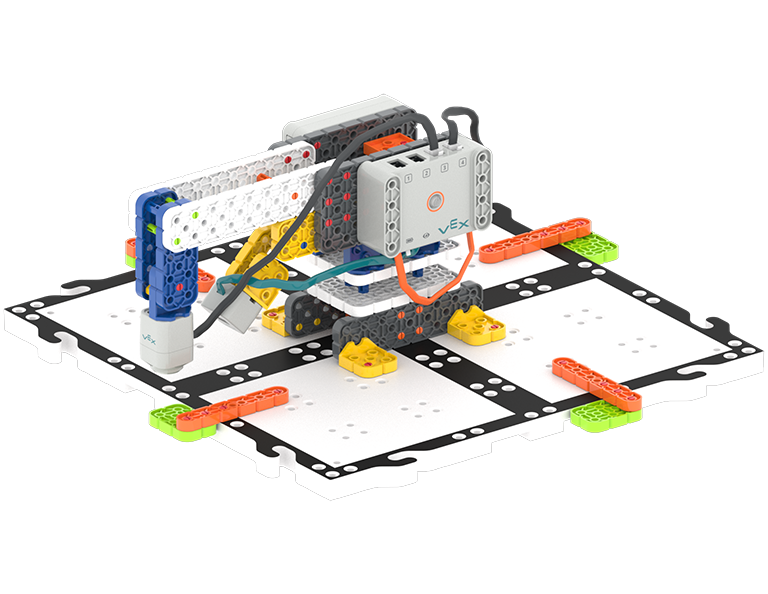
معمل 5
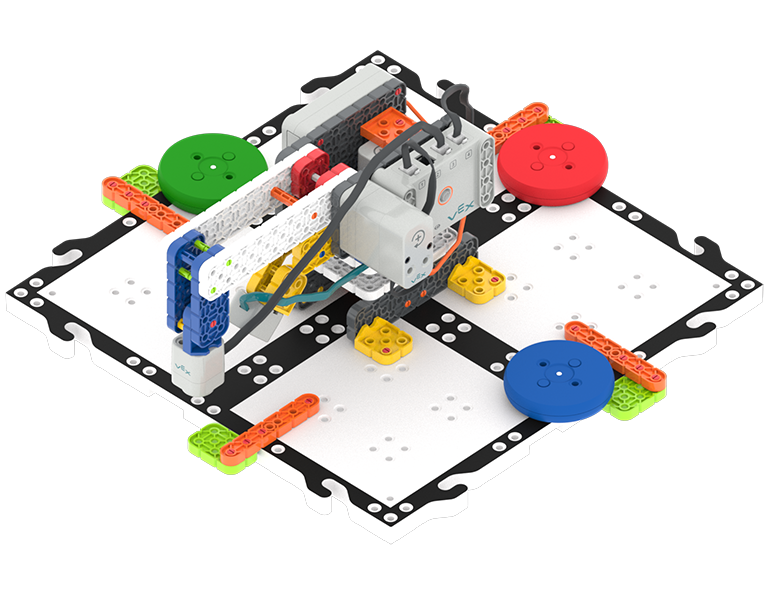
اتخاذ القرار
الوقت الكلي: 40 دقائق
قم بتشفير ذراع الروبوت للكشف عن الأقراص الملونة المختلفة وفرزها!
كيف يمكن للذراع الروبوتية اتخاذ قرار ؟
يبني: ذراع الروبوت (محورين)
ترجمة محتوى مختبرات العلوم والتكنولوجيا والهندسة والرياضيات المستندة إلى Google
You are about to navigate to Google Docs. The linked document is in English. For instructions on translating the document to another language, please refer to
Google Docs’ translation guide
.
Note: To use the translation feature, first make a copy of the document.
This option will prevent this dialog from appearing again in the future.