
পাঠ ৪: ওয়াল মেজ চ্যালেঞ্জ
এই ইউনিটের পূর্ববর্তী পাঠগুলিতে, আপনি শিখেছেন কিভাবে ওয়াল মেজ প্লেগ্রাউন্ডএর নির্দিষ্ট কিছু এলাকায় নেভিগেট করার জন্য দূরত্ব সেন্সর ব্যবহার করতে হয়। আগের ইউনিটে, আপনি বাম্পার সেন্সর ব্যবহার করে ওয়াল মেজ চ্যালেঞ্জটি সমাধান করেছেন। এখন, আপনি এই সমস্ত ধারণাগুলিকে একত্রিত করে শুরু থেকে শেষ পর্যন্ত ওয়াল মেজ চ্যালেঞ্জ সমাধানের জন্য একটি প্রকল্প তৈরি করবেন, কিন্তু এবার দূরত্ব সেন্সর দিয়ে!
শেখার ফলাফল
- দূরত্ব সেন্সর ব্যবহার করে ওয়াল মেজ সফলভাবে নেভিগেট করার জন্য ড্রাইভট্রেন, সেন্সিং এবং কন্ট্রোল বিভাগ থেকে ব্লকগুলি সঠিক ক্রমানুসারে প্রয়োগ করুন।
সবকিছু একসাথে করা
আগের ইউনিটে, আপনি বাম্পার সেন্সর ব্যবহার করে ওয়াল মেজ সমাধান করেছেন। এই ইউনিটে, আপনি একই ওয়াল মেজ সমাধান করবেন, কিন্তু পরিবর্তে দূরত্ব সেন্সর ব্যবহার করবেন। ওয়াল মেজ চ্যালেঞ্জটি যেকোনো সেন্সর ব্যবহার করে সমাধান করা যেতে পারে, তবে প্রতিটিরই সুবিধা রয়েছে।
| প্রতিটি সেন্সরের সুবিধা | |
|---|---|
|
বাম্পার সেন্সর
|
দূরত্ব সেন্সর
|
ওয়াল মেজ চ্যালেঞ্জ
এই চ্যালেঞ্জে, এমন একটি প্রকল্প তৈরি করুন যেখানে VR রোবট দূরত্ব সেন্সর ব্যবহার করে শুরু থেকে শেষ পর্যন্ত Wall Maze Playground নেভিগেট করবে।
চ্যালেঞ্জটি সম্পূর্ণ করতে এই পদক্ষেপগুলি অনুসরণ করুন:
-
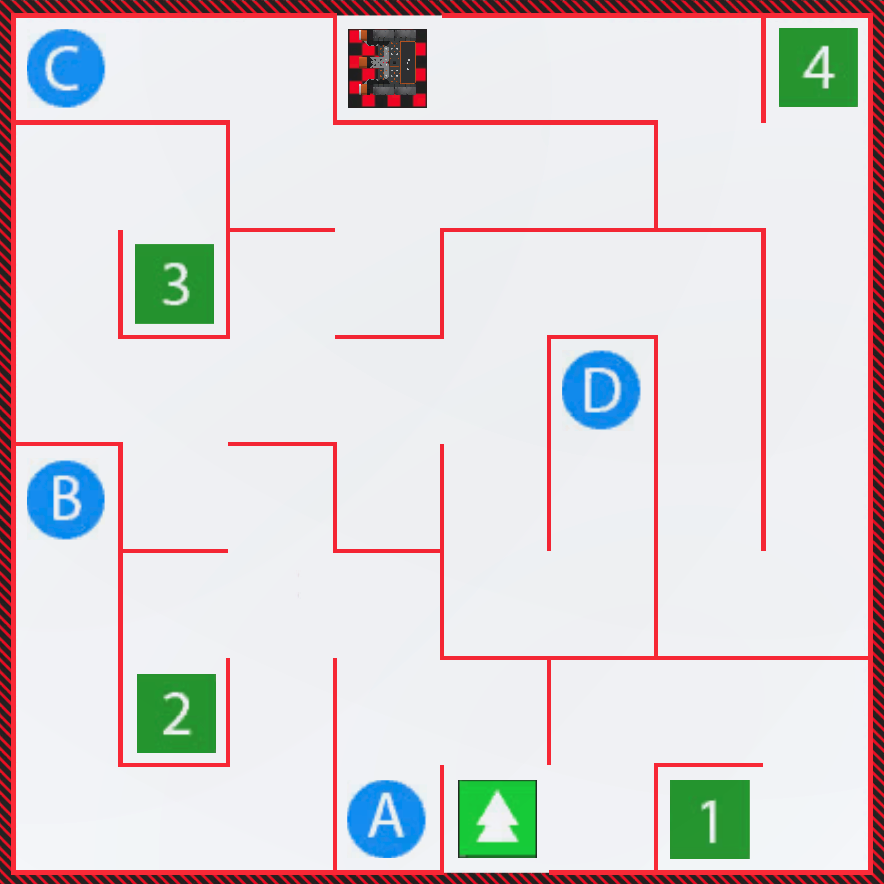
নিচের ভিডিও ক্লিপে, ভিআর রোবটটি আগের মতোই গাড়ি চালানো শুরু করে, যেমনটি আগে ৩ নম্বরে পৌঁছানোর জন্য করেছিল। যখন রোবটটি ৩ নম্বরটি পিছনে রেখে দেয়ালের দিকে মুখ করে, তখন রোবটটি ডানদিকে ঘুরবে গোলকধাঁধার ডান দিকে যাওয়ার জন্য। এটি D অক্ষরের চারপাশের দেয়ালের দিকে এগিয়ে যায়। রোবটটি বাম দিকে নেভিগেট করে, তারপর সামনের দিকে গাড়ি চালায় এবং পরিষ্কার পথে থাকার জন্য ডানদিকে মোড় নেয়। পরের দেয়ালে, রোবটটি বাম দিকে মোড় নেয় এবং দুবার এগিয়ে চলে যায় এবং একেবারে বাম দিকের দেয়াল ধরে পথ অনুসরণ করে। রোবটটি উপরের ডান কোণার দেয়াল থেকে প্রায় 300 মিমি দূরে থামে, বাম দিকে মোড় নেয় এবং ফিনিশিংয়ে পৌঁছানোর জন্য দুবার এগিয়ে যায়।
- একটি নতুন প্রকল্প তৈরি করুন বা এই ইউনিটের পূর্ববর্তী পাঠ থেকে একটি প্রকল্প লোড করুন। যদি নতুন কোনও প্রকল্প তৈরি করেন, তাহলে অনুরোধ করা হলে ওয়াল মেজ প্লেগ্রাউন্ড নির্বাচন করুন। মনে রাখবেন যে একটি VR প্রিমিয়াম অ্যাকাউন্টের মাধ্যমে, আপনি আপনার প্রকল্প তৈরি করতে VEXcode ব্লক এবং সুইচ ব্লক উভয়ের সমন্বয় ব্যবহার করতে পারেন।
- প্রকল্পটির নাম পরিবর্তন করুন Unit5 Challenge।
- খেলার মাঠের উইন্ডোটি চালু করুন।
- ওয়াল মেজ খেলার মাঠলোড করুন।
- ওয়াল গোলকধাঁধার শুরু থেকে শেষ পর্যন্ত VR রোবট নেভিগেট করার জন্য প্রয়োজনীয় ব্লক যোগ করুন।
- এটি কাজ করে কিনা তা পরীক্ষা করার জন্য প্রকল্পটি শুরু করুন।
- প্রকল্প সফল না হলে, সম্পাদনা করুন এবং আবার চেষ্টা করুন। VR রোবট শুরু থেকে শেষ পর্যন্ত সফলভাবে ড্রাইভ না করা পর্যন্ত প্রজেক্টটি সংশোধন এবং চালানো চালিয়ে যান।
- VR রোবট সফলভাবে শেষ করার পর প্রকল্পটি সংরক্ষণ করুন।
অভিনন্দন! আপনি ওয়াল মেজ চ্যালেঞ্জ সফলভাবে সম্পন্ন করেছেন!