
दाएं और बाएं मुड़ने वाली प्रोग्रामिंग - ब्लॉक-आधारित
![]() शिक्षक टूलबॉक्स
-
गतिविधि रूपरेखा
शिक्षक टूलबॉक्स
-
गतिविधि रूपरेखा
-
यह अन्वेषण विद्यार्थियों को दाएं, बाएं मुड़ने और प्रतीक्षा करने के बुनियादी प्रोग्रामिंग व्यवहारों से परिचित कराएगा।
-
ड्राइवट्रेन रोबोट कॉन्फ़िगरेशन का उपयोग करने से छात्रों को केवल [टर्न फॉर] ब्लॉक का चयन करके स्पीडबोट को मोड़ने के लिए प्रोग्राम करने में सक्षम बनाता है।
स्पीडबोट तैयार है!
यह अन्वेषण आपको अपने स्पीडबॉट के अनुसरण के लिए कुछ अच्छे प्रोजेक्ट बनाने में सक्षम बनाने के लिए उपकरण प्रदान करेगा।
- VEXcode V5 जिसका उपयोग इस अन्वेषण में किया जाएगा:
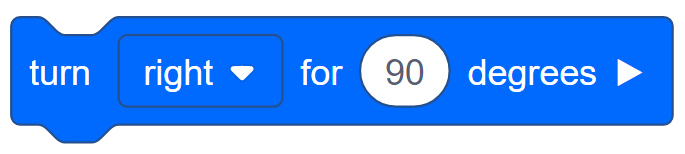
- ब्लॉक के बारे में अधिक जानकारी प्राप्त करने के लिए,सहायताखोलें और फिर [टर्न फॉर] ब्लॉक का चयन करें।

- सुनिश्चित करें कि आपके पास आवश्यक हार्डवेयर, आपकी इंजीनियरिंग नोटबुक और VEXcode V5 डाउनलोड और तैयार है।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
यदि छात्र पहली बार VEXcode V5 का उपयोग कर रहे हैं, तो वे इस अन्वेषण के दौरान किसी भी समय ट्यूटोरियल का संदर्भ ले सकते हैं। ट्यूटोरियल टूलबार में स्थित हैं।

| मात्रा | आवश्यक सामग्री |
|---|---|
| 1 |
स्पीडबॉट रोबोट |
| 1 |
चार्ज रोबोट बैटरी |
| 1 |
वेक्सकोड V5 |
| 1 |
यूएसबी केबल (यदि कंप्यूटर का उपयोग कर रहे हैं) |
| 1 |
इंजीनियरिंग नोटबुक |
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
स्पीडबोट तैयार है या नहीं, इसकी जांच के लिए प्रत्येक चरण का मॉडल बनाएं ताकि छात्रों को ऐसा करने की आदत हो जाए।
चरण 1: अन्वेषण की तैयारी
गतिविधि शुरू करने से पहले, क्या आपके पास इनमें से प्रत्येक वस्तु तैयार है? निम्नलिखित में से प्रत्येक की जाँच करें:
चरण 2: एक नई परियोजना शुरू करें
अपना प्रोजेक्ट शुरू करने से पहले, स्पीडबोट (ड्राइवट्रेन 2-मोटर्स, नो गायरो) - टेम्प्लेट प्रोजेक्ट का चयन करें। टेम्पलेट प्रोजेक्ट में स्पीडबॉट का मोटर कॉन्फ़िगरेशन शामिल है। यदि टेम्पलेट का उपयोग नहीं किया जाता है, तो आपका रोबोट प्रोजेक्ट को सही ढंग से नहीं चलाएगा।

टेम्पलेट प्रोजेक्ट खोलने के लिए निम्नलिखित चरण पूरे करें:
- फ़ाइल मेनू खोलें.
- उदाहरणखोलें का चयन करें.
- स्पीडबोट (ड्राइवट्रेन 2-मोटर्स, नो गायरो) टेम्पलेटप्रोजेक्ट का चयन करें और खोलें।
- चूंकि हम [Turn for] ब्लॉक का उपयोग करेंगे, इसलिए अपने प्रोजेक्ट का नाम बदलकर Turn.रखें।
- अपना प्रोजेक्टसहेजें.
-
यह सुनिश्चित करने के लिए जांचें कि प्रोजेक्ट का नामटर्नअब टूलबार के मध्य में विंडो में है।

![]() शिक्षक टूलबॉक्स
-
प्रोजेक्ट सहेजना
शिक्षक टूलबॉक्स
-
प्रोजेक्ट सहेजना
![]()
ध्यान दिला दें कि जब उन्होंने पहली बार VEXcode V5 खोला था, तो विंडो परVEXcode प्रोजेक्टलिखा था और इसे सेव नहीं किया गया था (जैसा कि टूलबार पर दर्शाया गया है)। जब VEXcode V5 को पहली बार खोला जाता है, तो VEXcode प्रोजेक्ट डिफ़ॉल्ट प्रोजेक्ट नाम होता है। जब परियोजना का नाम बदलकर टर्न कर दिया जाता है और उसे सहेज दिया जाता है, तो डिस्प्ले अपडेट होकर सहेजा जाता है। टूलबार में इस विंडो का उपयोग करके यह जांचना आसान है कि छात्र सही प्रोजेक्ट का उपयोग कर रहे हैं और यह सहेजा गया है। एक बार जब कोई प्रोजेक्ट आरंभ में सहेजा जाता है, तो VEXcode V5 किसी भी अनुवर्ती परिवर्तन को स्वतः सहेज लेता है, जैसा कि प्रोजेक्ट नाम के आगे दिए गए संदेश द्वारा दर्शाया जाता है।
विद्यार्थियों को बताएं कि वे अब अपना पहला प्रोजेक्ट शुरू करने के लिए तैयार हैं। छात्रों को समझाएं कि कुछ सरल चरणों का पालन करके, वे एक प्रोजेक्ट बना और चला सकेंगे जो स्पीडबोट को चालू कर देगा।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
चूंकि यह प्रोग्रामिंग के साथ एक प्रारंभिक गतिविधि है, इसलिए शिक्षक को चरणों का मॉडल बनाना चाहिए, और फिर छात्रों से वही क्रियाएं पूरी करने के लिए कहना चाहिए। इसके बाद शिक्षक को छात्रों पर निगरानी रखनी चाहिए ताकि यह सुनिश्चित हो सके कि वे चरणों का सही ढंग से पालन कर रहे हैं।
-
सुनिश्चित करें कि छात्रों ने फ़ाइल मेनू से OpenExamplesचयन किया है।
-
सुनिश्चित करें कि छात्रों ने स्पीडबोट (ड्राइवट्रेन 2-मोटर्स, नो गायरो) टेम्पलेटप्रोजेक्टचयन किया है।
आप विद्यार्थियों को बता सकते हैं किउदाहरणपृष्ठ पर चुनने के लिए कई विकल्प हैं। जैसे-जैसे वे अन्य रोबोट बनाएंगे और उनका उपयोग करेंगे, उन्हें विभिन्न टेम्पलेट्स का उपयोग करने का अवसर मिलेगा।
-
आप विद्यार्थियों से परियोजना के नाम में अपना आद्याक्षर या अपने समूह का नाम जोड़ने के लिए कह सकते हैं। यदि आप विद्यार्थियों से परियोजनाएं प्रस्तुत करने के लिए कहेंगे तो इससे परियोजनाओं में अंतर करने में मदद मिलेगी।
चरण 3: दाएँ मुड़ें
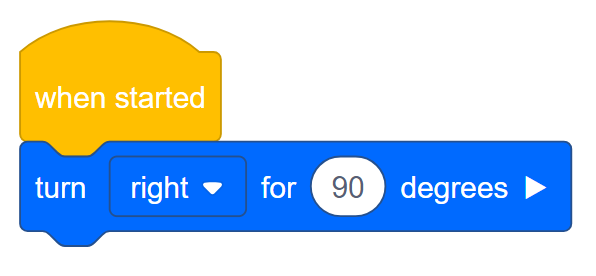
- प्रोग्रामिंग क्षेत्र में {When started}ब्लॉक में [Turn for] ब्लॉक जोड़ें।

- स्लॉटआइकन पर क्लिक करें। आप अपने प्रोजेक्ट को रोबोट ब्रेन में उपलब्धस्लॉटमें से किसी एक पर डाउनलोड कर सकते हैं। संख्या1पर क्लिक करें।

- रोबोट को अपने कंप्यूटर या टैबलेट से कनेक्ट करें। एक बार सफल कनेक्शन हो जाने पर टूलबार में ब्रेन आइकन हरा हो जाता है।

- रोबोट ब्रेन पर टर्न प्रोजेक्ट डाउनलोड करने के लिए टूलबार परडाउनलोडबटन पर क्लिक करें।
![]() शिक्षक टूलबॉक्स
-
ब्लॉकों के साथ सहायता
शिक्षक टूलबॉक्स
-
ब्लॉकों के साथ सहायता
-
बता दें कि प्रोग्रामिंग क्षेत्र में पहले से ही डिफ़ॉल्ट रूप से {When started} ब्लॉक स्थित है। प्रत्येक परियोजना इसी ब्लॉक से शुरू होगी। जब परियोजना शुरू होगी तो जुड़े हुए ब्लॉकों का उसी क्रम में अनुसरण किया जाएगा जिस क्रम में उन्हें रखा गया है।
[टर्न फॉर] ब्लॉक पर क्लिक करके उसे प्रोग्रामिंग क्षेत्र में खींचकर {When started} ब्लॉक से जोड़ने का प्रदर्शन करें। जब यह जुड़ेगा तो आपको एक क्लिक की आवाज सुनाई देगी।
-
यदि आप कंप्यूटर का उपयोग कर रहे हैं, तो छात्र के पास VEX V5 रोबोट ब्रेन होना चाहिए जोकेबलका उपयोग करके कंप्यूटर से जुड़ा हो। यदि आप टैबलेट का उपयोग कर रहे हैं, तो VEX V5 रोबोट ब्रेन को स्मार्ट रेडियो का उपयोग करके टैबलेट से जोड़ा जाना चाहिए।
-
यदि छात्र कंप्यूटर का उपयोग कर रहे हैं, तो उनसे रोबोट ब्रेन से यूएसबी केबल को डिस्कनेक्ट करने के लिए कहें। किसी प्रोजेक्ट को चलाते समय रोबोट को कंप्यूटर से कनेक्ट करने पर, रोबोट कनेक्शन केबल को खींच सकता है।
![]() शिक्षक टूलबॉक्स
-
रुकें और चर्चा करें
शिक्षक टूलबॉक्स
-
रुकें और चर्चा करें
यह एक अच्छा बिन्दु है जहां रुककर विद्यार्थी को अपने पहले प्रोजेक्ट के संचालन पर विचार करने का मौका मिलता है। छात्रों के रूप में:
-
जब आपने प्रोजेक्ट चलाया तो स्पीडबॉट ने क्या किया?
-
क्या इसने वैसा ही व्यवहार किया जैसा आप परियोजना के आधार पर अपेक्षा करते थे?
आगे बढ़ने से पहले यह सुनिश्चित कर लें कि सभी छात्रों ने बिना किसी समस्या के यह चरण पूरा कर लिया है।

- रोबोट ब्रेन की स्क्रीन पर देखकर सुनिश्चित करें कि आपका प्रोजेक्ट स्पीडबोट के ब्रेन में डाउनलोड हो गया है। प्रोजेक्ट का नामस्लॉट 1में सूचीबद्ध होना चाहिए।
![]() शिक्षक टूलबॉक्स
-
मॉडल प्रथम
शिक्षक टूलबॉक्स
-
मॉडल प्रथम
सभी विद्यार्थियों को एक साथ प्रयास करने के लिए कहने से पहले कक्षा के सामने परियोजना को चलाने का मॉडल प्रस्तुत करें। छात्रों को एक जगह पर इकट्ठा करें और यदि स्पीडबोट को फर्श पर रखा जाए तो उसके चलने के लिए पर्याप्त जगह छोड़ दें। चूंकि स्पीडबोट तब तक प्रोजेक्ट को चलाता रहेगा जब तक रोबोट ब्रेन पर बैक बटन दबाया नहीं जाता, इसलिए शिक्षक स्पीडबोट के प्रोजेक्ट के समाप्त होने पर उसे रोकने में सहायता के लिए किसी व्यक्ति को चुन सकते हैं।
विद्यार्थियों से कहें कि अब उनकी परियोजना चलाने की बारी है। सुनिश्चित करें कि उनके पास स्पष्ट रास्ता हो और कोई स्पीडबॉट एक दूसरे से न टकराए।
- स्पीडबोट रोबोट पर प्रोजेक्ट चलाएं, सुनिश्चित करें कि प्रोजेक्ट चयनित है और फिर रन बटन दबाएं।
चरण 4: बाएं मुड़ें

- दाएँके बजायबाएँप्रदर्शित करने के लिए [Turn for] को बदलें।
- परियोजना डाउनलोड करें.
- सुनिश्चित करें कि प्रोजेक्ट चयनित है और फिर रन बटन दबाएँ, स्पीडबोट रोबोट पर प्रोजेक्ट।
![]() शिक्षक टूलबॉक्स
-
चरण 4 पूरा करना
शिक्षक टूलबॉक्स
-
चरण 4 पूरा करना
-
[Turn for] ब्लॉक कोrightसेleftमें बदलने के लिए, बस ड्रॉपडाउन मेनू पर क्लिक करें औरleftचयन करें।
-
यदि छात्र कंप्यूटर का उपयोग कर रहे हैं, तो उन्हें प्रोजेक्ट चलाने से पहले रोबोट ब्रेन से यूएसबी केबल को डिस्कनेक्ट करने की याद दिलाएं।
चूंकि हम नया स्लॉट नहीं चुन रहे हैं, इसलिए नया प्रोजेक्ट स्लॉट 1 पर डाउनलोड हो जाएगा और पिछले प्रोजेक्ट को प्रतिस्थापित कर देगा।
-
चूंकि VEXcode V5 में ऑटोसेव है, इसलिए प्रोजेक्ट को दोबारा सेव करने की कोई आवश्यकता नहीं है।
चरण 5: रुकें, फिर बाएँ मुड़ें
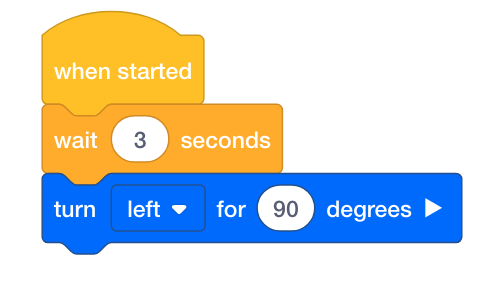
- [Turn for] ब्लॉक से पहले [Wait] ब्लॉक जोड़ें. इससे रोबोट को बायीं ओर मुड़ने से पहले प्रतीक्षा करने का संकेत मिलेगा।
- [प्रतीक्षा] ब्लॉक में तीन सेकंड डालें. यह रोबोट को मुड़ने से पहले तीन मिनट तक प्रतीक्षा करने को कहता है।
- परियोजना डाउनलोड करें.
- सुनिश्चित करें कि प्रोजेक्ट चयनित है और फिर रन बटन दबाएँ, स्पीडबोट रोबोट पर प्रोजेक्ट।
![]() शिक्षक टूलबॉक्स
-
चरण 5 पूरा करना
शिक्षक टूलबॉक्स
-
चरण 5 पूरा करना
-
[प्रतीक्षा] ब्लॉक को परियोजना में कहीं भी रखा जा सकता है। [प्रतीक्षा] ब्लॉक पर अधिक जानकारी के लिए,सहायताखोलें।
-
[Wait] ब्लॉक का उपयोग करने से परियोजना समाप्त नहीं होगी.
-
यदि छात्र कंप्यूटर का उपयोग कर रहे हैं, तो उन्हें प्रोजेक्ट चलाने से पहले रोबोट ब्रेन से यूएसबी केबल को डिस्कनेक्ट करने की याद दिलाएं।
-
चूंकि VEXcode V5 में ऑटोसेव है, इसलिए प्रोजेक्ट को दोबारा सेव करने की कोई आवश्यकता नहीं है।
![]() चर्चा को प्रेरित करें
-
अवरोधों को समझना
चर्चा को प्रेरित करें
-
अवरोधों को समझना
प्रश्न:रोबोट की वर्तमान स्थिति को शून्य डिग्री पर देखते हुए, यदि रोबोट 90 डिग्री बायीं ओर मुड़ा, फिर 120 डिग्री दायीं ओर मुड़ा, और 40 डिग्री बायीं ओर मुड़कर समाप्त हुआ, तो मुड़ने के बाद रोबोट वर्तमान में कितने डिग्री पर होगा?
उत्तर:रोबोट 10 डिग्री पर होगा। 90 डिग्री बायीं ओर मुड़ने के बाद रोबोट 120 डिग्री दायीं ओर मुड़ गया। बायीं ओर मुड़ने को सकारात्मक दिशा में आगे बढ़ना तथा दायीं ओर मुड़ने को नकारात्मक दिशा में घटने या आगे बढ़ने के रूप में देखना - xy निर्देशांक तल के समान, यह अब रोबोट को -30 डिग्री पर रखता है। चूँकि 90-120 = -30. -30 डिग्री से रोबोट 40 डिग्री बायीं ओर मुड़ जाता है। इस प्रकार, -30 + 40 = 10. रोबोट 10 डिग्री पर समाप्त होता है।
प्रश्न:रोबोट की वर्तमान स्थिति को शून्य डिग्री पर देखते हुए, रोबोट को 30 डिग्री दाईं ओर मोड़ने पर रोबोट उसी स्थान पर समाप्त होगा, जहां शून्य डिग्री से शुरू करके रोबोट को 330 डिग्री बाईं ओर मोड़ा गया था। यदि रोबोट 56 डिग्री दाईं ओर मुड़ता है, तो यह मानते हुए कि रोबोट शून्य डिग्री से शुरू होता है, उसी स्थान पर समाप्त होने के लिए रोबोट को कितने डिग्री बाईं ओर मुड़ना होगा?
A:चूंकि रोबोट को पूरी तरह से घुमाना 360 डिग्री है, इसलिए आप 360 डिग्री में जोड़ और घटा सकते हैं ताकि यह गणना की जा सके कि रोबोट को कितना मुड़ना होगा। 360 - 56 = 304. इस प्रकार, रोबोट को बाईं ओर 304 डिग्री घूमना पड़ेगा, तभी वह दाईं ओर 56 डिग्री घूमेगा।
चरण 6: सुरक्षा कैमरा चुनौती पूरी करें!

सुरक्षा कैमरा चैलेंज में, रोबोट को 90 डिग्री दाईं ओर मुड़कर शुरुआत करनी होगी। इसके बाद रोबोट 180 डिग्री बायीं ओर और फिर 180 डिग्री दायीं ओर घूमकर सुरक्षा कैमरे की तरह "स्कैनिंग" करेगा। इसके बाद रोबोट दो बार और 180 डिग्री बायीं ओर तथा 180 डिग्री दायीं ओर घूमेगा। इस प्रकार, रोबोट कुल तीन बार 180 डिग्री स्कैन करेगा।
रोबोट को प्रोग्राम करने से पहले, अपनी इंजीनियरिंग नोटबुक में रोबोट के पथ और व्यवहार की योजना बनाएं।
सुरक्षा कैमरा चुनौती को पूरा करने के बाद, आप और भी उन्नत चुनौतियों को पूरा करने के लिए अतिरिक्त रोबोट व्यवहार के साथ आगे और पीछे की गतिविधियों को संयोजित करने में सक्षम होंगे।
![]() शिक्षक टूलबॉक्स
-
समाधान
शिक्षक टूलबॉक्स
-
समाधान
- नीचे नमूना समाधान देखें।
- छात्रों मूल्यांकन करने के एक प्रोग्रामिंग रूब्रिक यहां पाया जा सकता है (Google .docx .pdf)।

अधिक उन्नत समाधान के लिए, छात्र को [रिपीट] ब्लॉक का उपयोग करके लूप से भी परिचित कराया जा सकता है। [दोहराएँ] ब्लॉक के बारे में अधिक जानकारी के लिए,सहायतादेखें।

![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
रोबोट की प्रारंभिक स्थिति को देखकर यह सत्यापित करें कि रोबोट ने चुनौती सफलतापूर्वक पूरी कर ली है, तथा यह सुनिश्चित करने के लिए गिनती करें कि रोबोट ने सही कार्य किए हैं। रोबोट को 90 डिग्री तक दाईं ओर मुड़ना चाहिए, फिर तीन बार दोहराना चाहिए: 180 डिग्री तक बाईं ओर मुड़ना चाहिए और 180 डिग्री तक दाईं ओर मुड़ना चाहिए।