
Sağa ve Sola Dönme Programlaması - Blok Tabanlı
![]() Öğretmen Araç Kutusu
-
Etkinlik Taslağı
Öğretmen Araç Kutusu
-
Etkinlik Taslağı
-
Bu keşif öğrencilere temel sağa, sola dönme ve bekleme programlama davranışlarını tanıtacaktır.
-
Aktarma organları robotu yapılandırmasını kullanmak, öğrencilerin sadece [Dön] bloğunu seçerek Speedbot'u dönecek şekilde programlamalarını sağlar.
Speedbot dönmeye hazır!
Bu keşif, Speedbot'unuzun takip etmesi için bazı harika projeler oluşturmaya başlayabilmeniz için size araçlar verecektir.
- Bu keşifte kullanılacak VEXcode V5:
- Blok hakkında daha fazla bilgi edinmek içinYardımaçın ve ardından [Döndür] bloğunu seçin.

- Gerekli donanıma, mühendislik dizüstü bilgisayarınıza ve VEXcode V5 'e sahip olduğunuzdan emin olun.
![]() Öğretmen İpuçları
Öğretmen İpuçları
Eğer öğrenci VEXcode V5'i ilk kez kullanıyorsa, bu keşif sırasında istediği zaman Eğitimlere başvurabilir. Eğitimler araç çubuğunda yer almaktadır.

| Adet | Gerekli Malzemeler |
|---|---|
| 1 |
Speedbot Robot |
| 1 |
Şarjlı Robot Pili |
| 1 |
VEXcode V5 |
| 1 |
USB Kablosu (bilgisayar kullanıyorsanız) |
| 1 |
Mühendislik Defteri |
![]() Öğretmen İpuçları
Öğretmen İpuçları
-
Öğrencilerin bunu alışkanlık haline getirmeleri için Speedbot'un hazır olup olmadığını kontrol etmek için her adımı modelleyin.
Adım 1: Keşfe Hazırlık
Etkinliğe başlamadan önce, bu öğelerin her birini hazır bulunduruyor musunuz? Aşağıdakilerin her birini kontrol edin:
- Akıllı kablolartam olaraktüm motorlara mı takılmış?
- Beyinmi açılıyor?
- Pilşarjlı mımi?
2. Adım: Yeni Bir Projeye Başlayın
Projenize başlamadan önce Speedbot (Drivetrain 2 - motors, No Gyro) - Şablon projesini seçin. Şablon projesi Speedbot'un motor konfigürasyonunu içerir. Şablon kullanılmazsa, robotunuz projeyi doğru şekilde çalıştırmayacaktır.

Şablon projesini açmak için aşağıdaki adımları tamamlayın:
- Dosya menüsünü açın.
- Açık Örnekleri Seçin.
- Speedbot (Aktarma Organları 2 Motorlu, Jiroskop Yok) şablonunu seçin ve açınprojesi.
- [Turn for] bloğunu kullanacağımız için projenizi Turn olarak yeniden adlandırın.
- Projenizikaydedin.
-
Araç çubuğunun ortasındaki pencerede artıkTurnprojesinin adının olduğundan emin olun.

![]() Öğretmen Araç Kutusu
-
Projeleri Kaydetme
Öğretmen Araç Kutusu
-
Projeleri Kaydetme
![]()
VEXcode V5'i ilk açtıklarında pencereninVEXcode Projesiolarak etiketlendiğini ve kaydedilmediğini (araç çubuğunda belirtildiği gibi) belirtin. VEXcode V5 ilk açıldığında varsayılan proje adı VEXcode Projesi'dir. Projenin adı Turn olarak değiştirilip kaydedildiğinde, görüntü Kaydedildi olarak güncellenir. Araç çubuğundaki bu pencereyi kullanarak öğrencilerin doğru projeyi kullanıp kullanmadığını ve kaydedip kaydetmediğini kontrol etmek kolaydır. Bir proje ilk kez kaydedildiğinde, VEXcode V5 proje adının yanındaki mesajda belirtildiği gibi sonraki değişiklikleri otomatik olarak kaydeder.
Öğrencilere artık ilk projelerine başlamaya hazır olduklarını söyleyin. Öğrencilere, birkaç basit adımı izleyerek Speedbot'u döndürecek bir proje oluşturabileceklerini ve çalıştırabileceklerini açıklayın.
![]() Öğretmen İpuçları
Öğretmen İpuçları
-
Bu, programlamaya başlangıç düzeyinde bir etkinlik olduğundan, öğretmen adımları modellemeli ve ardından öğrencilerden aynı eylemleri tamamlamalarını istemelidir. Öğretmen daha sonra öğrencilerin adımları doğru bir şekilde takip ettiğinden emin olmak için onları izlemelidir.
-
Öğrencilerin Dosya menüsündenÖrnekaçtığından emin olun.
-
Öğrencilerin Speedbot (Aktarma Organları 2 Motorlu, Jiroskop Yok) şablonuprojeseçtiğinden emin olun.
ÖğrencilereÖrneksayfasında seçebilecekleri birkaç seçenek olduğunu belirtebilirsiniz. Başka robotlar inşa edip kullandıkça farklı şablonları kullanma şansına sahip olacaklar.
-
Öğrencilerden proje ismine kendi adlarının baş harflerini veya gruplarının adını eklemelerini isteyebilirsiniz. Öğrencilerden projelerini sunmalarını istemeniz, projelerin farklılaştırılmasına yardımcı olacaktır.
Adım 3: Sağa Dönün
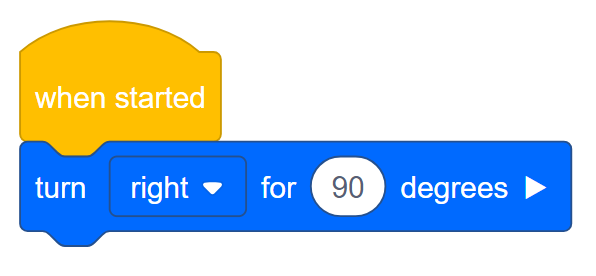
- Programlama alanındaki {When started}bloğuna [Turn for] bloğunu ekleyin.

- Slotikonuna tıklayın. Projenizi Robot Beyni'ndekislottan birine indirebilirsiniz. 1sayısına tıklayın.

- Robotu bilgisayarınıza veya tabletinize bağlayın. Başarılı bir bağlantı kurulduktan sonra araç çubuğundaki Beyin simgesi yeşile döner.

- Robot Brain'e Turn projesini indirmek için araç çubuğundakiİndirbutonuna tıklayın.
![]() Öğretmen Araç Kutusu
-
Bloklarla İlgili Yardım
Öğretmen Araç Kutusu
-
Bloklarla İlgili Yardım
-
Programlama alanında varsayılan olarak {When started} bloğunun zaten bulunduğunu belirtelim. Her proje bu blokla başlayacak. Proje başlatıldığında bağlı bloklar yerleştirildikleri sıraya göre takip edilecektir.
[Turn for] bloğuna tıklayıp programlama alanına sürükleyerek {When started} bloğuna bağlamayı gösterin. Takıldığında bir tık sesi duyacaksınız.
-
Bilgisayar kullanılıyorsa öğrencinin VEX V5 Robot BeyniUSB kablosu kullanılarak bilgisayara bağlı olmalıdır Eğer tablet kullanıyorsanız VEX V5 Robot Beyni Akıllı Radyo kullanılarak tablete bağlanmalıdır.
-
Eğer öğrenciler bilgisayar kullanıyorlarsa, onlardan şimdi Robot Beyni'nden USB kablosunu çıkarmalarını isteyin. Bir projeyi çalıştırırken robotun bilgisayara bağlı olması, robotun bağlantı kablosunu çekmesine neden olabilir.
![]() Öğretmen Araç Kutusu
-
Durun ve Tartışın
Öğretmen Araç Kutusu
-
Durun ve Tartışın
Bu, öğrencinin ilk projesini yürütmeyi düşünmesi için iyi bir noktadır. Öğrenciler olarak:
-
Projeyi yürüttüğünüzde Speedbot ne yaptı?
-
Projeye göre beklediğiniz gibi davrandı mı?
Devam etmeden önce tüm öğrencilerin bu adımı sorunsuz bir şekilde tamamladığından emin olmak için bir dakikanızı ayırın.

- Robot Beyninin ekranına bakarak projenizin Speedbot'un Beynine indirildiğinden emin olun. Proje adıslot 1listelenmelidir.
![]() Öğretmen Araç Kutusu
-
Model İlk
Öğretmen Araç Kutusu
-
Model İlk
Tüm öğrencilerin aynı anda denemesini sağlamadan önce projeyi sınıfın önünde modellemek. Öğrencileri bir alanda toplayın ve Speedbot yere konulduğunda hareket edebilmesi için yeterli alan bırakın. Speedbot, Robot Beyni'ndeki geri tuşuna basılana kadar projeyi çalıştırmaya devam edeceğinden, öğretmen Speedbot'un projesi bittiğinde onu durdurmaya yardımcı olacak birini seçmek isteyebilir.
Öğrencilere projelerini yürütme sırasının artık onlarda olduğunu söyleyin. Onlara açık bir yol olduğundan ve hiçbir Speedbot'un birbirine çarpmayacağından emin olun.
- Projenin seçildiğinden emin olarak projeyi Speedbot robotunda çalıştırın ve ardından Çalıştır düğmesine basın.
4. Adım: Sola dönün

- [Turn for]sağyerinesolgösterecek şekilde değiştirin.
- Projeyi.
- Projenin seçili olduğundan emin olduktan sonra Runbutonuna basarak projeyi Speedbot robotunda çalıştırın.
![]() Öğretmen Araç Kutusu
-
4. Adımı Tamamlama
Öğretmen Araç Kutusu
-
4. Adımı Tamamlama
-
[Turn for] bloğunurightleftdeğiştirmek için, açılır menüye tıklamanız veleftseçmeniz yeterlidir.
-
Eğer öğrenciler bilgisayar kullanıyorsa, projeyi çalıştırmadan önce Robot Beyni'nden USB kablosunu çıkarmaları gerektiğini hatırlatın.
Yeni bir slot seçmediğimiz için yeni proje 1. slota indirilecek ve önceki projenin yerini alacak.
-
VEXcode V5'te otomatik kaydetme özelliği bulunduğundan projeyi tekrar kaydetmeye gerek yoktur.
Adım 5: Bekleyin, ardından Sola Dönün
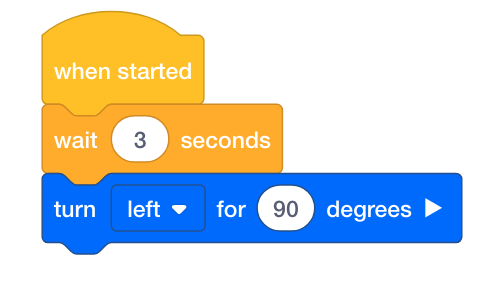
- [Turn for] bloğundan önce [Wait] bloğunu ekleyin. Bu, robota sola dönmeden önce beklemesini söyleyecektir.
- [Bekle] bloğuna üç saniye ekleyin. Bu, robota dönmeden önce üç saniye beklemesini söyler.
- Projeyi.
- Projenin seçili olduğundan emin olduktan sonra Runbutonuna basarak projeyi Speedbot robotunda çalıştırın.
![]() Öğretmen Araç Kutusu
-
5. Adımı Tamamlama
Öğretmen Araç Kutusu
-
5. Adımı Tamamlama
-
[Wait] bloğu projede herhangi bir yere yerleştirilebilir. [Wait] bloğu hakkında daha fazla bilgi içinYardımaçın.
-
[Wait] bloğunun kullanılması projeyi sonlandırmaz.
-
Eğer öğrenciler bilgisayar kullanıyorsa, projeyi çalıştırmadan önce Robot Beyni'nden USB kablosunu çıkarmaları gerektiğini hatırlatın.
-
VEXcode V5'te otomatik kaydetme özelliği bulunduğundan projeyi tekrar kaydetmeye gerek yoktur.
![]() Tartışmayı Motive Etme
-
Blokları Anlama
Tartışmayı Motive Etme
-
Blokları Anlama
S:Robotun şu anki konumunu sıfır derecede görüntüleyelim. Robot 90 derece sola dönerse, sonra 120 derece sağa dönerse ve 40 derece sola dönerek bitirirse, dönüşünü bitirdikten sonra robot şu anda kaç derecede olur?
C:Robot 10 derecede olacaktır. Robot 90 derece sola döndükten sonra 120 derece sağa döndü. Sola dönmeyi pozitif yönde hareket etmek, sağa dönmeyi ise eksi yönde hareket etmek veya çıkarmak olarak gördüğümüzde - xy koordinat düzlemine benzer şekilde - robotu artık -30 dereceye yerleştiriyoruz. 90-120 = -30 olduğundan. -30 dereceden itibaren robot 40 derece sola dönüyor. Bu durumda -30 + 40 = 10 olur. Robot 10 derecede sonlanıyor.
S:Robotun mevcut konumunu sıfır derecede görüntüleyip, robotu 30 derece sağa çevirdiğinizde, robot sıfır dereceden başlayıp 330 derece sola çevirdiğinizdeki aynı noktada bitirecektir. Robot 56 derece sağa dönerse ve sıfır dereceden başladığını varsayarsak aynı yerde sonlanmak için kaç derece sola dönmesi gerekir?
A:Robotu tamamen döndürmek 360 derece olduğundan, robotun ne kadar dönmesi gerektiğini hesaplamak için 360 dereceden toplama ve çıkarma yapabilirsiniz. 360 - 56 = 304. Yani robotun 56 derece sağa dönmesiyle aynı noktada sonlanabilmesi için 304 derece sola dönmesi gerekecek.
6. Adım: Güvenlik Kamerası Görevini Tamamlayın!

Güvenlik Kamerası Mücadelesinde robot 90 derece sağa dönerek başlamalıdır. Robot daha sonra tıpkı bir güvenlik kamerası gibi 180 derece sola ve 180 derece sağa "tarama" yapacak. Robot daha sonra 180 derece sola ve 180 derece sağa dönüşü iki kez daha tekrarlayacak. Böylece robot toplamda üç kez 180 derecelik bir tarama yapacaktır.
Robotu programlamadan önce, robotun yolunu ve davranışlarını mühendislik not defterinize planlayın.
Güvenlik Kamerası Mücadelesini tamamladıktan sonra, ileri ve geri hareketleri ek robot davranışlarıyla birleştirerek daha da gelişmiş mücadeleleri tamamlayabileceksiniz.
![]() Öğretmen Araç Kutusu
-
Çözümleri
Öğretmen Araç Kutusu
-
Çözümleri


![]() Öğretmen İpuçları
Öğretmen İpuçları
Robotun başlangıç pozisyonunu izleyerek ve robotun doğru eylemleri gerçekleştirdiğinden emin olmak için sayarak robotun görevi başarıyla tamamladığını doğrulayın. Robot 90 derece sağa dönmeli, ardından bu işlemi üç kez tekrarlamalı: 180 derece sola dönmeli ve 180 derece sağa dönmelidir.