
Burgzerstörer
6 Unterricht
In dieser Einheit erkunden Sie, wie Sie die optischen Sensoren und Distanzsensoren nutzen können, um Buckyball-„Burgen“ zu suchen, zu zerstören und zu räumen und so im Castle Crasher-Wettbewerb Punkte zu erzielen!
Besuchen Sie das Lehrerportal für Lehrerunterstützungsmaterialien und Videos zum Inhalt und zur Durchführung der Castle Crasher-Lektionen.
Lektion 1: Einführung
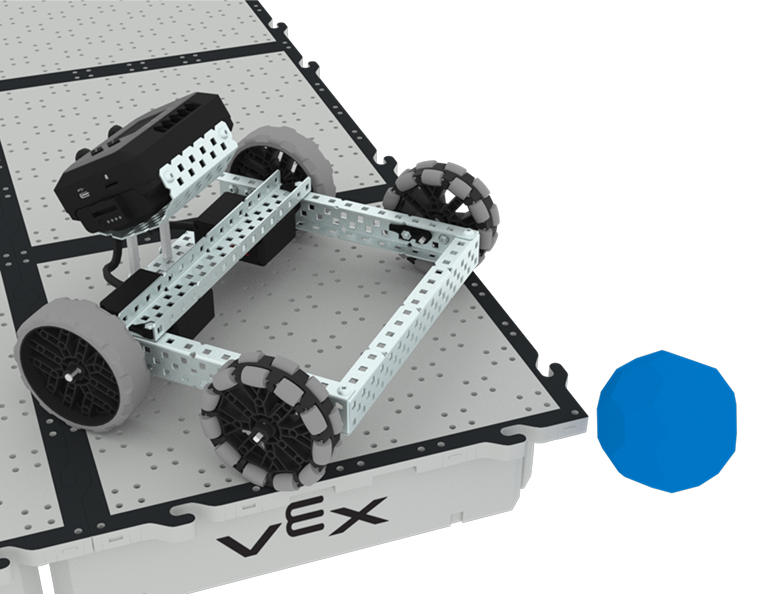
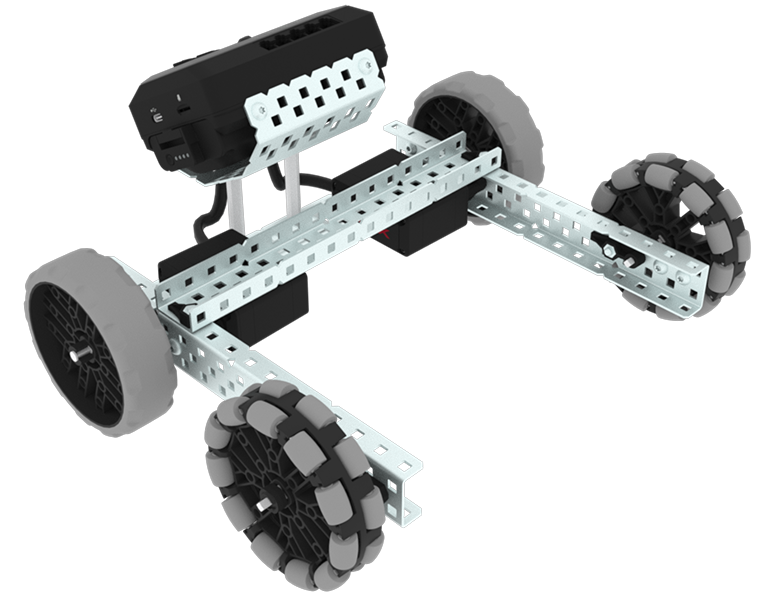
In dieser Lektion lernen Sie den Castle Crasher-Wettbewerb kennen, bauen den BaseBot und bereiten sich auf den Code vor.
Lektion 2: Castle Crasher Keine Sensoren
In dieser Lektion lernen Sie, wie Sie Winkel berechnen und die Geschwindigkeit Ihres Roboters ändern, damit Sie an der Buckyball Blitz Challenge teilnehmen können.
Lektion 3: Castle Crasher + Abstandssensor
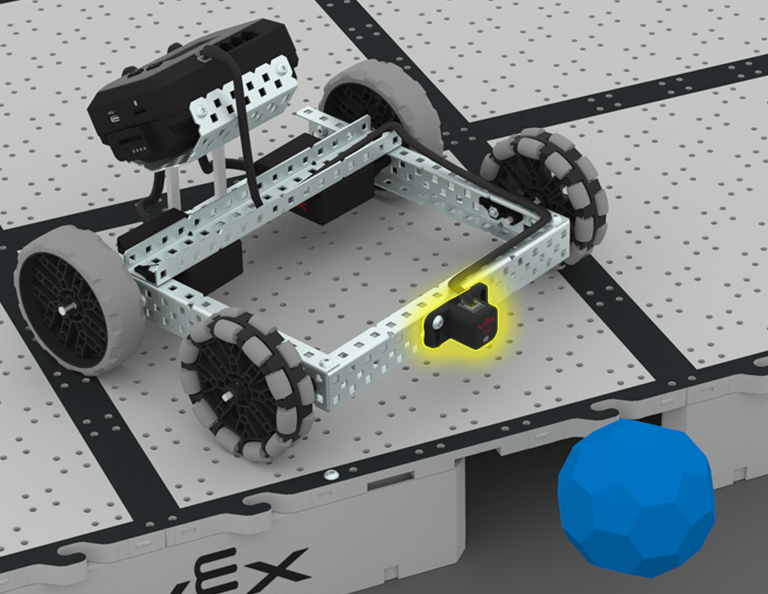
In dieser Lektion erfahren Sie, was der Abstandssensor ist und wie er an Ihrem Roboter verwendet werden kann. Sie erfahren auch mehr über den Block [Warten bis] und wie er in einem VEXcode EXP-Projekt verwendet werden kann. Dann wendest du an, was du gelernt hast, um in der Sense and Sweep Challenge anzutreten!
Lektion 4: Erstellen von Algorithmen
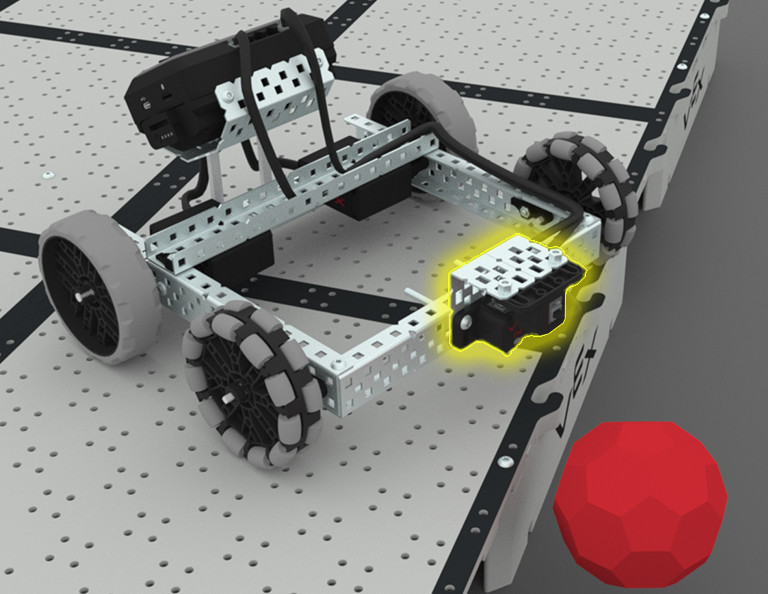
In dieser Lektion erfahren Sie mehr über den optischen Sensor und darüber, wie Sie einen Algorithmus erstellen, der Sensorfeedback verwendet. Dann wirst du deinen Roboter so programmieren, dass er selbstständig Buckyballs findet und sie in der Sweep the Field Challenge vom Feld schiebt.
Lektion 5: Castle-Crasher-Wettbewerb
In dieser Lektion wendest du deine Erkenntnisse aus den vorherigen Lektionen an, um an einem Castle Crasher-Wettbewerb teilzunehmen!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.