
Lektion 3: Verwenden des gemeldeten Sensor-Feedbacks zum Aufnehmen von Festplatten
In dieser Lektion wird das gemeldete Sensorfeedback verwendet, um die gleiche Herausforderung wie in Lektion 2 zu lösen. Der VR-Roboter hebt die erste blaue Scheibe auf und bewegt sie in das blaue Tor.
-
Starten Sie ein neues Projekt in VEXcode VR und benennen Sie das Projekt Unit8Lesson3.

-
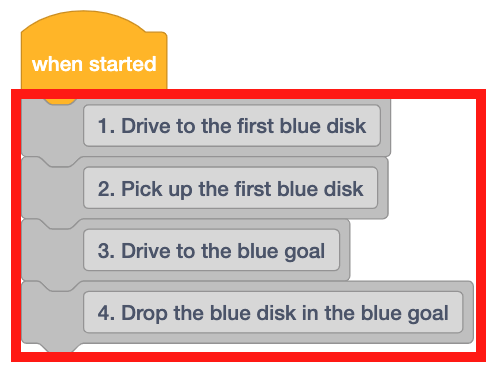
Ziehen Sie vier Kommentarblöcke in den Arbeitsbereich. Fügen Sie Kommentare zu jedem der Schritte hinzu, die erforderlich sind, damit der VR-Roboter auf die erste Festplatte fährt, diese aufnimmt und zum blauen Ziel zurückkehrt.
-
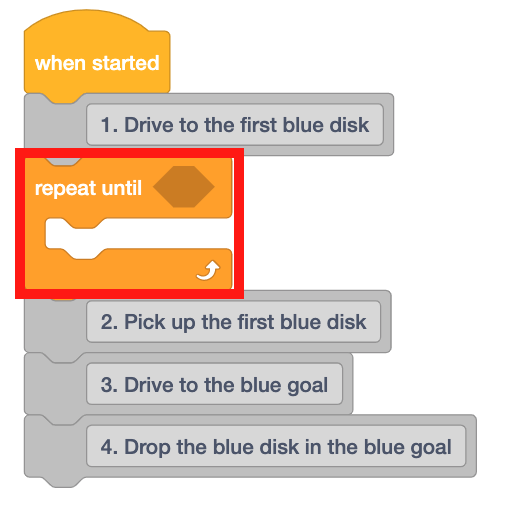
Ziehen Sie einen [Wiederholen bis] -Block in den Arbeitsbereich unter dem ersten Kommentar.
Zur Kenntnisnahme
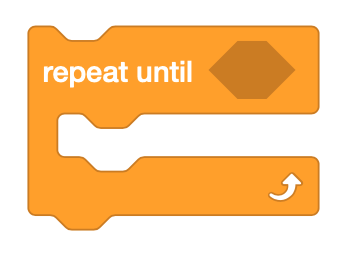
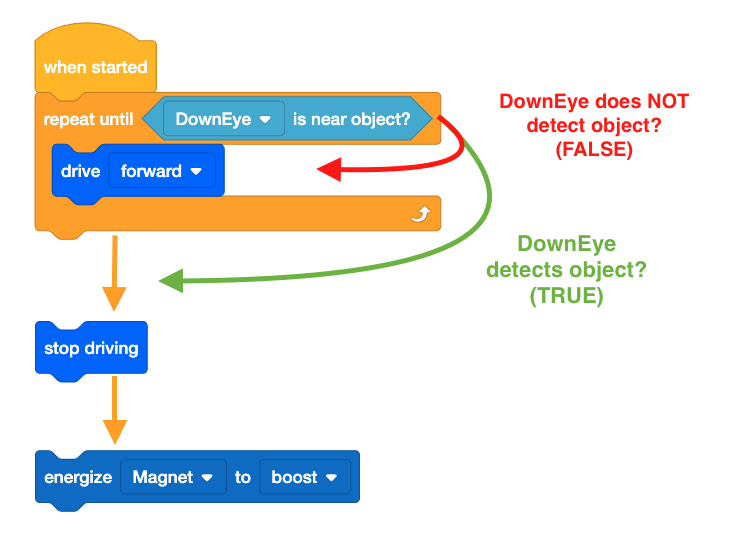
Der Block [Wiederholen bis] ist ein C-Block, der Boolesche Reporterblöcke akzeptiert. Der Block [Wiederholen bis] überprüft nur die boolesche Bedingung zu Beginn jeder Schleife. Wenn die boolesche Bedingung als FALSCH gemeldet wird, werden die darin enthaltenen Blöcke ausgeführt. Wenn die boolesche Bedingung als WAHR gemeldet wird, werden die darin enthaltenen Blöcke übersprungen.
-
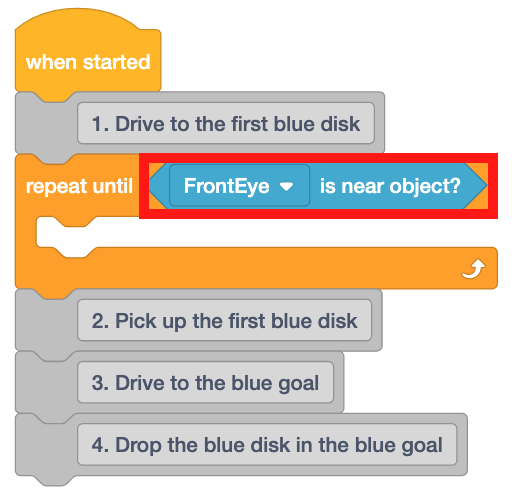
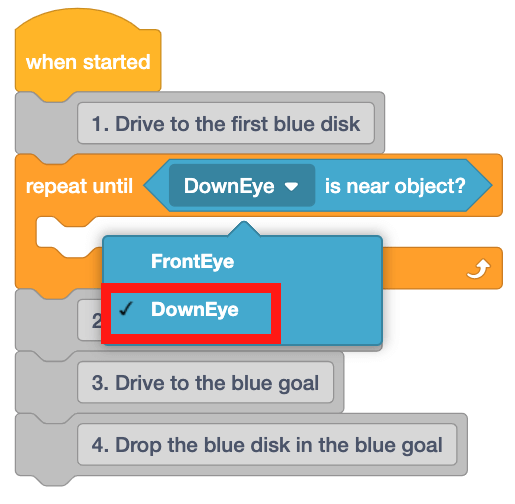
Der <Eye Sensor near object> Block meldet TRUE, wenn der VR-Roboter eine farbige Festplatte auf dem Disk Mover Playground erkennt. Ziehen Sie diesen Block in das Projekt.
-
Die Festplatten auf dem Disk Mover Playground befinden sich auf dem Boden des Playgrounds und können vom Front Eye Sensor nicht erkannt werden. Setzen Sie aus diesem Grund den <Eye Sensor near object> Block auf „DownEye“.
-
Die Blöcke auf der Innenseite des Blocks [Wiederholen bis] werden ausgeführt, wenn der VR-Roboter KEIN Objekt erkennt. Um eine der Festplatten zu erreichen, muss der VR-Roboter vorwärts fahren, bis die Festplatte erkannt wird.

-
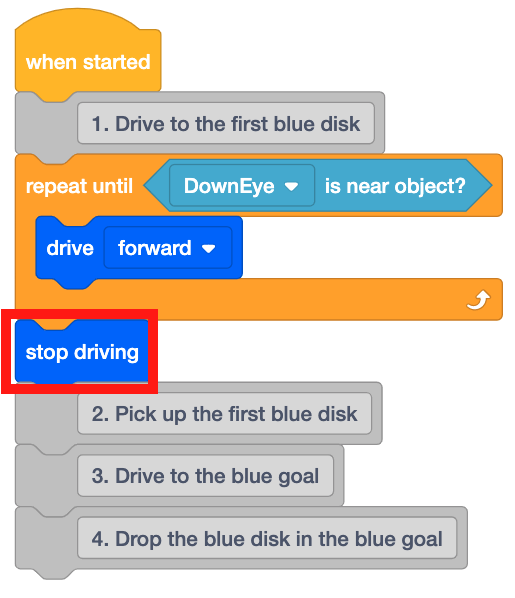
Ziehen Sie einen [Drive] -Block in den [Repeat until] -Block.

-
Wenn eine Festplatte erkannt wird, muss der VR-Roboter aufhören zu fahren, um sie aufzunehmen. Ziehen Sie einen [Stop driving] -Block und platzieren Sie ihn unter dem [Repeat until] -Block.
-
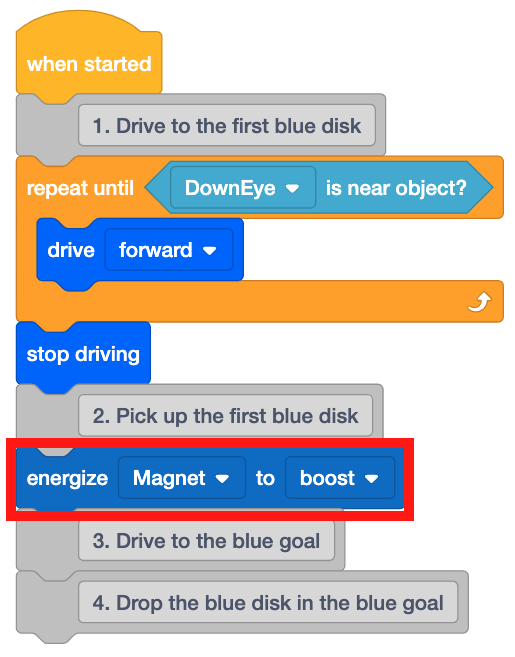
Weisen Sie nun den VR-Roboter an, die Festplatte mit dem Elektromagneten aufzunehmen, indem Sie einen [Elektromagneten aktivieren] -Block unter dem zweiten Kommentar platzieren.
- Öffnen Sie den Disk Mover Playground , wenn er noch nicht geöffnet ist, und führen Sie das Projekt aus.
-
Der VR-Roboter fährt vorwärts, bis die erste blaue Platte vom Down Eye Sensor erkannt wird, stoppt die Fahrt und aktiviert den Elektromagneten, um die Platte aufzunehmen.

- Beachten Sie, wie der Block [Wiederholen bis] in diesem Projekt funktioniert.
- Sobald der Down Eye Sensor am VR-Roboter ein Objekt erkennt, wechselt das Projekt zum nächsten Block im Stapel unter dem Block [Wiederholen bis].
- In diesem Projekt bedeutete dies, dass der VR-Roboter das Fahren einstellte und den Elektromagneten mit Strom versorgte.
Verwenden von Schalterblöcken
Das folgende Bild zeigt die Workflow-Grafik dieser Lektion mithilfe von Switch-Blöcken. Ein Vergleich dieser Grafik mit der obigen Grafik kann Ihnen helfen, den Workflow der neuen Switch Python-Befehle, die Sie lernen, besser zu verstehen.
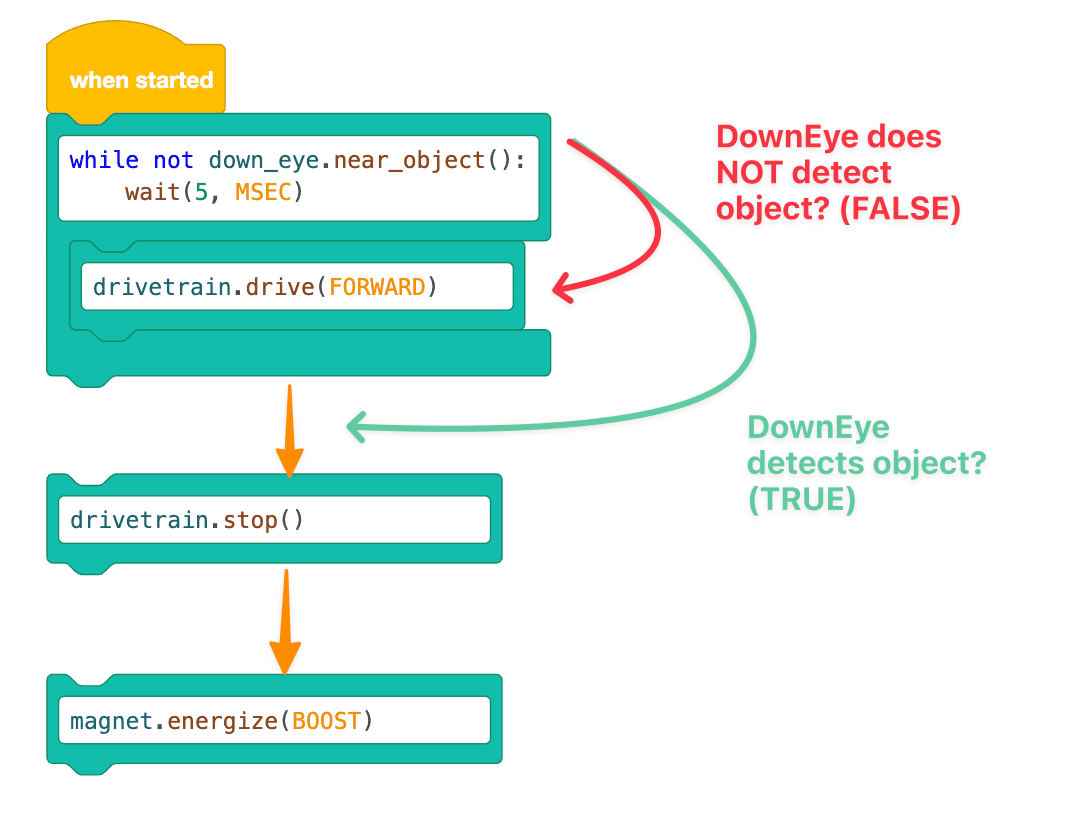
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.