
Einleitung
In dieser Lektion erfahren Sie mehr über den optischen Sensor und wie Sie Sensor-Feedback verwenden können, um Ihre Strategie und Ihren Code für das Spielen von Castle Crasher zu optimieren. Sie werden auch lernen, wie Sie einen Algorithmus erstellen, um Ihren Roboter zu codieren, um selbstständig Buckyballs zu finden und die Sweep the Field-Herausforderung zu meistern. Sehen Sie sich die Animation unten an, um ein Beispiel dafür zu sehen, wie sich der Roboter bewegen kann, um Buckyballs vom Feld zu erkennen und zu entfernen, ohne von der Kante zu fallen.
Optischer Sensor hinzufügen
In dieser Lektion lernen Sie den optischen Sensor kennen und erfahren, wie Sie ihn mit dem Abstandssensor verwenden können, um einen Algorithmus zu erstellen.
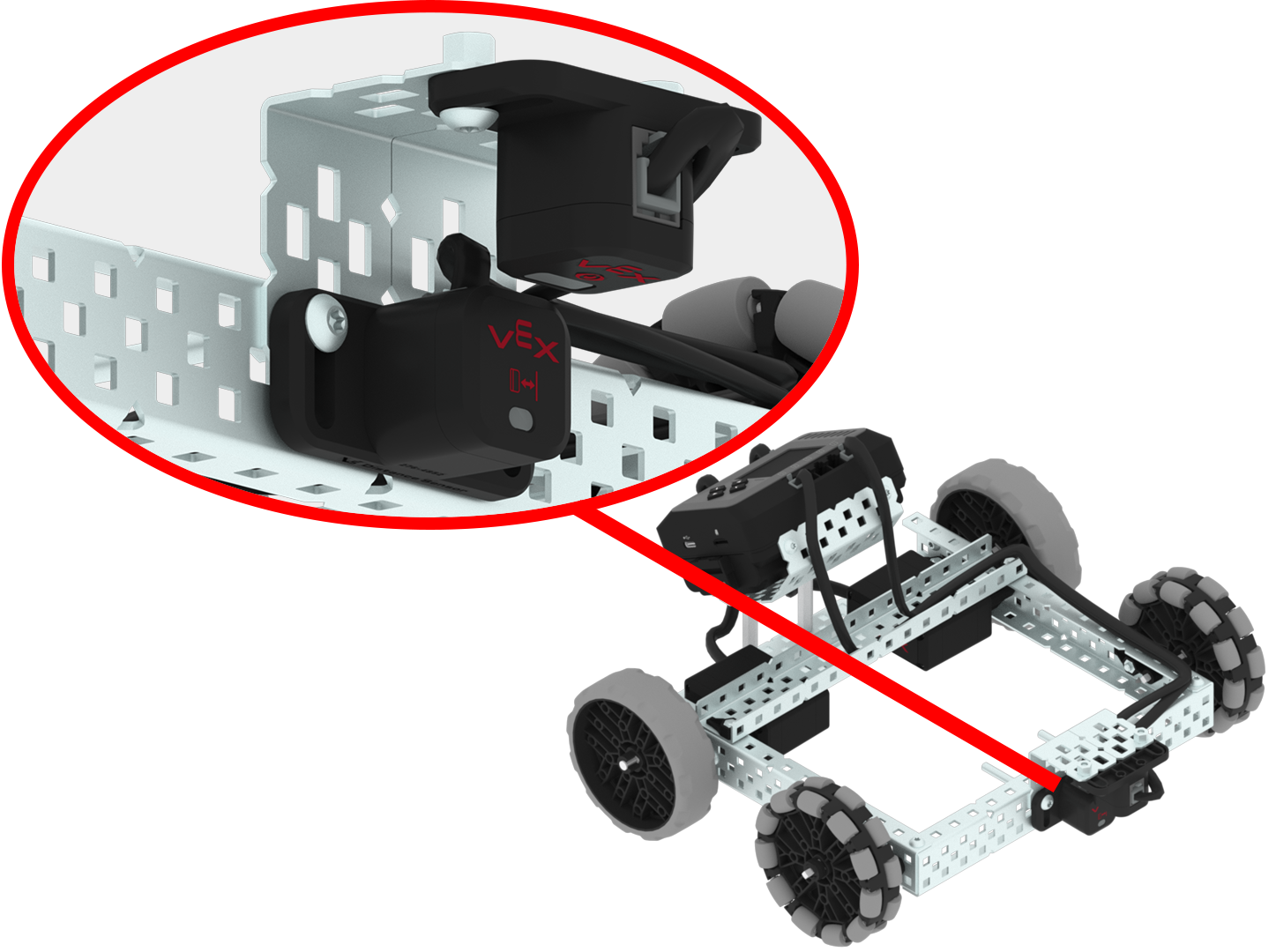
Fügen Sie die optischen Sensoren und Abstandssensoren zu Ihrem BaseBot hinzu, wie in dieser Abbildung gezeigt.
- Fügen Sie einen 1x2x1x16 C-Kanal an der Vorderseite des BaseBot wie abgebildet hinzu.
- Montieren Sie dann den Abstandssensor mit dem C-Kanal nach außen, wie in der Abbildung gezeigt.
- Fügen Sie den optischen Sensor nach unten hinzu.
- Der Abstandssensor sollte an Port 5 und der optische Sensor an Port 1 angeschlossen werden.
Wählen Sie < Zurück zu Lektionen, um zur Lektionsübersicht zurückzukehren.
Wählen Sie Weiter > , um mehr über den optischen Sensor zu erfahren und zu erfahren, wie Sie Sensorfeedback und Algorithmen verwenden können, um Ihren Roboter zu codieren, um Buckyballs aus einem Feld zu finden und zu schieben.