
บทที่ 4: การท้าทายเขาวงกตกำแพง
ในบทเรียนก่อนหน้านี้ภายในหน่วยนี้คุณได้เรียนรู้วิธีใช้เซ็นเซอร์ระยะทางเพื่อนำทางไปยังบางพื้นที่ใน Wall MazePlayground ในยูนิตก่อนหน้านี้คุณได้แก้ปัญหา Wall Maze Challenge โดยใช้เซ็นเซอร์กันชน ตอนนี้คุณจะรวมแนวคิดทั้งหมดเหล่านี้เพื่อสร้างโครงการเพื่อแก้ปัญหา Wall Maze Challenge ตั้งแต่ต้นจนจบอีกครั้งแต่คราวนี้มาพร้อมกับเซ็นเซอร์ระยะทาง!
ผลการเรียนรู้
- ใช้บล็อกจากหมวดหมู่ Drivetrain, Sensing และ Control ตามลำดับที่ถูกต้องเพื่อนำทาง Wall Maze ให้สำเร็จโดยใช้เซ็นเซอร์ระยะทาง
รวมทุกอย่างเข้าด้วยกัน
ในยูนิตก่อนหน้านี้คุณได้แก้เขาวงกตติดผนังโดยใช้เซ็นเซอร์กันชน ในยูนิตนี้คุณจะแก้ปัญหาเขาวงกตติดผนังเดียวกันแต่ใช้เซ็นเซอร์ระยะทางแทน การท้าทายกำแพงเขาวงกตสามารถแก้ไขได้โดยใช้เซ็นเซอร์อย่างใดอย่างหนึ่งแต่มีข้อดีสำหรับแต่ละคน
| ข้อดีของเซ็นเซอร์แต่ละตัว | |
|---|---|
|
เซ็นเซอร์กันชน
|
เซ็นเซอร์ระยะทาง
|
Wall Maze Challenge
ในความท้าทายนี้ให้สร้างโครงการที่หุ่นยนต์ VR นำทาง Wall Maze Playground ตั้งแต่ต้นจนจบโดยใช้เซ็นเซอร์ระยะทาง
ทำตามขั้นตอนต่อไปนี้เพื่อทำการท้าทายให้เสร็จ:
-
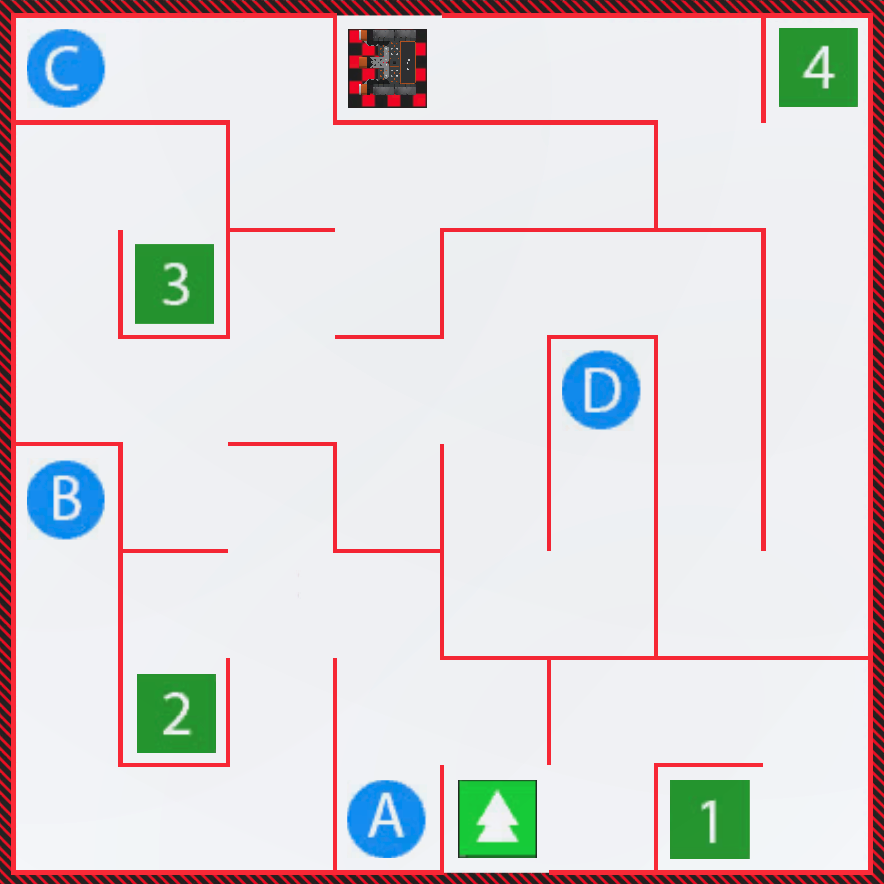
ในคลิปวิดีโอด้านล่างหุ่นยนต์ VR จะเริ่มขับรถตามที่ทำเพื่อไปถึงหมายเลข 3 ก่อนหน้านี้ เมื่อหุ่นยนต์หันหน้าเข้าหาผนังโดยมีหมายเลข 3 อยู่ด้านหลังหุ่นยนต์จะหันไปทางขวาเพื่อมุ่งหน้าไปทางขวามือของเขาวงกต มันขับไปข้างหน้าไปยังกำแพงล้อมรอบตัวอักษร D หุ่นยนต์นำทางไปทางซ้ายจากนั้นขับไปข้างหน้าและเลี้ยวขวาเพื่ออยู่บนเส้นทางที่ชัดเจน กำแพงถัดไปหุ่นยนต์จะเลี้ยวซ้ายและขับไปข้างหน้าสองครั้งเพื่อไปตามเส้นทางตามกำแพงด้านซ้ายสุด หุ่นยนต์หยุดห่างจากผนังมุมขวาบนประมาณ 300 มม. เลี้ยวซ้ายและขับไปข้างหน้าสองครั้งเพื่อไปถึงเส้นชัย
- สร้างโครงการใหม่หรือโหลดโครงการจากบทเรียนก่อนหน้าในหน่วยนี้ หากสร้างโปรเจกต์ใหม่ให้เลือก Wall Maze Playground เมื่อได้รับแจ้ง โปรดจำไว้ว่าด้วยบัญชี VR Premium คุณ อาจใช้การรวมกันของทั้งบล็อก VEXcode และสลับบล็อกเพื่อสร้างโปรเจกต์ของคุณ
- เปลี่ยนชื่อโปร เจกต์Unit5Challenge
- เปิดหน้าต่างสนามเด็กเล่น
- โหลด Wall MazePlayground
- เพิ่มบล็อกที่จำเป็นเพื่อนำทางหุ่นยนต์ VR ตั้งแต่ต้นจนจบของเขาวงกตติดผนัง
- เริ่มโครงการเพื่อทดสอบว่าได้ผลหรือไม่
- หากโปรเจกต์ไม่สำเร็จให้แก้ไขแล้วลองอีกครั้ง ดำเนินการแก้ไขและเรียกใช้โครงการต่อไปจนกว่าหุ่นยนต์ VR จะขับรถได้สำเร็จตั้งแต่ต้นจนจบ
- บันทึกโครงการเมื่อ VR Robot ประสบความสำเร็จในการขับเคลื่อนจนเสร็จสิ้น
ขอแสดงความยินดี! คุณได้ทำการท้าทาย Wall Maze สำเร็จแล้ว!