
الدرس 3: استخدام ملاحظات المستشعر المبلغ عنها لوضع الأقراص في الهدف
في الدرس 2، عاد روبوت الواقع الافتراضي إلى نقطة البداية لإسقاط القرص. تطلب هذا من المستخدم حساب المسافة الدقيقة التي يقطعها روبوت الواقع الافتراضي. قد لا يكون هذا ممكنًا دائمًا. بدلاً من ذلك، يمكن لروبوت الواقع الافتراضي استخدام قيم المستشعر المبلغ عنها لالتقاط الأقراص وإفلاتها بدقة متسقة.
يستخدم الدرس 3 ملاحظات المستشعر المبلغ عنها لتحديد المكان الذي يجب أن يتوقف فيه روبوت الواقع الافتراضي عن القيادة عند العودة إلى الهدف. عند استخدام <Eye Sensor near object> الكتلة في وقت سابق من هذا الدرس، ليست هناك حاجة لمعرفة المسافة من الهدف إلى كل قرص.

سيعود روبوت الواقع الافتراضي نحو الهدف الأزرق باستخدام بيانات من مستشعر المسافة لتحديد مكان التوقف عن القيادة. بمجرد توقف روبوت الواقع الافتراضي داخل الهدف الأزرق، سيسقط روبوت الواقع الافتراضي القرص الأزرق.
- استمر في العمل في مشروع Unit8Lesson3.
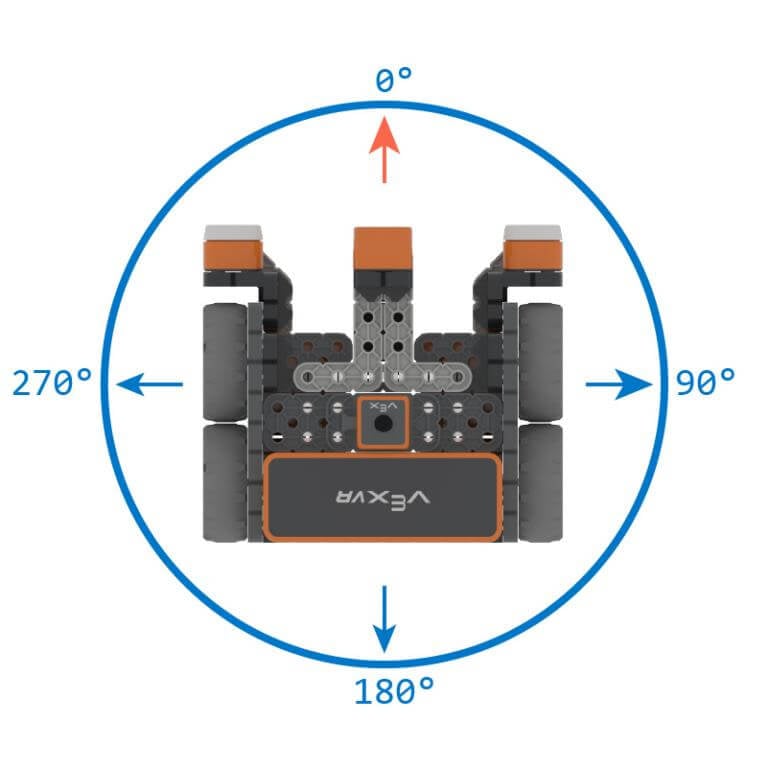
- يقيس مستشعر المسافة المسافة من مقدمة روبوت الواقع الافتراضي إلى أقرب جسم. لهذا السبب، سيحتاج روبوت الواقع الافتراضي إلى الدوران 180 درجة قبل العودة نحو الهدف الأزرق.
- سيستخدم روبوت الواقع الافتراضي مستشعر المسافة مع الجدار الخلفي للملعب من أجل تحديد مكان إسقاط القرص. لهذا السبب، سيحتاج روبوت الواقع الافتراضي إلى الدوران 180 درجة قبل العودة نحو الهدف الأزرق.
-
يمكن استخدام كتلة [انتقل إلى العنوان] لضمان تحول روبوت الواقع الافتراضي إلى العنوان الصحيح.
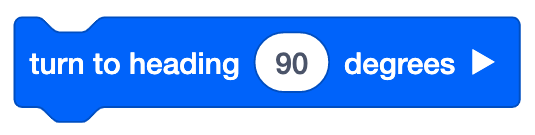
استخدام كتل المفاتيح
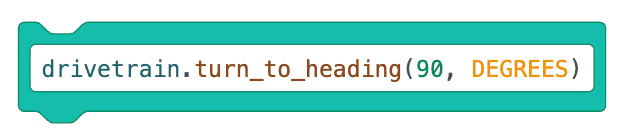
هذه هي كتلة التبديل [انتقل إلى العنوان]. يمكنك تعديل درجة الدوران عن طريق تغيير القيمة العددية بين القوسين. تذكر أنه يجب كتابة الرقم قبل وحدة القياس (الدرجات)، مفصولة بفاصلة.
لمعلوماتك
تحول كتلة [Turn to heading] روبوت الواقع الافتراضي إلى عنوان محدد باستخدام مستشعر الدوران. يتم تحديد الاتجاه الذي سيدور فيه روبوت الواقع الافتراضي (يسارًا أو يمينًا) بناءً على العنوان الحالي لمستشعر الدوران. يتم استخدام كتلة [Turn to heading] لتوجيه روبوت الواقع الافتراضي إلى عنوان معين بغض النظر عن موضع روبوت الواقع الافتراضي. عندما تلتقط قرصًا أو تسقطه، قد يخرج روبوت الواقع الافتراضي عن مساره. يضمن استخدام كتلة [Turn to heading] أن روبوت الواقع الافتراضي سيتحول إلى الموضع المطلق بدلاً من الموضع المتعلق بالعنوان السابق.
-
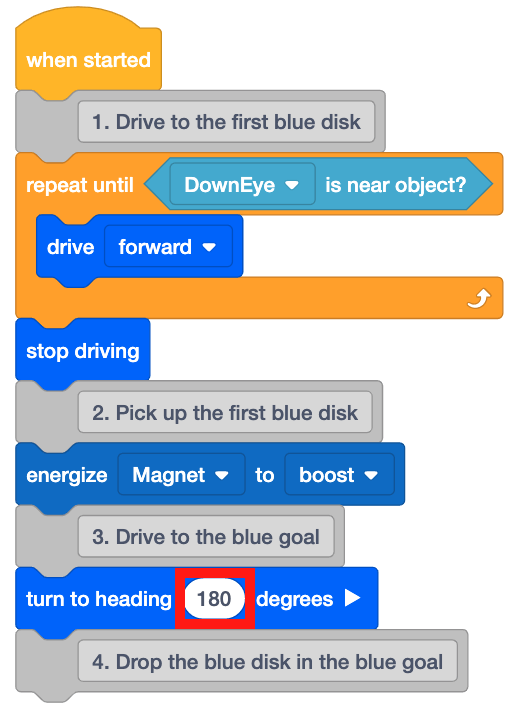
أضف كتلة [انتقل إلى العنوان] أسفل التعليق الثالث.

-
اضبط كتلة [Turn to heading] على 180 درجة.
-
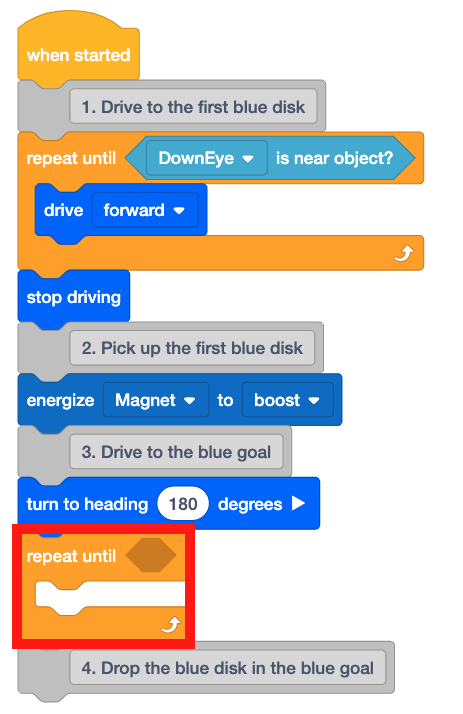
الآن بعد أن تم توجيه روبوت الواقع الافتراضي نحو نقطة البداية، سيحتاج روبوت الواقع الافتراضي إلى العودة إلى الهدف الأزرق. أضف كتلة [Repeat until] أسفل كتلة [Turn to heading].
-
للعودة إلى الهدف الأزرق، سيستخدم روبوت الواقع الافتراضي بيانات من مستشعر المسافة لتحديد متى يكون روبوت الواقع الافتراضي داخل الهدف الأزرق. كما تمت مناقشته في الدرس السابق، يبلغ قياس كل مربع شبكي في ساحة اللعب الخاصة بمحرك الأقراص 200 مليمتر (مم) في 200 مليمتر (مم).

-
باستخدام هذه القياسات، يمكن تحديد مركز الهدف الأزرق ليكون حوالي 200 ملليمتر (مم) من جدار الملعب.

-
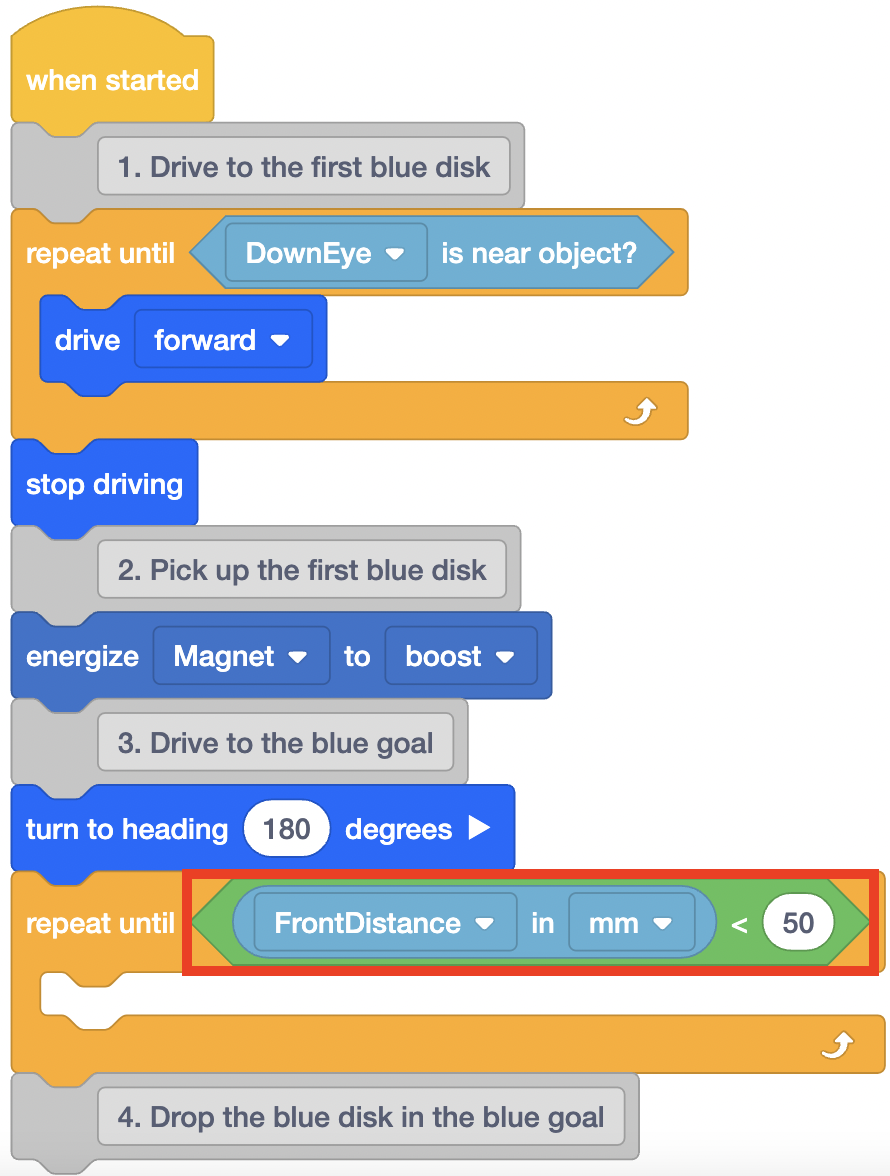
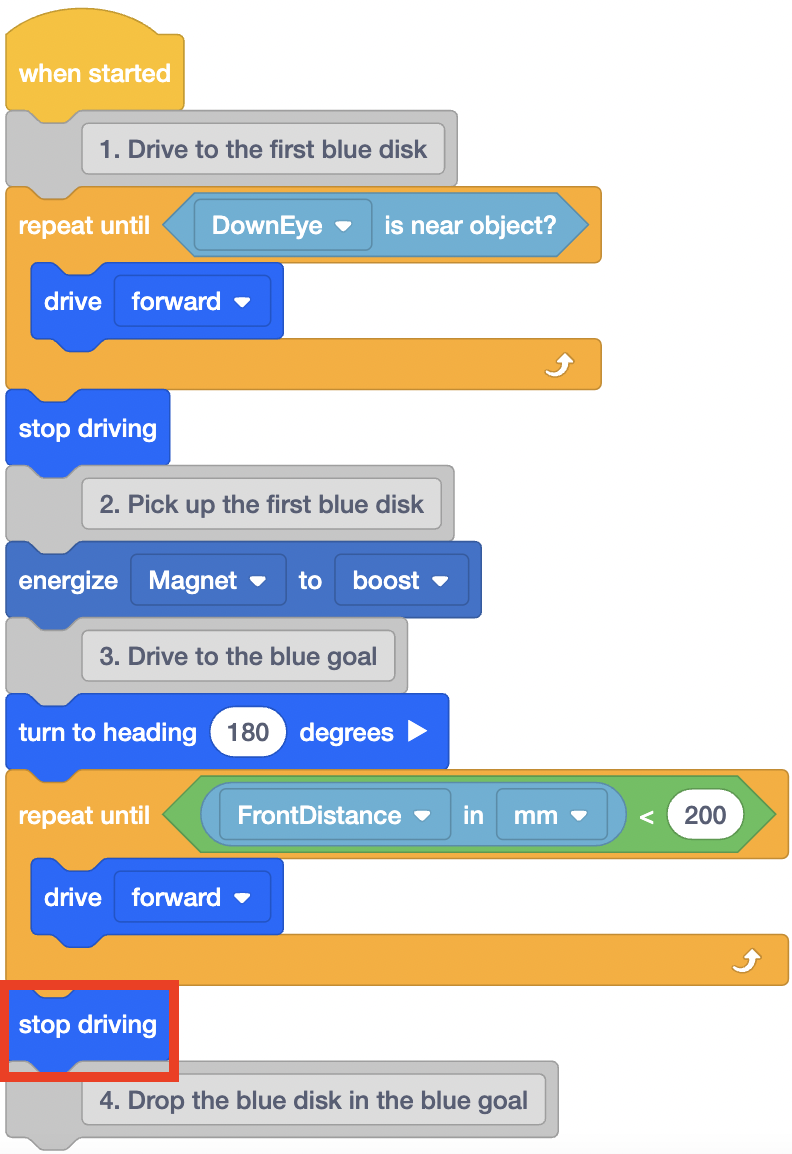
يجب أن يتوقف روبوت الواقع الافتراضي عن القيادة عندما يبلغ مستشعر المسافة أن روبوت الواقع الافتراضي أقل من 200 ملليمتر (مم) من جدار الملعب. أضف المكوّنات التالية إلى المكوّن [Repeat until].
-
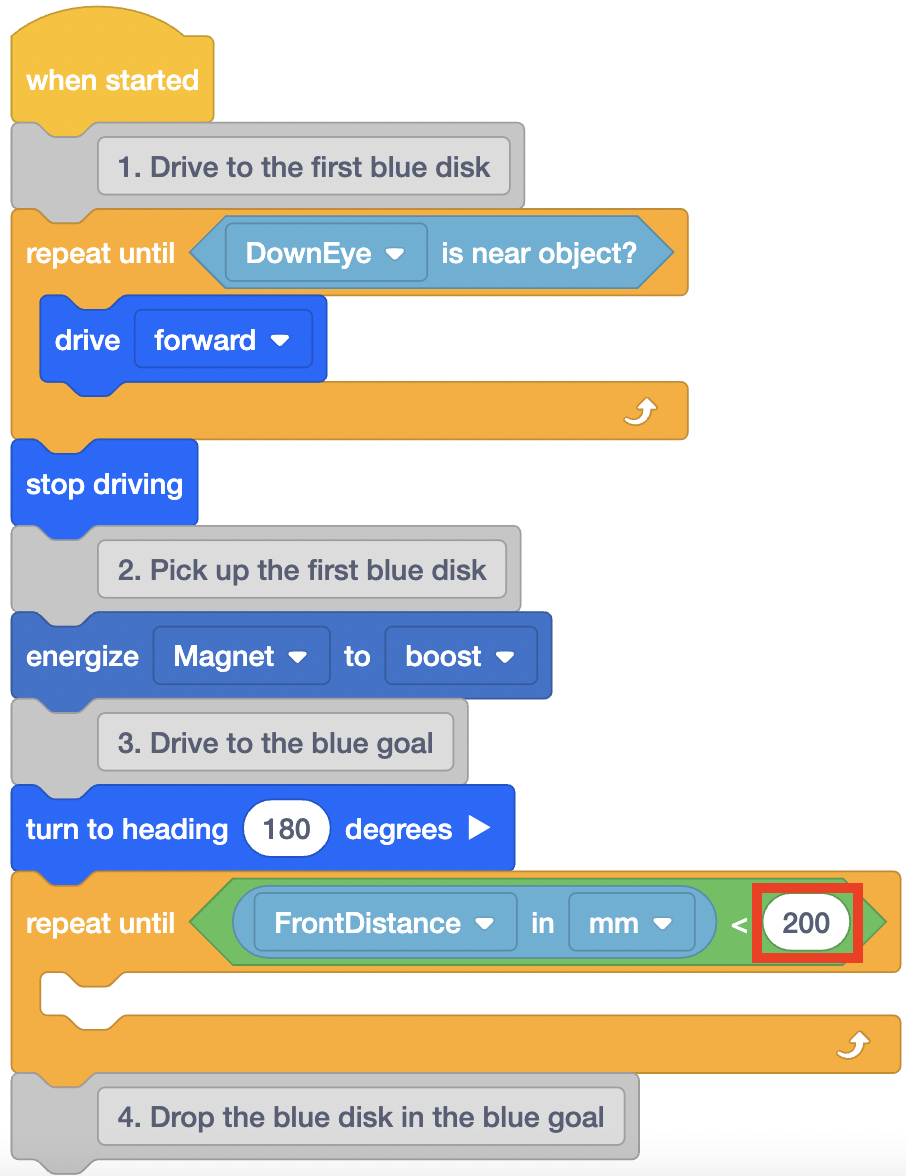
قم بتغيير المعلمة في <Less than> الكتلة إلى 200.
-
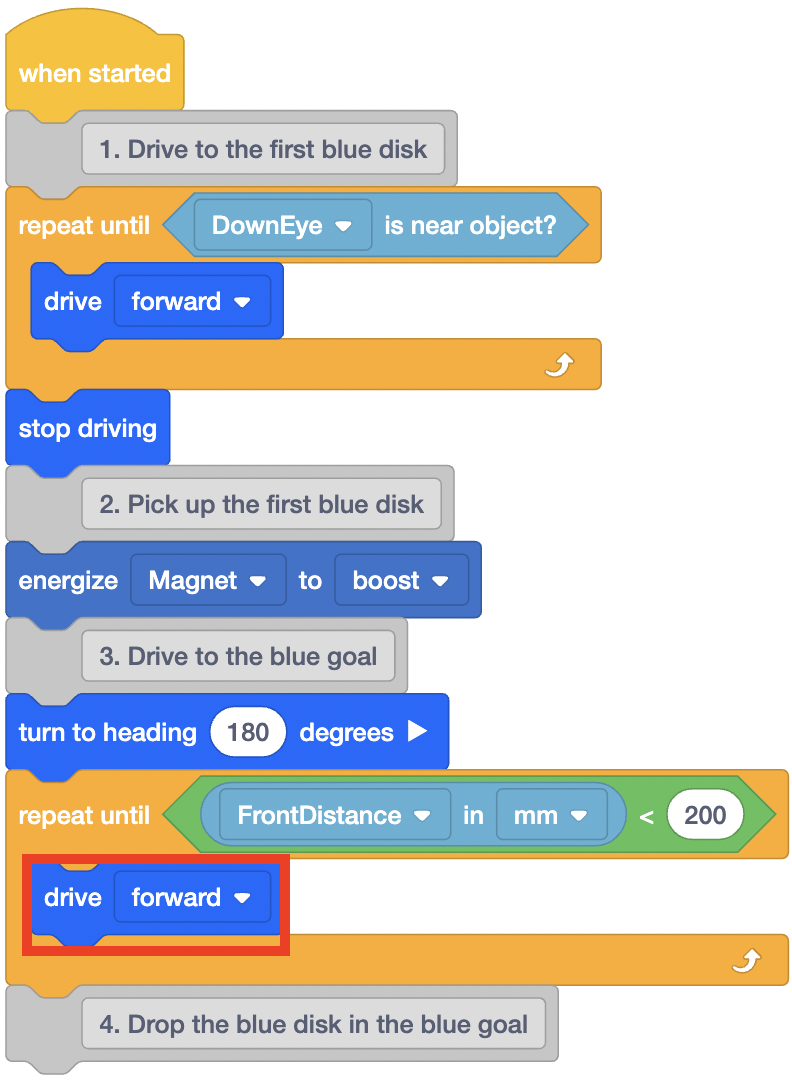
أضف كتلة [Drive] إلى كتلة [Repeat until] هذه. سيؤدي هذا إلى توجيه روبوت الواقع الافتراضي إلى الأمام حتى يبلغ مستشعر المسافة عن مسافة أقل من 200 ملليمتر (مم).
-
بمجرد وصول روبوت الواقع الافتراضي إلى الهدف الأزرق (200 مم من الحائط)، سيحتاج روبوت الواقع الافتراضي إلى التوقف عن القيادة. أضف كتلة [Stop driving] أسفل كتلة [Repeat until].
-
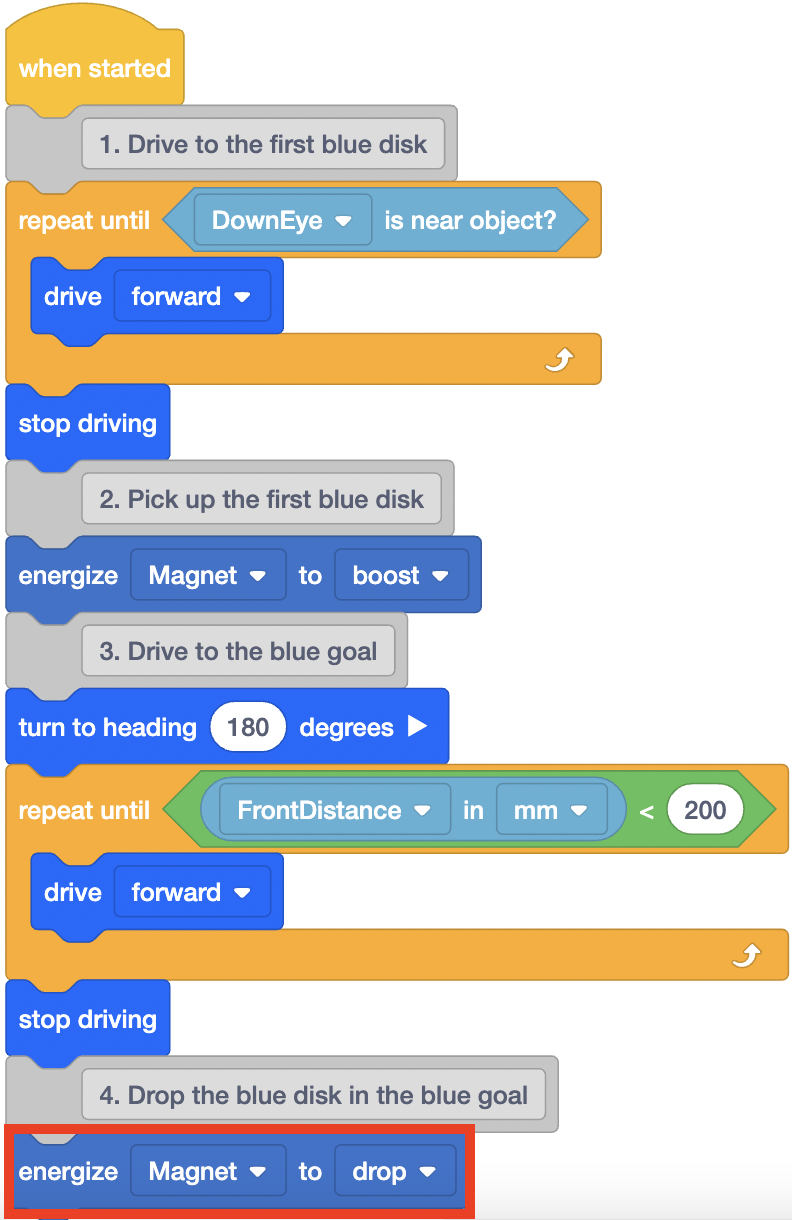
الآن بعد أن تم إيقاف روبوت الواقع الافتراضي في الهدف الأزرق، يمكنه إسقاط القرص. أضف كتلة [تنشيط المغناطيس الكهربائي] أسفل التعليق الرابع واضبط الكتلة على "إسقاط".
-
سيحتاج روبوت الواقع الافتراضي إلى القيادة في الاتجاه المعاكس لمسافة قصيرة لتجنب السقوط أو الاصطدام بأي أقراص. من المحتمل أن يؤدي الاصطدام بقرص إلى إخراج روبوت الواقع الافتراضي عن مساره. أضف الكتل التالية لتوجيه روبوت الواقع الافتراضي للقيادة في الاتجاه المعاكس لمدة 100 ملليمتر (مم) والعودة إلى اتجاه 0 درجة.

- افتح Disk Mover Playground إذا لم يكن مفتوحًا بالفعل وقم بتشغيل المشروع.
-
يتحرك روبوت الواقع الافتراضي للأمام، ويلتقط القرص الأول، ثم يتحول إلى اتجاه 180 درجة لمواجهة الهدف الأزرق. ثم يستخدم روبوت الواقع الافتراضي القيم من مستشعر المسافة لتحديد وقت التوقف عن القيادة وإسقاط القرص الأزرق.

- لاحظ كيف تعمل كتلة [Repeat until] الثانية في هذا الجزء من المشروع.
- عندما يكتشف مستشعر المسافة على روبوت الواقع الافتراضي أن جدار الملعب على بعد أقل من 200 ملليمتر (مم)، سينتقل المشروع إلى الكتلة التالية في المكدس أسفل كتلة [Repeat till].
- في هذا المشروع، هذا يعني أن روبوت الواقع الافتراضي يتوقف عن القيادة ويسقط المغناطيس الكهربائي في المرمى الأزرق.
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.