
পাঠ ৩: লক্ষ্যে ডিস্ক স্থাপনের জন্য রিপোর্ট করা সেন্সর প্রতিক্রিয়া ব্যবহার করা
দ্বিতীয় পাঠে, ভিআর রোবটটি ডিস্ক থেকে নামানোর জন্য উল্টো দিকে গাড়ি চালিয়ে শুরুর দিকে ফিরে গিয়েছিল। এর জন্য ব্যবহারকারীকে ভিআর রোবটটির ভ্রমণের সঠিক দূরত্ব গণনা করতে হয়েছিল। এটা সবসময় সম্ভব নাও হতে পারে। পরিবর্তে, ভিআর রোবট রিপোর্ট করা সেন্সর মান ব্যবহার করে ধারাবাহিক নির্ভুলতার সাথে ডিস্কগুলি তুলে এবং ফেলে দিতে পারে।
পাঠ ৩-এ রিপোর্ট করা সেন্সর প্রতিক্রিয়া ব্যবহার করে নির্ধারণ করা হয়েছে যে লক্ষ্যে ফিরে আসার সময় VR রোবট কোথায় গাড়ি চালানো বন্ধ করবে। এই পাঠের আগে <Eye Sensor near object> ব্লক ব্যবহার করার সময়, লক্ষ্য থেকে প্রতিটি ডিস্কের দূরত্ব জানার প্রয়োজন নেই।

ভিআর রোবটটি দূরত্ব সেন্সর থেকে প্রাপ্ত তথ্য ব্যবহার করে নীল লক্ষ্যের দিকে ফিরে যাবে এবং কোথায় গাড়ি চালানো বন্ধ করতে হবে তা নির্ধারণ করবে। একবার ভিআর রোবটটি নীল গোলের ভিতরে থেমে গেলে, ভিআর রোবটটি নীল ডিস্কটি ফেলে দেবে।
- Unit8Lesson3 প্রকল্পে কাজ চালিয়ে যান।
- দূরত্ব সেন্সরটি ভিআর রোবটের সামনের দিক থেকে নিকটতম বস্তুর দূরত্ব পরিমাপ করে। এই কারণে, ভিআর রোবটটিকে নীল লক্ষ্যের দিকে ফিরে যাওয়ার আগে ১৮০ ডিগ্রি ঘুরতে হবে।
- ভিআর রোবটটি খেলার মাঠের পিছনের দেয়ালের সাথে দূরত্ব সেন্সর ব্যবহার করবে যাতে ডিস্কটি কোথায় ফেলতে হবে তা নির্ধারণ করা যায়। এই কারণে, ভিআর রোবটটিকে নীল লক্ষ্যের দিকে ফিরে যাওয়ার আগে ১৮০ ডিগ্রি ঘুরতে হবে।
-
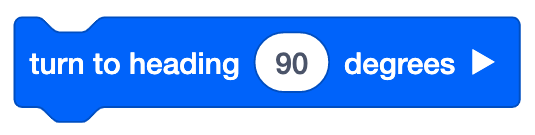
VR রোবট সঠিক শিরোনামে পরিণত হয়েছে তা নিশ্চিত করতে [শিরোনামের দিকে ঘুরুন] ব্লকটি ব্যবহার করা যেতে পারে।
সুইচ ব্লক ব্যবহার করা
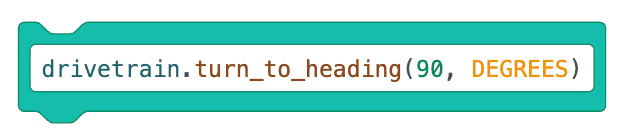
এটি হল [শিরোনামে ঘুরুন] ব্লক। বন্ধনীর সংখ্যাসূচক মান পরিবর্তন করে আপনি ঘূর্ণনের মাত্রা পরিবর্তন করতে পারেন। মনে রাখবেন যে সংখ্যাটি পরিমাপের এককের (DEGREES) আগে লিখতে হবে, একটি কমা দ্বারা পৃথক করে।
আপনার তথ্যের জন্য
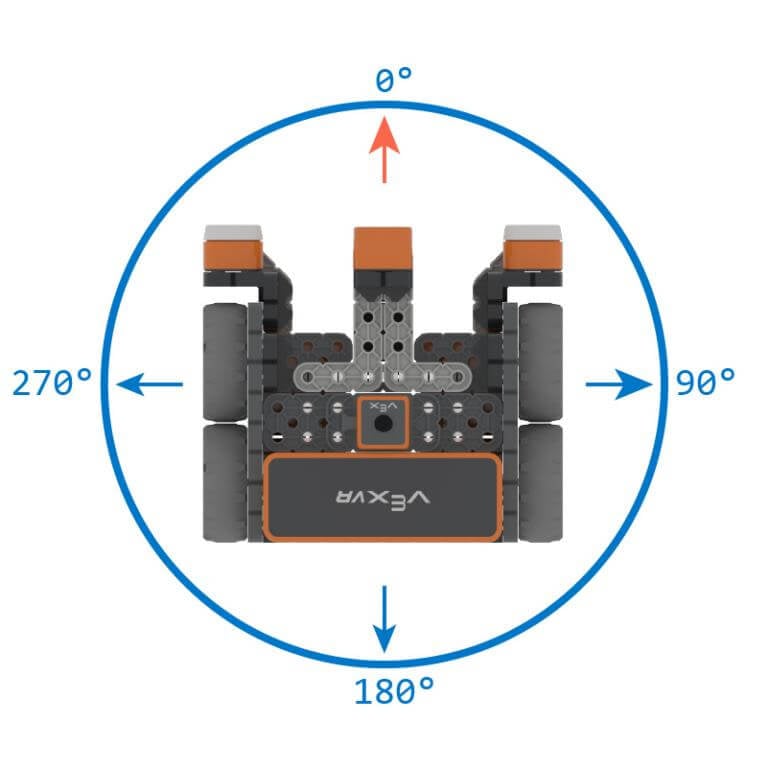
[শিরোনামের দিকে ঘুরুন] ব্লকটি ভিআর রোবটকে গাইরো সেন্সর ব্যবহার করে একটি নির্দিষ্ট শিরোনামে পরিণত করে। VR রোবট যে দিকে ঘুরবে (বাম বা ডানে) তা জাইরো সেন্সরের বর্তমান শিরোনামের উপর ভিত্তি করে নির্ধারিত হয়। [ শিরোনামের দিকে ঘুরুন] ব্লকটি ভিআর রোবটকে ভিআর রোবটের অবস্থান নির্বিশেষে একটি নির্দিষ্ট শিরোনামে নির্দেশ করতে ব্যবহৃত হয়। আপনি একটি ডিস্ক বাছাই বা ফেলে দেওয়ার সাথে সাথে VR রোবটটি অবশ্যই ছিটকে যেতে পারে। [শিরোনামের দিকে ঘুরুন] ব্লকটি ব্যবহার করে নিশ্চিত করে যে VR রোবট পূর্বের শিরোনামের সাথে সম্পর্কিত অবস্থানের পরিবর্তে পরম অবস্থানে ফিরে যাবে।
-
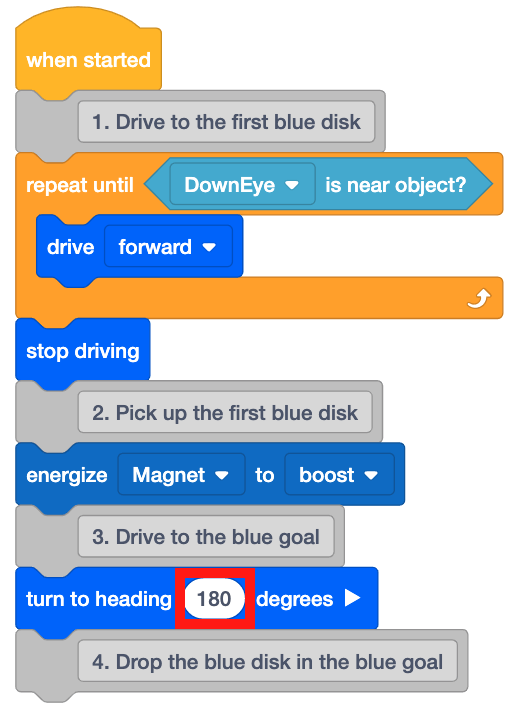
তৃতীয় মন্তব্যের নিচে একটি [শিরোনামের দিকে ঘুরুন] ব্লক যোগ করুন।

-
[শিরোনামের দিকে ঘুরুন] ব্লকটিকে 180 ডিগ্রিতে সেট করুন।
-
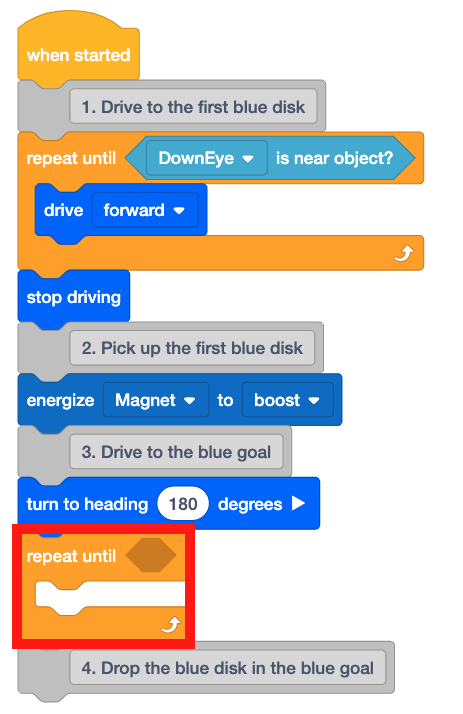
এখন যেহেতু VR রোবটটি প্রারম্ভিক অবস্থানের দিকে পরিচালিত হয়েছে, VR রোবটটিকে নীল লক্ষ্যে ফিরে যেতে হবে। [শিরোনামের দিকে বাঁক] ব্লকের নীচে একটি [পুনরাবৃত্ত না হওয়া পর্যন্ত] ব্লক যোগ করুন।
-
নীল লক্ষ্যে ফিরে যাওয়ার জন্য, VR রোবটটি দূরত্ব সেন্সর থেকে ডেটা ব্যবহার করবে কখন VR রোবট নীল গোলের ভিতরে আছে। আগের পাঠে যেমন আলোচনা করা হয়েছে, ডিস্ক মুভার প্লেগ্রাউন্ড এর প্রতিটি গ্রিড বর্গক্ষেত্র 200 মিলিমিটার (মিমি) বাই 200 মিলিমিটার (মিমি) পরিমাপ করে।

-
এই পরিমাপগুলি ব্যবহার করে, নীল লক্ষ্যের কেন্দ্রটি খেলার মাঠের প্রাচীর থেকে প্রায় 200 মিলিমিটার (মিমি) হতে নির্ধারণ করা যেতে পারে।

-
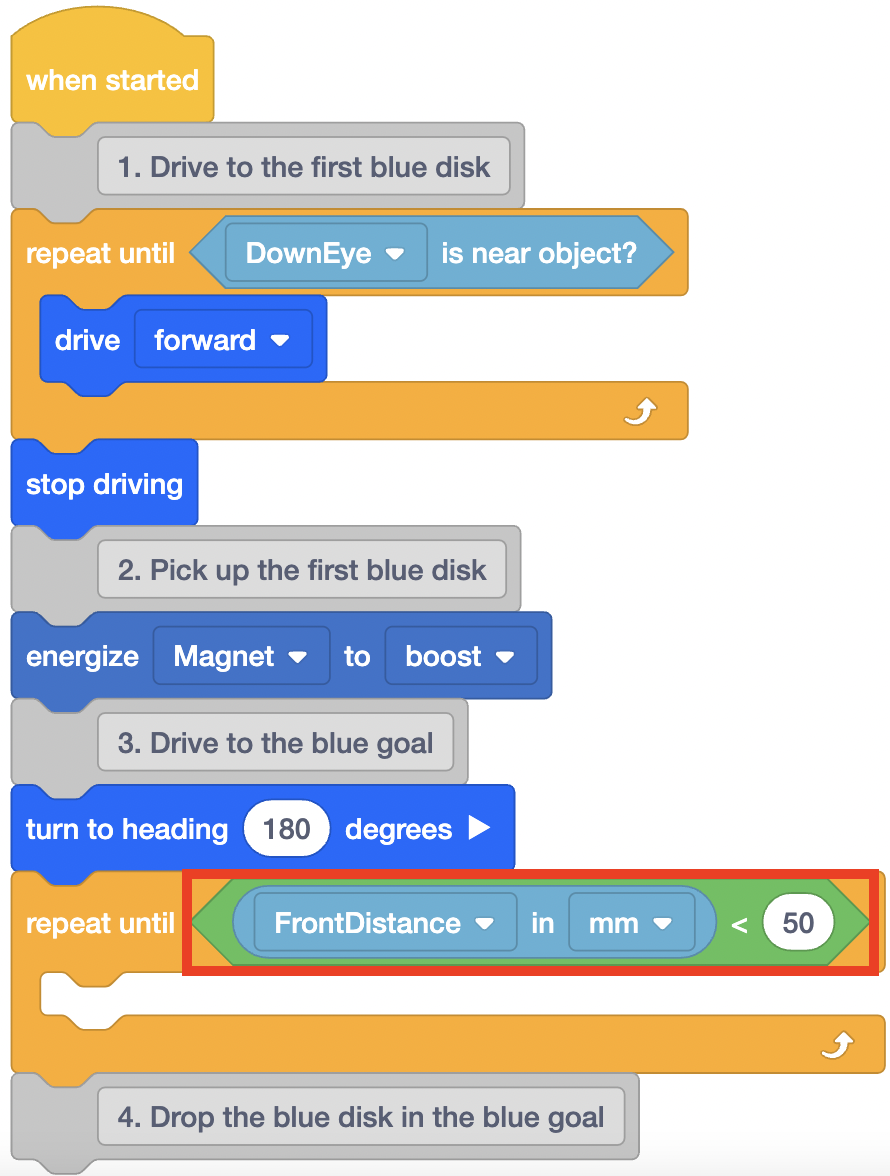
যখন দূরত্ব সেন্সর রিপোর্ট করে যে VR রোবটটি খেলার মাঠের প্রাচীর থেকে 200 মিলিমিটার (মিমি) এর চেয়ে কম দূরে রয়েছে তখন VR রোবটটিকে গাড়ি চালানো বন্ধ করা উচিত। [পর্যন্ত পুনরাবৃত্তি করুন] ব্লকে নিম্নলিখিত ব্লকগুলি যুক্ত করুন।
-
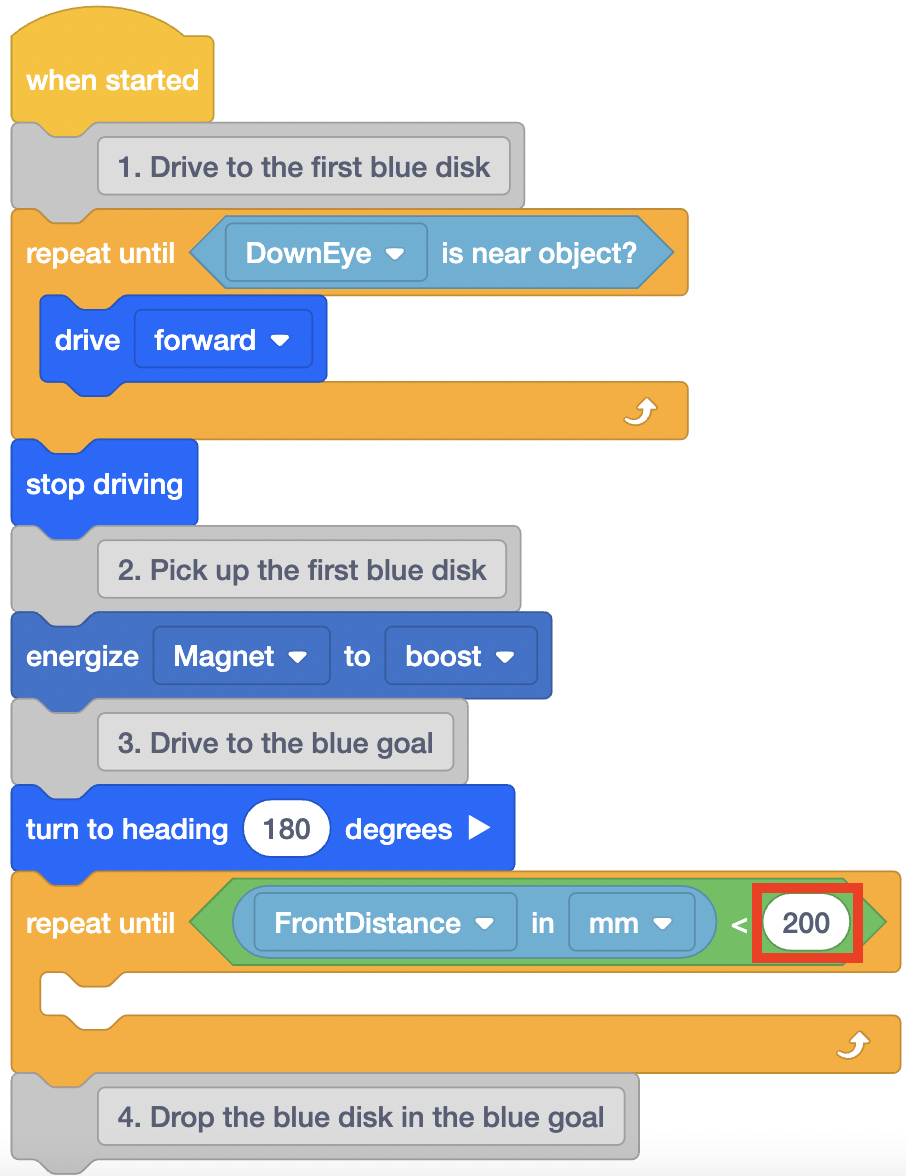
<Less than> ব্লকের প্যারামিটারটি 200 এ পরিবর্তন করুন।
-
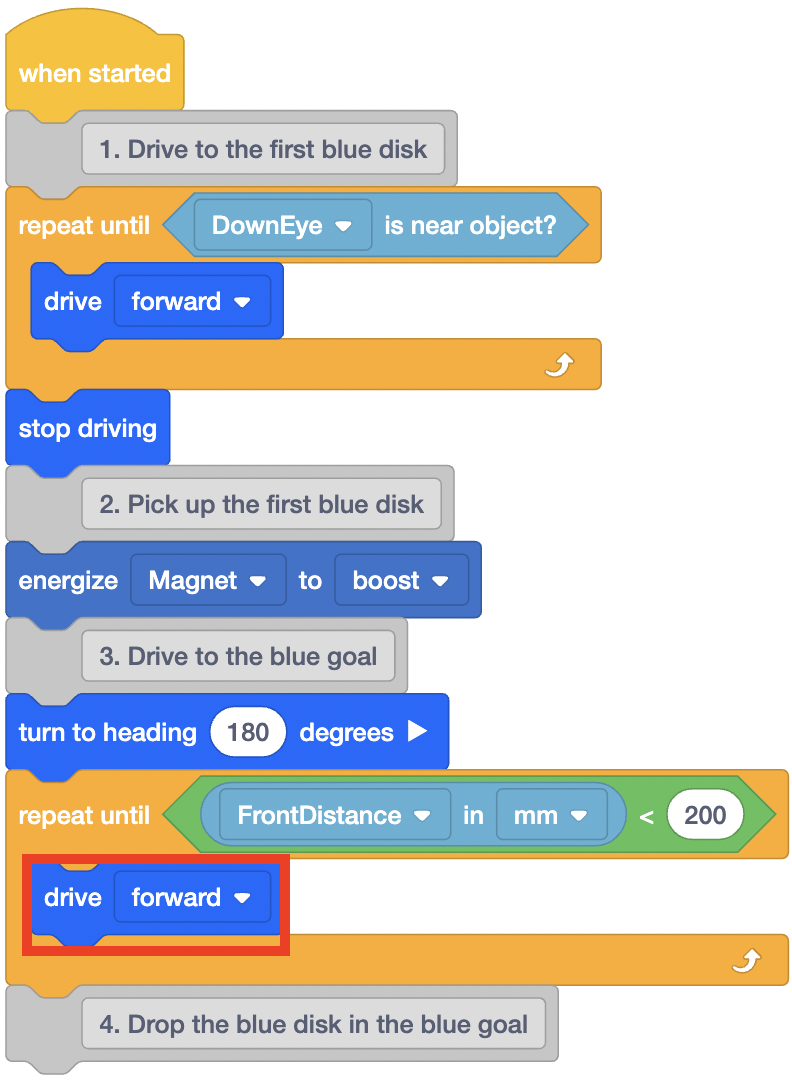
এই ব্লকে একটি [ড্রাইভ] ব্লক যোগ করুন [পর্যন্ত পুনরাবৃত্তি করুন]। দূরত্ব সেন্সর 200 মিলিমিটার (মিমি) এর কম দূরত্বের রিপোর্ট না করা পর্যন্ত এটি VR রোবটকে এগিয়ে যাওয়ার নির্দেশ দেবে।
-
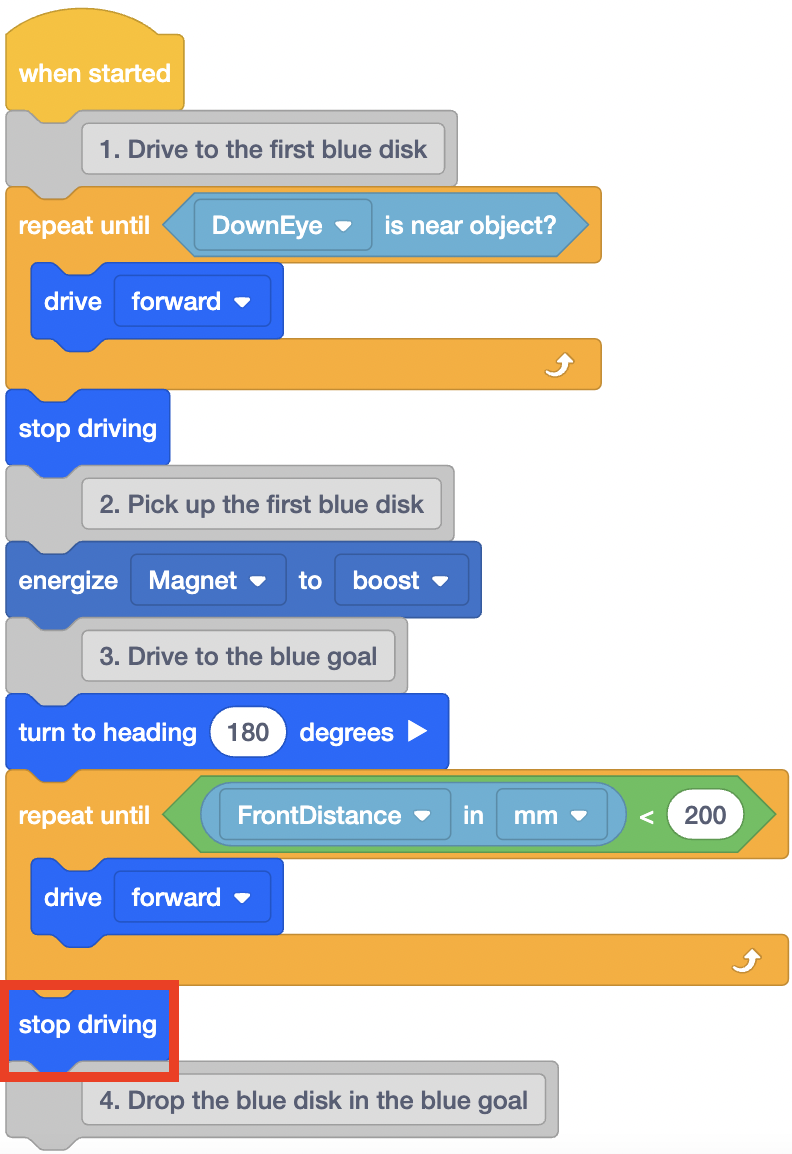
একবার VR রোবট নীল লক্ষ্যে পৌঁছে গেলে (দেয়াল থেকে 200 মিমি), VR রোবটটিকে গাড়ি চালানো বন্ধ করতে হবে। ব্লকের নীচে একটি [ড্রাইভিং বন্ধ করুন] ব্লক যুক্ত করুন [পর্যন্ত পুনরাবৃত্তি করুন]।
-
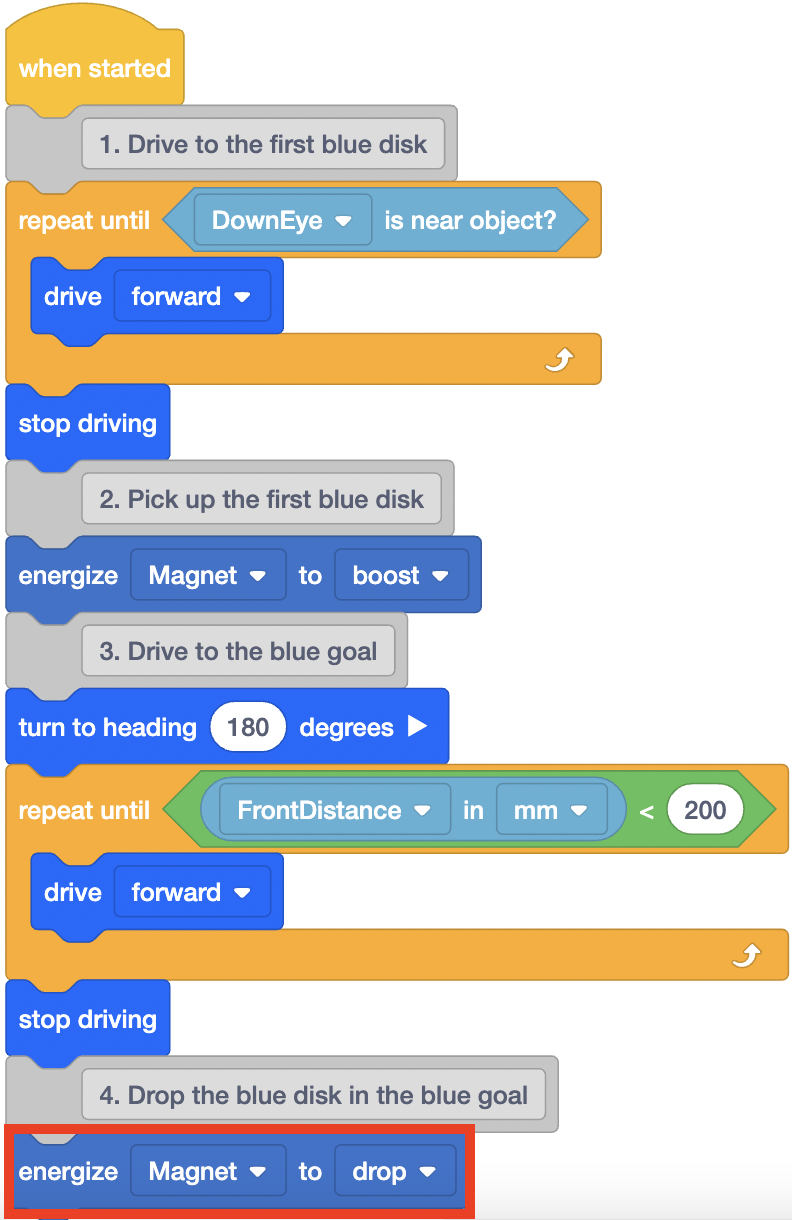
এখন যে ভিআর রোবটটি নীল গোলে বন্ধ হয়ে গেছে, এটি ডিস্কটি ফেলে দিতে পারে। চতুর্থ মন্তব্যের নিচে একটি [এনার্জাইজ ইলেক্ট্রোম্যাগনেট] ব্লক যোগ করুন এবং ব্লকটিকে 'ড্রপ' এ সেট করুন।
-
ভিআর রোবটটিকে কোনো ডিস্কের সাথে ছিটকে যাওয়া বা সংঘর্ষ এড়াতে অল্প দূরত্বের বিপরীতে গাড়ি চালাতে হবে। একটি ডিস্কের সাথে সংঘর্ষের ফলে VR রোবটটি অবশ্যই বন্ধ হয়ে যেতে পারে। VR রোবটকে 100 মিলিমিটার (মিমি) বিপরীতে গাড়ি চালানোর নির্দেশ দিতে নিম্নলিখিত ব্লকগুলি যোগ করুন এবং 0 ডিগ্রির শিরোনামে ফিরে যান।

- ডিস্ক মুভার প্লেগ্রাউন্ড খুলুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
-
VR রোবট এগিয়ে যায়, প্রথম ডিস্কটি তুলে নেয়, তারপর নীল লক্ষ্যের মুখোমুখি হওয়ার জন্য 180 ডিগ্রির শিরোনামে ঘুরে। VR রোবট তারপর দূরত্ব সেন্সর থেকে মান ব্যবহার করে কখন ড্রাইভিং বন্ধ করতে হবে এবং নীল ডিস্কটি ফেলে দেবে তা নির্ধারণ করতে।

- প্রজেক্টের এই অংশে কিভাবে দ্বিতীয়টি [রিপিট না হওয়া পর্যন্ত] ব্লক ফাংশন করে তা লক্ষ্য করুন।
- যখন VR রোবটের দূরত্ব সেন্সর শনাক্ত করে যে খেলার মাঠের প্রাচীরটি 200 মিলিমিটার (মিমি) থেকে কম দূরে, প্রকল্পটি [পর্যন্ত পুনরাবৃত্তি না হওয়া পর্যন্ত] ব্লকের নীচে স্ট্যাকের পরবর্তী ব্লকে চলে যাবে।
- এই প্রকল্পে, এর অর্থ হল VR রোবট গাড়ি চালানো বন্ধ করে এবং ইলেক্ট্রোম্যাগনেটকে নীল গোলে ফেলে দেয়।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।