
![]() Lehrer-Toolbox
–
Aktivitätsübersicht
Lehrer-Toolbox
–
Aktivitätsübersicht
-
Diese Erkundung führt die Schüler in die grundlegenden Programmierverhaltensweisen beim Rechts- und Linksabbiegen und beim Warten ein.
-
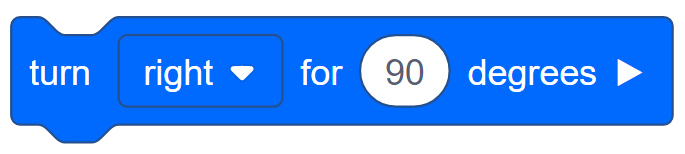
Durch die Verwendung der Antriebsstrang-Roboterkonfiguration können die Schüler den Speedbot so programmieren, dass er sich dreht, indem sie einfach den Block [Drehen für] auswählen.
Speedbot ist bereit zum Drehen!
Diese Erkundung gibt Ihnen die Werkzeuge an die Hand, mit denen Sie einige coole Projekte erstellen können, denen Ihr Speedbot folgen kann.
-
VEXcode V5 , der in dieser Erkundung verwendet wird:
-
Um weitere Informationen über den Block zu erhalten, öffnen Sie die Hilfe und wählen Sie dann den Block [Abbiegen nach] aus.

-
Stellen Sie sicher, dass Sie die erforderliche Hardware, Ihr Engineering-Notebook und VEXcode V5 heruntergeladen und bereit haben.
![]() Tipps für Lehrer
Tipps für Lehrer
Wenn der Schüler VEXcode V5 zum ersten Mal verwendet, kann er während dieser Erkundung jederzeit auf die Tutorials zurückgreifen. Die Tutorials befinden sich in der Symbolleiste.

| Menge | Benötigte Materialien |
|---|---|
| 1 |
Speedbot-Roboter |
| 1 |
Geladener Roboterakku |
| 1 |
VEXcode V5 |
| 1 |
USB-Kabel (bei Verwendung eines Computers) |
| 1 |
Technisches Notizbuch |
![]() Tipps für Lehrer
Tipps für Lehrer
-
Modellieren Sie jeden Schritt, um zu überprüfen, ob der Speedbot bereit ist, damit sich die Schüler daran gewöhnen.
Schritt 1: Vorbereitung auf die Erkundung
Halten Sie alle diese Gegenstände bereit, bevor Sie mit der Aktivität beginnen? Überprüfen Sie Folgendes:
-
Sind die Smart-Kabel vollständig eingesteckt in alle Motoren?
-
Ist das Gehirn eingeschaltet?
-
Ist die Batterie geladen?
Schritt 2: Starten Sie ein neues Projekt
Bevor Sie mit Ihrem Projekt beginnen, wählen Sie das Vorlageprojekt Speedbot (Antriebsstrang 2 Motoren, kein Gyro) aus. Das Vorlagenprojekt enthält die Motorkonfiguration des Speedbot. Wenn die Vorlage nicht verwendet wird, führt Ihr Roboter das Projekt nicht korrekt aus.

Führen Sie die folgenden Schritte aus, um das Vorlagenprojekt zu öffnen:
-
Öffnen Sie das Menü Datei.
-
Wählen Sie Beispiele öffnen.
-
Wählen und öffnen Sie die Speedbot-Vorlage (Antrieb mit 2 Motoren, kein Gyro) Projekt.
-
Da wir den Block [Turn for] verwenden werden, benennen Sie Ihr Projekt in Turn um.
-
Speichern Sie Ihr Projekt.
-
Stellen Sie sicher, dass der Projektname Turn jetzt im Fenster in der Mitte der Symbolleiste angezeigt wird.

![]() Lehrer-Toolbox
-
Projekte speichern
Lehrer-Toolbox
-
Projekte speichern

Weisen Sie darauf hin, dass beim ersten Öffnen von VEXcode V5 das Fenster mit der Bezeichnung VEXcode-Projekt versehen war und nicht gespeichert wurde (angezeigt in der Symbolleiste). VEXcode-Projekt ist der Standardprojektname, wenn VEXcode V5 zum ersten Mal geöffnet wird. Sobald das Projekt in „Turn“ umbenannt und gespeichert wird, wird die Anzeige auf „Gespeichert“ aktualisiert. Anhand dieses Fensters in der Symbolleiste kann leicht überprüft werden, ob die Schüler das richtige Projekt verwenden und es gespeichert ist. Sobald ein Projekt zum ersten Mal gespeichert wird, speichert VEXcode V5 alle nachfolgenden Änderungen automatisch, wie durch die Meldung neben dem Projektnamen angezeigt.
Sagen Sie den Schülern, dass sie nun bereit sind, mit ihrem ersten Projekt zu beginnen. Erklären Sie den Schülern, dass sie mit ein paar einfachen Schritten ein Projekt erstellen und ausführen können, das den Speedbot verwandelt.
![]() Tipps für Lehrer
Tipps für Lehrer
-
Da es sich hierbei um eine Einstiegsaktivität in die Programmierung handelt, sollte der Lehrer die Schritte modellieren und die Schüler dann auffordern, dieselben Aktionen auszuführen. Der Lehrer sollte dann die Schüler überwachen, um sicherzustellen, dass sie die Schritte korrekt befolgen.
-
Stellen Sie sicher, dass die Schüler im Menü „Datei“ die Option „Beispiele“ öffnen ausgewählt haben.
-
Stellen Sie sicher, dass die Schüler das Vorlagenprojekt „Speedbot“ (Antriebsstrang mit 2 Motoren, kein Kreisel) ausgewählt haben.
Sie können die Studierenden darauf hinweisen, dass auf der Seite „Beispiele“ mehrere Auswahlmöglichkeiten zur Auswahl stehen. Wenn sie andere Roboter bauen und verwenden, haben sie die Möglichkeit, unterschiedliche Vorlagen zu verwenden.
-
Sie können die Schüler bitten, ihre Initialen oder den Namen ihrer Gruppe zum Projektnamen hinzuzufügen. Dies hilft, die Projekte zu differenzieren, wenn Sie die Studierenden bitten, sie einzureichen.
Schritt 3: Biegen Sie rechts ab
-
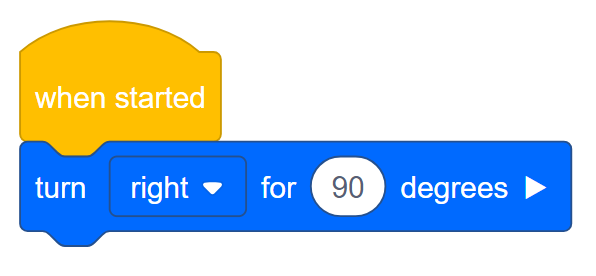
Fügen Sie den Block [Turn for] zum Block {When started} im Programmierbereich hinzu.

-
Klicken Sie auf den Slot -Symbol. Sie können Ihr Projekt auf einen der vier verfügbaren Slots im Robot Brain herunterladen. Klicken Sie auf die Zahl 1.

-
Verbinden Sie den Roboter mit Ihrem Computer oder Tablet. Das Brain-Symbol in der Symbolleiste wird grün, sobald eine erfolgreiche Verbindung hergestellt wurde.

-
Klicken Sie in der Symbolleiste auf die Schaltfläche Herunterladen, um das Turn-Projekt in das Robot Brain herunterzuladen.
![]() Lehrer-Toolbox
-
Hilfe zu Blöcken
Lehrer-Toolbox
-
Hilfe zu Blöcken
-
Weisen Sie darauf hin, dass sich im Programmierbereich standardmäßig bereits ein {When started} -Block befindet. Jedes Projekt beginnt mit diesem Block. Beim Start des Projekts werden die verbundenen Blöcke in der Reihenfolge ihrer Platzierung eingehalten.
Demonstrieren Sie, wie Sie auf den Block [Drehen für] klicken und ihn in den Programmierbereich ziehen, um ihn mit dem Block {When started} zu verbinden. Beim Anbringen hören Sie ein Klicken.
-
Wenn Sie einen Computer verwenden, sollte der Schüler VEX V5 Robot Brain über ein USB-Kabel mit dem Computer verbunden haben. Wenn Sie ein Tablet verwenden, sollte das VEX V5 Robot Brain über das Smart Radio mit dem Tablet verbunden sein.
-
Wenn die Schüler einen Computer verwenden, bitten Sie sie jetzt, das USB-Kabel vom Robot Brain zu trennen. Wenn der Roboter während der Ausführung eines Projekts an einen Computer angeschlossen ist, kann es dazu führen, dass der Roboter am Verbindungskabel zieht.
![]() Lehrer-Toolbox
-
Halten Sie inne und diskutieren Sie
Lehrer-Toolbox
-
Halten Sie inne und diskutieren Sie
Dies ist ein guter Zeitpunkt, um innezuhalten und den Schüler über die Durchführung seines ersten Projekts nachdenken zu lassen. Als Studierende:
-
Was hat Speedbot gemacht, als Sie das Projekt durchgeführt haben?
-
Hat es sich so verhalten, wie Sie es aufgrund des Projekts erwarten würden?
Nehmen Sie sich einen Moment Zeit, um sicherzustellen, dass alle Schüler diesen Schritt ohne Probleme abgeschlossen haben, bevor Sie fortfahren.

-
Überprüfen Sie, ob Ihr Projekt in das Gehirn des Speedbot heruntergeladen wurde, indem Sie auf den Bildschirm des Roboterhirns schauen. Der Projektname sollte in Slot 1aufgeführt sein.
![]() Lehrer-Toolbox
–
Model First
Lehrer-Toolbox
–
Model First
Führen Sie das Projekt vor der Klasse vor, bevor alle Schüler es gleichzeitig versuchen. Versammeln Sie die Schüler in einem Bereich und lassen Sie genügend Platz, damit sich der Speedbot bewegen kann, wenn er auf den Boden gestellt wird. Da der Speedbot das Projekt so lange ausführt, bis die Zurück-Taste am Robotergehirn gedrückt wird, möchte der Lehrer möglicherweise jemanden auswählen, der ihm dabei hilft, das Projekt des Speedbots zu stoppen, wenn es abgeschlossen ist.
Sagen Sie den Schülern, dass sie nun an der Reihe sind, ihr Projekt durchzuführen. Stellen Sie sicher, dass sie einen freien Weg haben und dass keine Speedbots aufeinander stoßen.
-
Führen Sie das Projekt auf dem Speedbot-Roboter aus, indem Sie sicherstellen, dass das Projekt ausgewählt ist, und dann auf die Schaltfläche „Ausführen“ klicken.
Schritt 4: Biegen Sie links ab

-
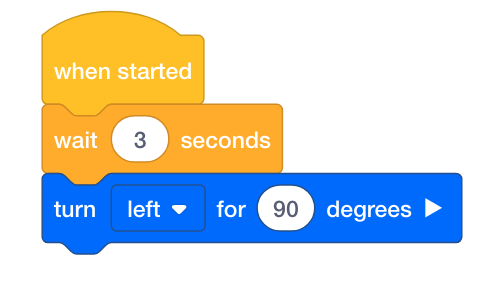
Ändern Sie [Abbiegen nach] so, dass links statt rechts angezeigt wird.
-
Laden Sie das Projekt herunter.
-
Führen Sie das Projekt auf dem Speedbot-Roboter aus, indem Sie sicherstellen, dass Wählen Sie das Projekt aus und klicken Sie dann auf die Schaltfläche „Ausführen“.
![]() Lehrer-Toolbox
-
Abschluss von Schritt 4
Lehrer-Toolbox
-
Abschluss von Schritt 4
-
Um den Block [Abbiegen] von rechts nach links zu ändern, klicken Sie einfach auf das Dropdown-Menü und wählen Sie links aus.
-
Wenn die Schüler einen Computer verwenden, erinnern Sie sie daran, das USB-Kabel von Robot Brain zu trennen, bevor Sie das Projekt ausführen.
Da wir keinen neuen Slot auswählen, wird das neue Projekt auf Slot 1 heruntergeladen und ersetzt das vorherige Projekt.
-
Da VEXcode V5 über eine automatische Speicherung verfügt, ist es nicht erforderlich, das Projekt erneut zu speichern.
Schritt 5: Warten Sie, dann biegen Sie links ab
-
Fügen Sie einen Block [Wait] vor dem Block [Turn for] hinzu. Dadurch wird der Roboter angewiesen, zu warten, bevor er nach links abbiegt.
-
Fügen Sie drei Sekunden in den Block [Warten] ein. Dadurch wird der Roboter angewiesen, drei Minuten zu warten, bevor er umdreht.
-
Laden Sie das Projekt herunter.
-
Führen Sie das Projekt auf dem Speedbot-Roboter aus, indem Sie sicherstellen, dass Wählen Sie das Projekt aus und klicken Sie dann auf die Schaltfläche „Ausführen“.
![]() Lehrer-Toolbox
-
Abschluss von Schritt 5
Lehrer-Toolbox
-
Abschluss von Schritt 5
-
Ein [Warten] -Block kann an einer beliebigen Stelle im Projekt platziert werden. Für weitere Informationen zum Block [Warten] öffnen Sie den Block Hilfe.
-
Durch die Verwendung eines [Warten] -Blocks wird das Projekt nicht beendet.
-
Wenn die Schüler einen Computer verwenden, erinnern Sie sie daran, das USB-Kabel von Robot Brain zu trennen, bevor Sie das Projekt ausführen.
-
Da VEXcode V5 über eine automatische Speicherung verfügt, ist es nicht erforderlich, das Projekt erneut zu speichern.
![]() Motivieren Sie die Diskussion
-
Die Blockaden verstehen
Motivieren Sie die Diskussion
-
Die Blockaden verstehen
F: Anzeigen der aktuellen Position des Roboters bei null Grad, Wenn sich der Roboter um 90 Grad nach links drehen würde, dann um 120 Grad nach rechts und schließlich um 40 Grad nach links drehen würde, wie viele Grad würde sich der Roboter nach Abschluss der Drehung derzeit befinden?
A: Der Roboter hat eine Neigung von 10 Grad. Nachdem er sich um 90 Grad nach links gedreht hatte, drehte sich der Roboter um 120 Grad nach rechts. Betrachtet man das Drehen nach links als eine Bewegung in eine positive Richtung und das Drehen nach rechts als eine Subtraktion oder Bewegung in eine negative Richtung – ähnlich wie bei einer x-y-Koordinatenebene, wird der Roboter jetzt auf -30 Grad gesetzt. Da 90-120 = -30. Ab -30 Grad dreht sich der Roboter um 40 Grad nach links. Somit ist -30 + 40 = 10. Der Roboter endet bei 10 Grad.
F: Anzeigen der aktuellen Position des Roboters bei null Grad, Wenn Sie den Roboter um 30 Grad nach rechts drehen, endet der Roboter an derselben Stelle, als würden Sie bei null Grad beginnen und den Roboter um 330 Grad nach links drehen. Wenn sich der Roboter um 56 Grad nach rechts dreht und um wie viele Grad nach links muss sich der Roboter drehen, um an derselben Stelle zu landen, vorausgesetzt, er startet bei null Grad?
A: Da die vollständige Drehung des Roboters 360 Grad beträgt, können Sie 360 Grad addieren und subtrahieren, um zu berechnen, wie sich der Roboter drehen muss. 360 - 56 = 304. Daher muss sich der Roboter um 304 Grad nach links drehen, um an der gleichen Stelle zu enden wie bei einer Drehung um 56 Grad nach rechts.
Schritt 6: Schließen Sie die Überwachungskamera-Herausforderung ab!

 Bei der Security Camera Challenge muss sich der Roboter zunächst um 90 Grad nach rechts drehen. Der Roboter dreht sich dann um 180 Grad nach links und dann um 180 Grad nach rechts und „scannt“ genau wie eine Überwachungskamera. Anschließend wiederholt der Roboter noch zwei weitere Male die Drehung um 180 Grad nach links und um 180 Grad nach rechts. Somit scannt der Roboter insgesamt dreimal 180 Grad.
Bei der Security Camera Challenge muss sich der Roboter zunächst um 90 Grad nach rechts drehen. Der Roboter dreht sich dann um 180 Grad nach links und dann um 180 Grad nach rechts und „scannt“ genau wie eine Überwachungskamera. Anschließend wiederholt der Roboter noch zwei weitere Male die Drehung um 180 Grad nach links und um 180 Grad nach rechts. Somit scannt der Roboter insgesamt dreimal 180 Grad.
Bevor Sie den Roboter programmieren, planen Sie den Weg und das Verhalten des Roboters in Ihrem technischen Notizbuch.
Nach Abschluss der Überwachungskamera-Herausforderung können Sie Vorwärts- und Rückwärtsbewegungen mit zusätzlichen Roboterverhalten kombinieren, um noch anspruchsvollere Herausforderungen zu meistern.
![]() Lehrer-Toolbox
–
Lösungen
Lehrer-Toolbox
–
Lösungen
- Sehen Sie sich die Beispiellösung unten an.
- Eine Programmierrubrik zur Bewertung von Schülern finden Sie hier (Google / .docx / .pdf).

Für eine fortgeschrittenere Lösung kann ein Schüler auch mit dem Block [Repeat] in Schleifen eingeführt werden. Weitere Informationen zum Block [Repeat] finden Sie in Hilfe.

![]() Tipps für Lehrer
Tipps für Lehrer
Überprüfen Sie, ob der Roboter die Herausforderung erfolgreich abgeschlossen hat, indem Sie die Startposition des Roboters beobachten und zählen, um sicherzustellen, dass der Roboter die richtigen Aktionen ausgeführt hat. Der Roboter sollte sich um 90 Grad nach rechts drehen und dies dann dreimal wiederholen: eine Drehung um 180 Grad nach links und eine Drehung um 180 Grad nach rechts.