
পাঠ ৩: ডিস্ক সংগ্রহের জন্য রিপোর্ট করা সেন্সর প্রতিক্রিয়া ব্যবহার করা
এই পাঠে পাঠ ২-এর মতো একই চ্যালেঞ্জ সমাধানের জন্য রিপোর্ট করা সেন্সর প্রতিক্রিয়া ব্যবহার করা হবে। ভিআর রোবটটি প্রথম নীল ডিস্কটি তুলে নীল গোলকটিতে স্থানান্তর করবে।
-
VEXcode VR-এ একটি নতুন প্রকল্প শুরু করুন এবং প্রকল্পটির নাম দিন Unit8Lesson3।

-
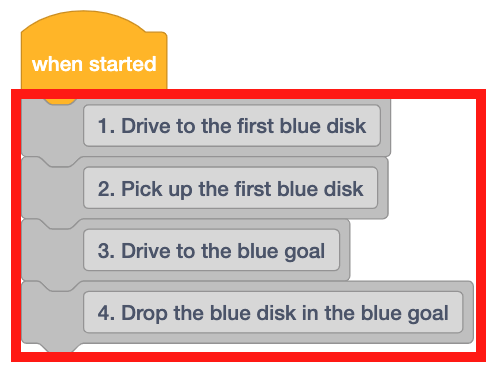
কর্মক্ষেত্রে চারটি মন্তব্য ব্লক টেনে আনুন। VR রোবট প্রথম ডিস্কে ড্রাইভ করার জন্য প্রয়োজনীয় প্রতিটি পদক্ষেপের জন্য মন্তব্য যোগ করুন, এটি তুলে নিন এবং এটিকে নীল লক্ষ্যে ফিরিয়ে দিন।
-
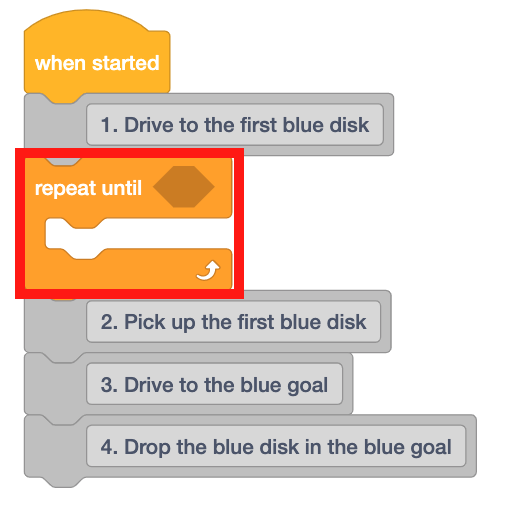
প্রথম মন্তব্যের নীচে কর্মক্ষেত্রে একটি [পুনরাবৃত্ত না হওয়া পর্যন্ত] ব্লক টানুন।
আপনার তথ্যের জন্য
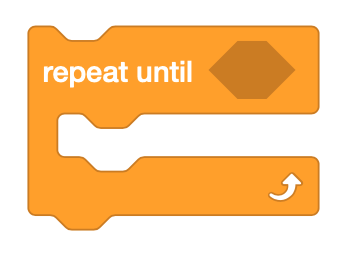
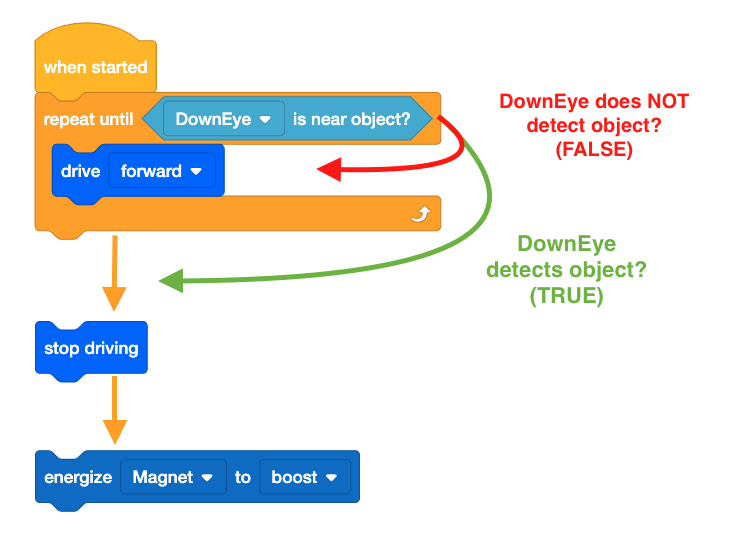
[যতক্ষণ না পর্যন্ত পুনরাবৃত্তি করুন] ব্লক হল একটি সি ব্লক যা বুলিয়ান রিপোর্টার ব্লক গ্রহণ করে। [পর্যন্ত পুনরাবৃত্তি করুন] ব্লক প্রতিটি লুপের শুরুতে শুধুমাত্র বুলিয়ান অবস্থা পরীক্ষা করবে। যদি বুলিয়ান কন্ডিশনটি FALSE হিসেবে রিপোর্ট করা হয়, তাহলে ভিতরের ব্লকগুলো চলবে। যদি বুলিয়ান শর্তটি সত্য হিসাবে রিপোর্ট করা হয়, তাহলে ভিতরের ব্লকগুলি এড়িয়ে যাবে।
-
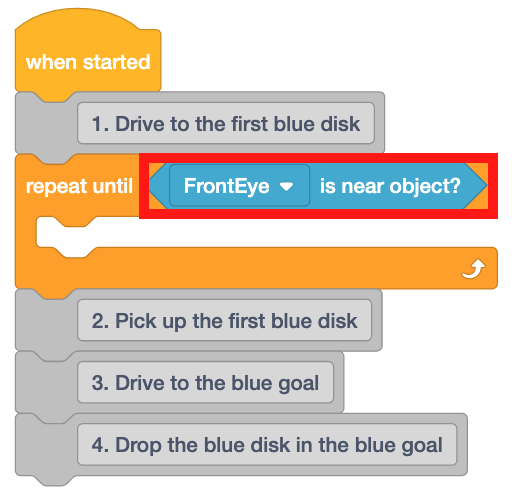
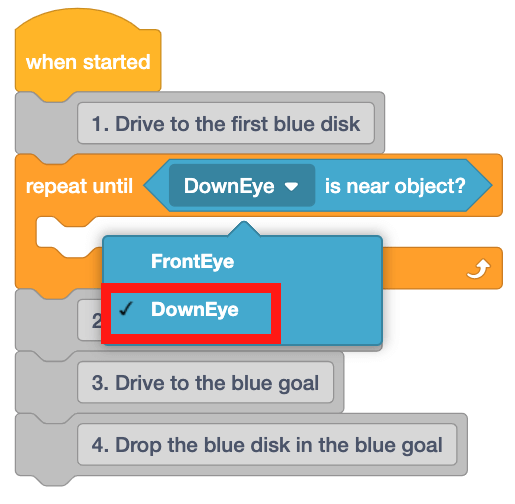
যখন VR রোবট ডিস্ক মুভার প্লেগ্রাউন্ড-এ একটি রঙিন ডিস্ক সনাক্ত করে তখন <Eye Sensor near object> ব্লকটি সত্য বলে রিপোর্ট করে। এই ব্লকটি প্রকল্পে টেনে আনুন।
-
ডিস্ক মুভার প্লেগ্রাউন্ড এর ডিস্কগুলি খেলার মাঠের মেঝেতে রয়েছে এবং ফ্রন্ট আই সেন্সর দ্বারা সনাক্ত করা যায় না। এই কারণে, 'DownEye'-তে <Eye Sensor near object> ব্লক সেট করুন।
-
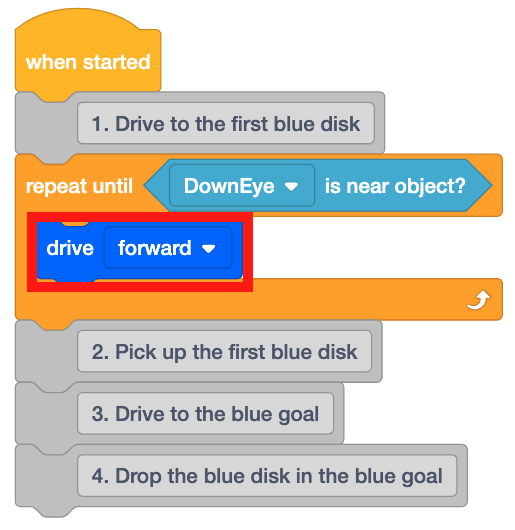
VR রোবট কোনো বস্তু সনাক্ত না করলে ব্লকের ভিতরের ব্লকগুলি [রিপিট না হওয়া পর্যন্ত] চলবে। ডিস্কগুলির একটিতে পৌঁছানোর জন্য, ডিস্কটি সনাক্ত না হওয়া পর্যন্ত ভিআর রোবটটিকে এগিয়ে যেতে হবে।

-
একটি [ড্রাইভ] ব্লক টেনে আনুন [পর্যন্ত পুনরাবৃত্তি করুন] ব্লকে।
-
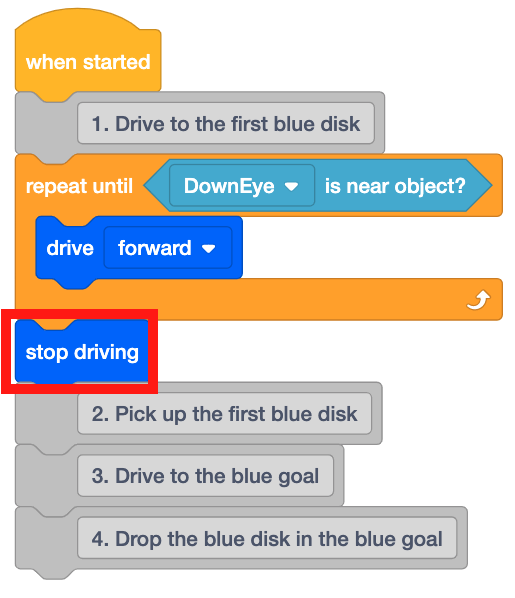
যখন একটি ডিস্ক সনাক্ত করা হয়, VR রোবটটিকে এটি বাছাই করার জন্য গাড়ি চালানো বন্ধ করতে হবে। একটি [ড্রাইভিং বন্ধ করুন] ব্লক টেনে আনুন এবং এটিকে [পর্যন্ত পুনরাবৃত্তি করুন] ব্লকের নীচে রাখুন।
-
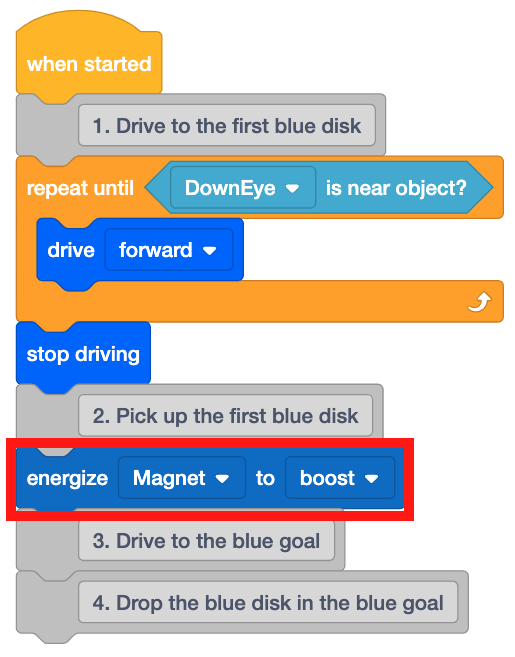
এখন, দ্বিতীয় মন্তব্যের নিচে একটি [Energize Electromagnet] ব্লক স্থাপন করে VR রোবটকে ইলেক্ট্রোম্যাগনেটের সাথে ডিস্কটি নিতে নির্দেশ দিন।
- ডিস্ক মুভার প্লেগ্রাউন্ড খুলুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
-
ডাউন আই সেন্সর দ্বারা প্রথম নীল ডিস্ক সনাক্ত না হওয়া পর্যন্ত ভিআর রোবট এগিয়ে যায়, গাড়ি চালানো বন্ধ করে এবং ডিস্কটি তোলার জন্য ইলেক্ট্রোম্যাগনেটকে শক্তি দেয়।

- এই প্রকল্পে ব্লক কিভাবে কাজ করে তা লক্ষ্য করুন।
- একবার ভিআর রোবটের ডাউন আই সেন্সর একটি বস্তু শনাক্ত করলে, প্রকল্পটি [পর্যন্ত পুনরাবৃত্তি] ব্লকের নীচে স্ট্যাকের পরবর্তী ব্লকে চলে যায়।
- এই প্রকল্পে, এর অর্থ হল VR রোবট গাড়ি চালানো বন্ধ করে দিয়েছে এবং ইলেক্ট্রোম্যাগনেটকে শক্তিশালী করেছে।
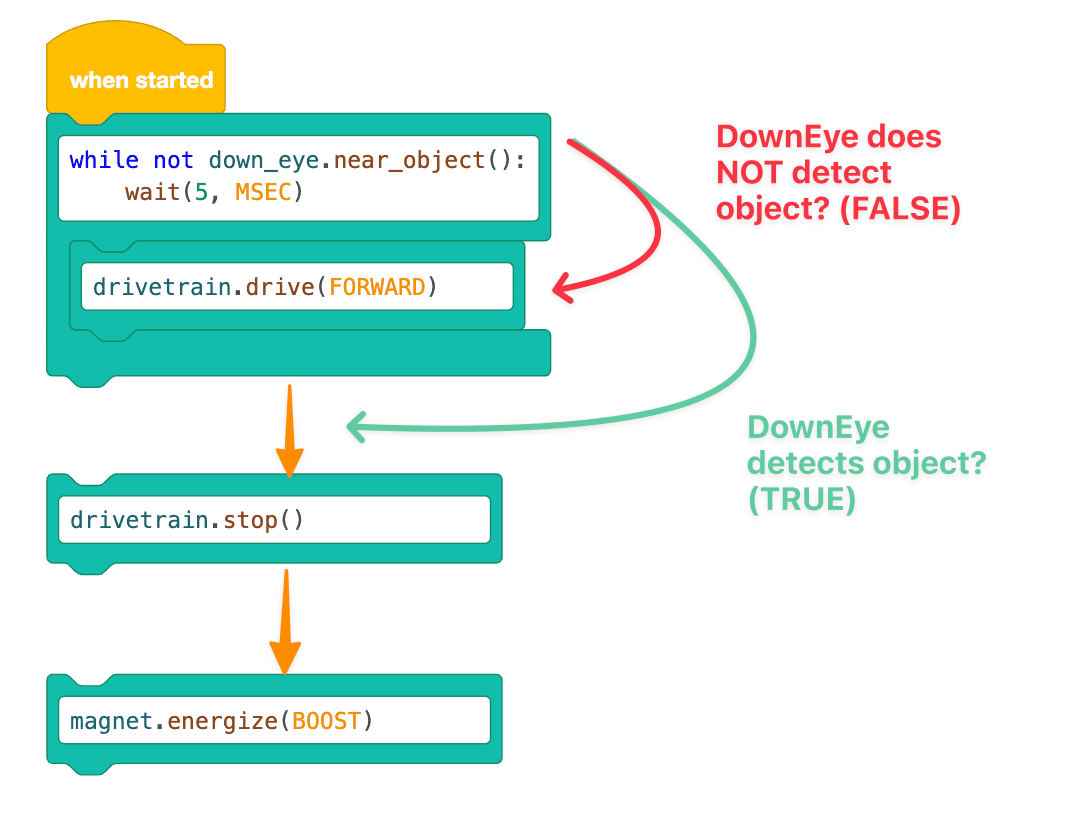
সুইচ ব্লক ব্যবহার করা
নিচের ছবিটি সুইচ ব্লক ব্যবহার করে এই পাঠের ওয়ার্কফ্লো গ্রাফিক প্রদর্শন করে। উপরের গ্রাফিকের সাথে এই গ্রাফিকের তুলনা করলে আপনি যে নতুন সুইচ পাইথন কমান্ডগুলি শিখছেন তার কর্মপ্রবাহ আরও ভালভাবে বুঝতে পারবেন।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।