
Lektion 4: Wandlabyrinth-Herausforderung
In den vorherigen Lektionen in dieser Einheit haben Sie gelernt, wie Sie den Stoßstangensensor verwenden, um zu bestimmten Bereichen des Wandlabyrinth-Spielplatzes zu navigieren. Jetzt werden Sie all diese Konzepte kombinieren, um ein Projekt zu erstellen, das die Wall Maze-Herausforderung von Anfang bis Ende löst!
Lernergebnis
- Wenden Sie Blöcke aus den Kategorien „Antrieb“, „Sensorik“ und „Steuerung“ in der richtigen Reihenfolge an, damit ein VR-Roboter mithilfe des Stoßfängersensors erfolgreich durch das Wandlabyrinth Spielplatz navigiert.
Alles zusammen
Der Block [Warten bis] ist ein Block aus der Steuerungskategorie, der den Projektablauf anhält, bis die gegebene Bedingung WAHR ist. Die Verwendung von Bedingungen und Sensorwerten in einem Projekt weist einen VR-Roboter an, abhängig von den gemeldeten bedingten Werten unterschiedliche Verhaltensweisen auszuführen.

Die Verwendung von Bedingungen und Sensorwerten ermöglicht es dem VR-Roboter, entsprechend auf seine Umgebung zu reagieren, z. B. anzuhalten oder sich zu drehen, wenn der VR-Roboter gegen eine Wand drückt.

Wandlabyrinth-Herausforderung
Erstellen Sie in dieser Herausforderung ein Projekt, bei dem der VR-Roboter mithilfe des Stoßfängersensors von Anfang bis Ende durch den Wandlabyrinth-Spielplatz navigiert.
Befolgen Sie diese Schritte, um die Herausforderung abzuschließen:
-
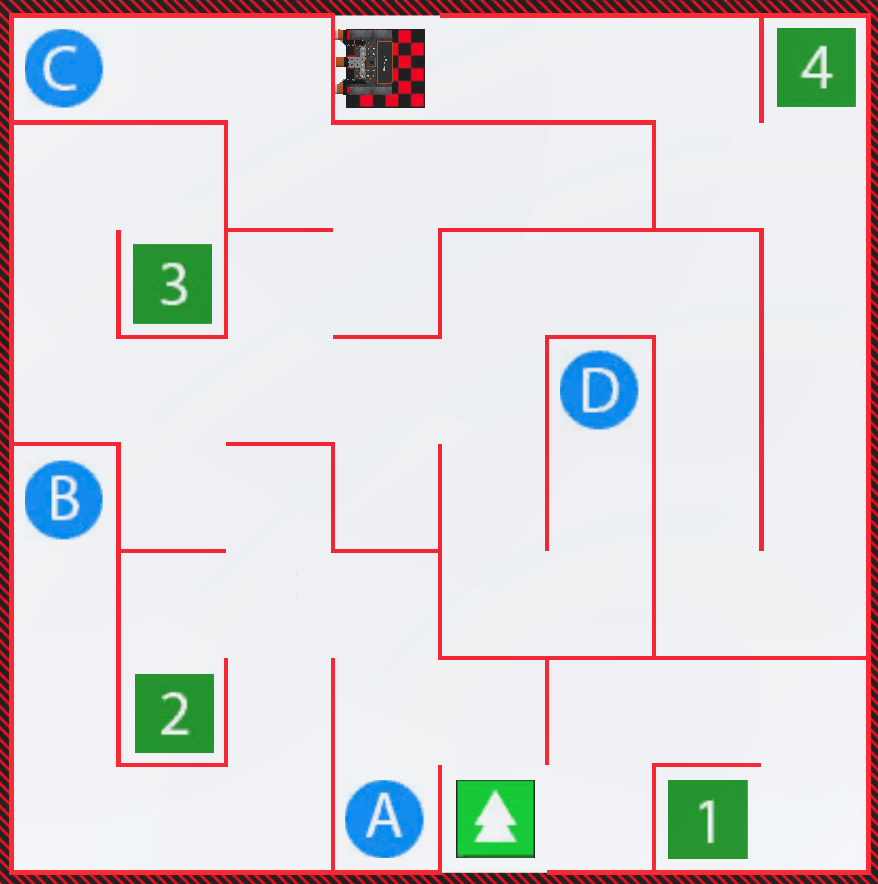
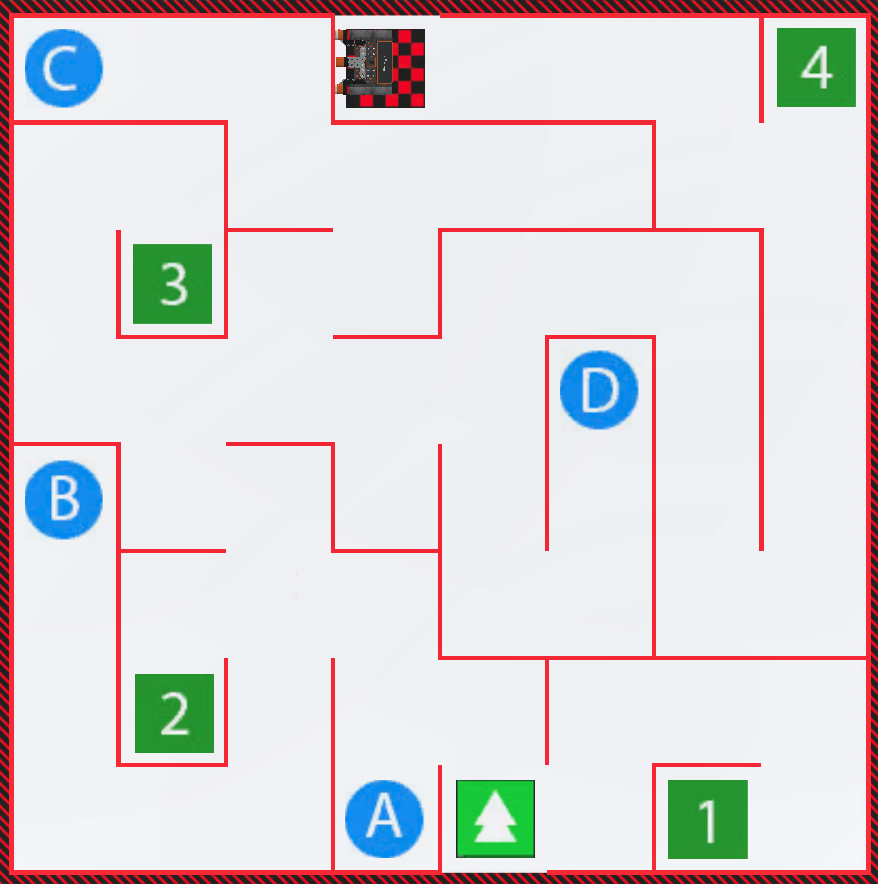
Sehen Sie sich das Lösungsvideo unten an, um zu sehen, wie der VR-Roboter fahren sollte, um die Herausforderung zu meistern. In diesem Videoclip navigiert der VR-Roboter mit dem gleichen Verhaltensmuster durch das gesamte Labyrinth, bis der Stoßstangensensor von einer Wand gedrückt wird und sich dann dreht. Er fängt an zu fahren, wie er es zuvor getan hat, um die Nummer 3 zu erreichen. Wenn der Roboter mit der Nummer 3 hinter der Wand steht, dreht sich der Roboter nach rechts, um auf die rechte Seite des Labyrinths zu gehen. Er fährt vorwärts zu den Wänden, die den Buchstaben D umgeben. Der Roboter navigiert nach links, fährt dann vorwärts und dreht sich nach rechts, um auf dem freien Weg zu bleiben. An der nächsten Wand biegt der Roboter nach links ab und fährt zweimal vorwärts, um dem Weg entlang der linken Wand zu folgen. Der Roboter fährt in die obere rechte Eckwand über die Zahl vier, dann kehrt er um. Schließlich biegt er links ab und fährt zweimal vorwärts, um das Ziel zu erreichen.
- Erstellen Sie ein neues Projekt oder laden Sie ein Projekt aus vorherigen Lektionen in dieser Lektion. Wenn Sie ein neues Projekt erstellen, wählen Sie den Wall Maze Playground aus, wenn Sie dazu aufgefordert werden. Denken Sie daran, dass Sie , wenn Sie ein VEXcode VR Premium-Konto haben, eine Kombination aus VEXcode-Blöcken und Switch-Blöcken verwenden können.
- Umbenennen des Projekts Unit4Challenge
- Öffne das Spielplatz-Fenster.
- Lade den Wandlabyrinth-Spielplatz .
- Fügen Sie die Blöcke hinzu, die erforderlich sind, um den VR-Roboter vom Anfang bis zum Ende des Wandlabyrinths zu navigieren.
- Starten Sie das Projekt, um zu testen, ob es funktioniert.
- Wenn das Projekt nicht erfolgreich ist, bearbeiten Sie es und versuchen Sie es erneut. Fahren Sie fort, das Projekt zu überarbeiten und auszuführen, bis der VR-Roboter erfolgreich von Anfang bis Ende fährt.
- Speichern Sie das Projekt, sobald der VR-Roboter erfolgreich zum Ziel gefahren ist.
Herzlichen Glückwunsch! Du hast die Wandlabyrinth-Herausforderung erfolgreich abgeschlossen!
Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf