
الدرس 3: استخدام ملاحظات المستشعر المبلغ عنها لالتقاط الأقراص
سيستخدم هذا الدرس ملاحظات المستشعر المبلغ عنها لحل نفس التحدي الذي يواجه الدرس 2. سيقوم روبوت الواقع الافتراضي بالتقاط ونقل أول قرص أزرق إلى الهدف الأزرق.
-
ابدأ مشروعًا جديدًا في VEXcode VR واسم المشروع Unit8Lesson3.

-
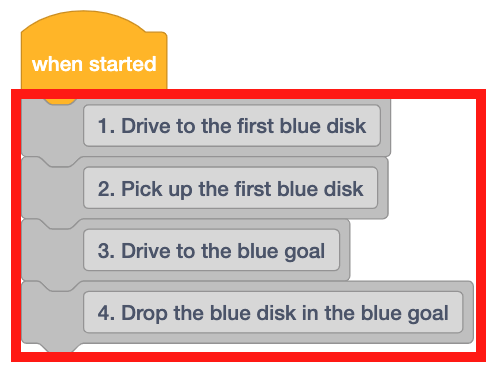
اسحب أربع كتل تعليقات إلى مساحة العمل. أضف تعليقات لكل خطوة من الخطوات اللازمة لروبوت الواقع الافتراضي للقيادة إلى القرص الأول، والتقاطه، وإعادته إلى الهدف الأزرق.
-
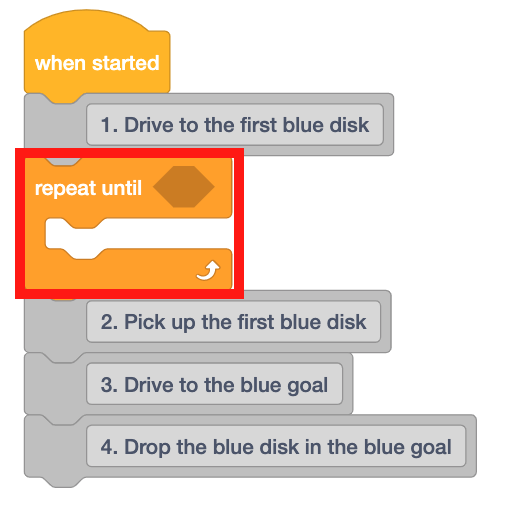
اسحب كتلة [Repeat until] إلى مساحة العمل أسفل التعليق الأول.
لمعلوماتك
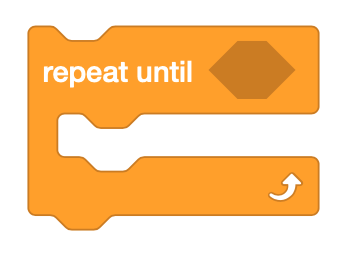
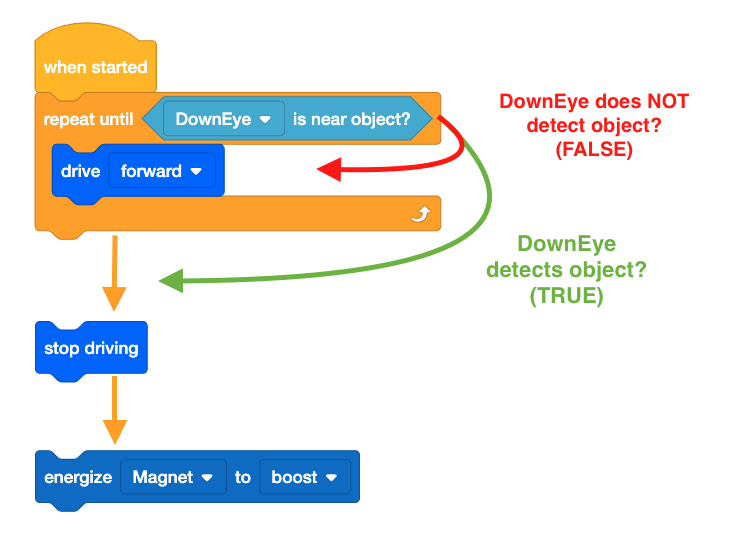
كتلة [Repeat until] هي كتلة C تقبل كتل المراسل المنطقية. ستتحقق كتلة [Repeat till] فقط من الحالة المنطقية في بداية كل حلقة. إذا تم الإبلاغ عن الحالة المنطقية على أنها خاطئة، فسيتم تشغيل الكتل الداخلية. إذا تم الإبلاغ عن الحالة المنطقية على أنها صحيحة، فسيتم تخطي الكتل الداخلية.
-
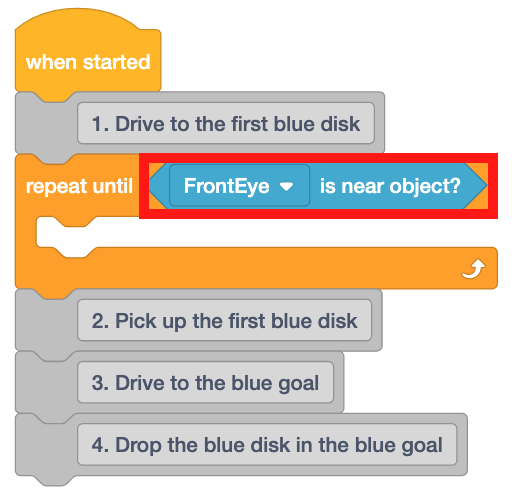
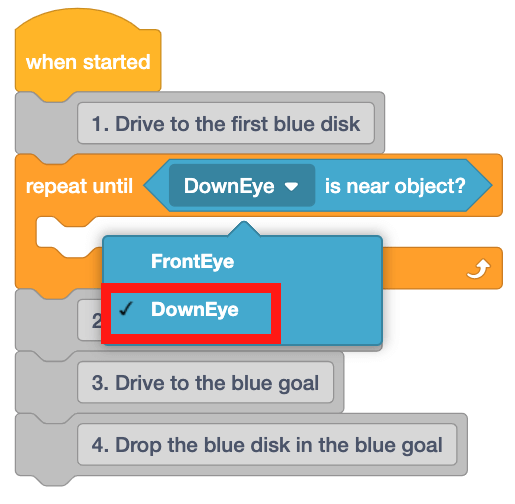
يتم الإبلاغ عن <Eye Sensor near object> الكتلة عندما يكتشف روبوت VR قرصًا ملونًا في Disk Mover Playground. اسحب هذه الكتلة إلى المشروع.
-
الأقراص الموجودة في ملعب محرك الأقراص موجودة على أرضية الملعب ولا يمكن اكتشافها بواسطة مستشعر العين الأمامي. لهذا السبب، اضبط <Eye Sensor near object> الكتلة على "DownEye".
-
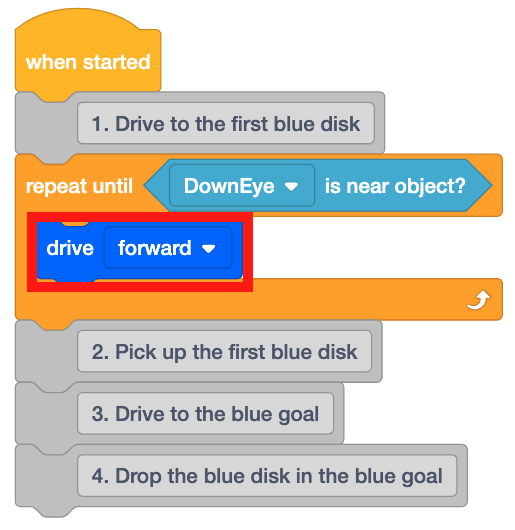
سيتم تشغيل الكتل الموجودة داخل كتلة [Repeat till] عندما لا يكتشف روبوت الواقع الافتراضي كائنًا. للوصول إلى أحد الأقراص، سيحتاج روبوت الواقع الافتراضي إلى التقدم إلى الأمام حتى يتم اكتشاف القرص.

-
اسحب كتلة [Drive] إلى كتلة [Repeat until].
-
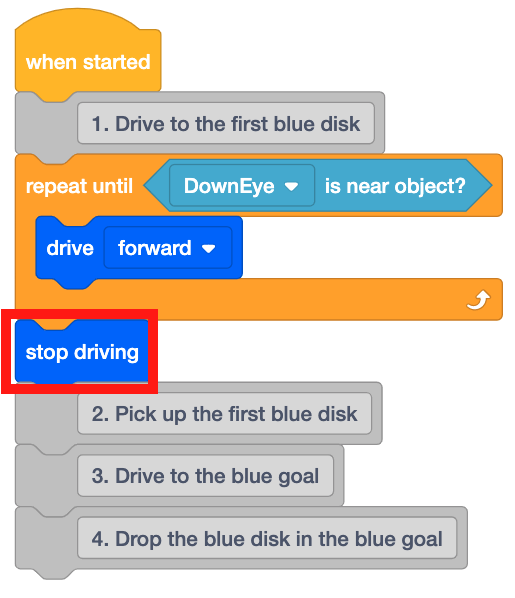
عند اكتشاف قرص، سيحتاج روبوت الواقع الافتراضي إلى التوقف عن القيادة لالتقاطه. اسحب كتلة [Stop driving] وضعها أسفل كتلة [Repeat until].
-
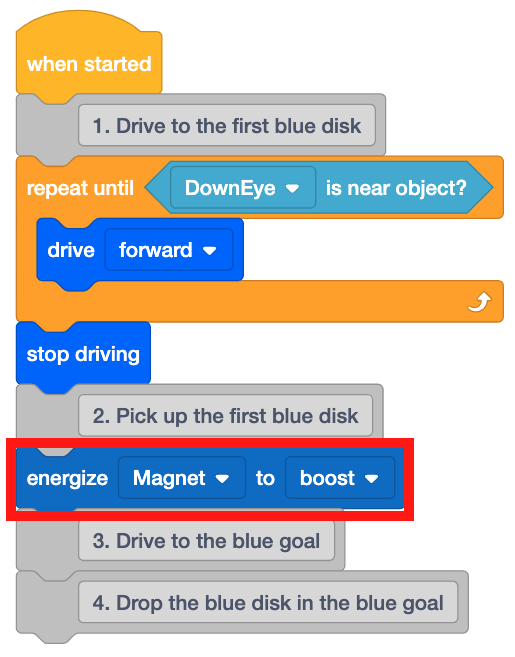
الآن، اطلب من روبوت الواقع الافتراضي التقاط القرص باستخدام المغناطيس الكهربائي عن طريق وضع كتلة [تنشيط المغناطيس الكهربائي] أسفل التعليق الثاني.
- افتح Disk Mover Playground إذا لم يكن مفتوحًا بالفعل وقم بتشغيل المشروع.
-
يتحرك روبوت الواقع الافتراضي للأمام حتى يتم اكتشاف القرص الأزرق الأول بواسطة مستشعر العين السفلي، ويتوقف عن القيادة، وينشط المغناطيس الكهربائي لالتقاط القرص.

- لاحظ كيف تعمل كتلة [Repeat until] في هذا المشروع.
- بمجرد أن يكتشف مستشعر العين السفلية على روبوت الواقع الافتراضي كائنًا، ينتقل المشروع إلى الكتلة التالية في المكدس أسفل كتلة [Repeat until].
- في هذا المشروع، كان هذا يعني توقف روبوت الواقع الافتراضي عن القيادة وتنشيط المغناطيس الكهربائي.
استخدام كتل المفاتيح
تعرض الصورة أدناه رسم سير عمل هذا الدرس باستخدام كتل التبديل. يمكن أن تساعدك مقارنة هذا الرسم بالرسم أعلاه على فهم سير عمل أوامر Switch Python الجديدة التي تتعلمها بشكل أفضل.
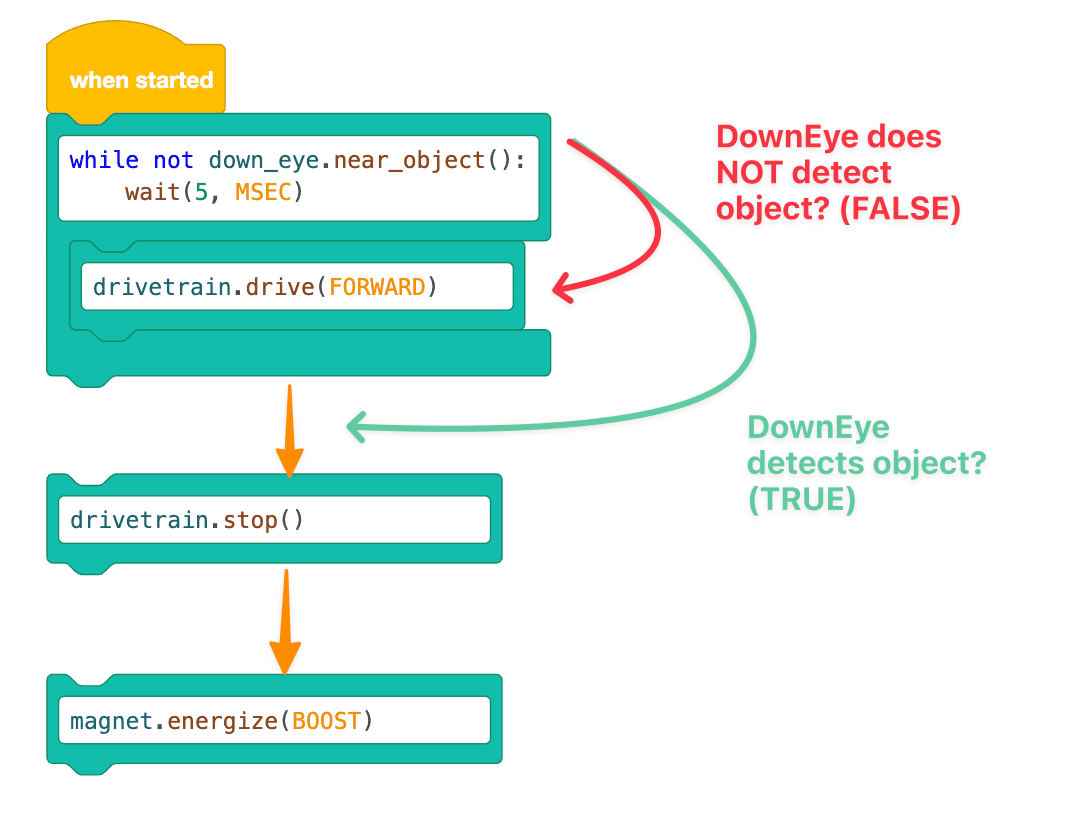
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.