
ബ്ലോക്കുകൾ അടിസ്ഥാനമാക്കിയുള്ള പ്രോഗ്രാമിംഗ് വലത്തോട്ടും ഇടത്തോട്ടും തിരിയുന്നു
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
-
ഈ പര്യവേഷണം വിദ്യാർത്ഥികളെ അടിസ്ഥാന വലത്തോട്ടും ഇടത്തോട്ടും തിരിയുന്നതിനും കാത്തിരിക്കുന്നതിനുമുള്ള പ്രോഗ്രാമിംഗ് സ്വഭാവങ്ങൾ പരിചയപ്പെടുത്തും.
-
ഡ്രൈവ്ട്രെയിൻ റോബോട്ട് കോൺഫിഗറേഷൻ ഉപയോഗിക്കുന്നത്, [ടേൺ ഫോർ] ബ്ലോക്ക് തിരഞ്ഞെടുത്ത് സ്പീഡ്ബോട്ടിനെ തിരിയാൻ പ്രോഗ്രാം ചെയ്യാൻ വിദ്യാർത്ഥികളെ പ്രാപ്തമാക്കുന്നു.
സ്പീഡ്ബോട്ട് തിരിയാൻ തയ്യാറാണ്!
നിങ്ങളുടെ സ്പീഡ്ബോട്ടിന് പിന്തുടരുന്നതിനായി ചില രസകരമായ പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ തുടങ്ങുന്നതിനുള്ള ഉപകരണങ്ങൾ ഈ പര്യവേക്ഷണം നിങ്ങൾക്ക് നൽകും.
- ഈ പര്യവേഷണത്തിൽ ഉപയോഗിക്കുന്ന VEXcode V5:
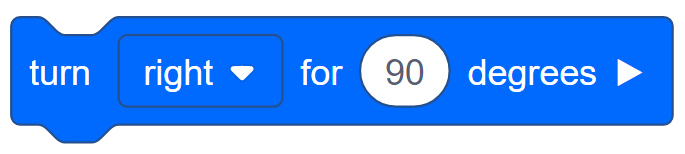
- ബ്ലോക്കിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾ കണ്ടെത്താൻ,ഹെൽപ്പ്തുറന്ന് [Turn for] ബ്ലോക്ക് തിരഞ്ഞെടുക്കുക.

- ആവശ്യമായ ഹാർഡ്വെയർ, എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക്, VEXcode V5 എന്നിവ ഡൗൺലോഡ് ചെയ്ത് തയ്യാറായിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
വിദ്യാർത്ഥി ആദ്യമായി VEXcode V5 ഉപയോഗിക്കുകയാണെങ്കിൽ, ഈ പര്യവേക്ഷണ വേളയിൽ ഏത് സമയത്തും അവർക്ക് ട്യൂട്ടോറിയലുകൾ റഫർ ചെയ്യാൻ കഴിയും. ട്യൂട്ടോറിയലുകൾ ടൂൾബാറിലാണ് സ്ഥിതി ചെയ്യുന്നത്.

| അളവ് | ആവശ്യമായ വസ്തുക്കൾ |
|---|---|
| 1 |
സ്പീഡ്ബോട്ട് റോബോട്ട് |
| 1 |
ചാർജ്ജ് ചെയ്ത റോബോട്ട് ബാറ്ററി |
| 1 |
VEXcode V5 |
| 1 |
യുഎസ്ബി കേബിൾ (കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ) |
| 1 |
എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക് |
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
-
സ്പീഡ്ബോട്ട് തയ്യാറാണോ എന്ന് പരിശോധിക്കുന്നതിനുള്ള ഓരോ ഘട്ടത്തിന്റെയും മാതൃക തയ്യാറാക്കുക, അതുവഴി വിദ്യാർത്ഥികൾക്ക് അത് ശീലമാക്കാൻ കഴിയും.
ഘട്ടം 1: പര്യവേക്ഷണത്തിനുള്ള തയ്യാറെടുപ്പ്
പ്രവർത്തനം ആരംഭിക്കുന്നതിന് മുമ്പ്, ഈ ഇനങ്ങൾ ഓരോന്നും നിങ്ങളുടെ കൈവശം തയ്യാറായിട്ടുണ്ടോ? ഇനിപ്പറയുന്നവയിൽ ഓരോന്നും പരിശോധിക്കുക:
- എല്ലാ മോട്ടോറുകളിലും സ്മാർട്ട് കേബിളുകൾപൂർണ്ണമായുംചേർത്തിട്ടുണ്ടോ?
- ബ്രെയിൻഓൺ ആണോ?
- ബാറ്ററിചാർജ്ജ്ആണോ?
ഘട്ടം 2: ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുക
നിങ്ങളുടെ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിന് മുമ്പ്, സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോറുകൾ, ഗൈറോ ഇല്ല) - ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തിരഞ്ഞെടുക്കുക. ടെംപ്ലേറ്റ് പ്രോജക്റ്റിൽ സ്പീഡ്ബോട്ടിന്റെ മോട്ടോർ കോൺഫിഗറേഷൻ അടങ്ങിയിരിക്കുന്നു. ടെംപ്ലേറ്റ് ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, നിങ്ങളുടെ റോബോട്ട് പ്രോജക്റ്റ് ശരിയായി പ്രവർത്തിപ്പിക്കില്ല.

ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തുറക്കാൻ ഇനിപ്പറയുന്ന ഘട്ടങ്ങൾ പൂർത്തിയാക്കുക:
- ഫയൽ മെനു തുറക്കുക.
- തിരഞ്ഞെടുക്കുക ഉദാഹരണങ്ങൾതുറക്കുക.
- സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോറുകൾ, ഗൈറോ ഇല്ല) ടെംപ്ലേറ്റ്പ്രോജക്റ്റ് തിരഞ്ഞെടുത്ത് തുറക്കുക.
- നമ്മൾ [Turn for] ബ്ലോക്ക് ഉപയോഗിക്കുന്നതിനാൽ, നിങ്ങളുടെ പ്രോജക്റ്റ് Turn എന്ന് പുനർനാമകരണം ചെയ്യുക.
- നിങ്ങളുടെ പ്രോജക്റ്റ്സംരക്ഷിക്കുക.
-
ടൂൾബാറിന്റെ മധ്യത്തിലുള്ള വിൻഡോയിൽ ഇപ്പോൾ പ്രോജക്റ്റ് നാമംടേൺആണെന്ന് ഉറപ്പാക്കുക.

![]() ടീച്ചർ ടൂൾബോക്സ്
-
സേവിംഗ് പ്രോജക്റ്റുകൾ
ടീച്ചർ ടൂൾബോക്സ്
-
സേവിംഗ് പ്രോജക്റ്റുകൾ
![]()
അവർ ആദ്യം VEXcode V5 തുറന്നപ്പോൾ, വിൻഡോVEXcode Projectഎന്ന് ലേബൽ ചെയ്തിരുന്നുവെന്നും അത് സേവ് ചെയ്തിട്ടില്ലെന്നും (ടൂൾബാറിൽ സൂചിപ്പിച്ചിരിക്കുന്നു) ചൂണ്ടിക്കാണിക്കുക. VEXcode V5 ആദ്യമായി തുറക്കുമ്പോൾ, VEXcode Project എന്നത് ഡിഫോൾട്ട് പ്രോജക്റ്റ് നാമമാണ്. പ്രോജക്റ്റ് ടേൺ എന്ന് പുനർനാമകരണം ചെയ്ത് സേവ് ചെയ്തുകഴിഞ്ഞാൽ, ഡിസ്പ്ലേ സേവ്ഡ് ആയി അപ്ഡേറ്റ് ചെയ്യപ്പെടും. ടൂൾബാറിലെ ഈ വിൻഡോ ഉപയോഗിച്ച്, വിദ്യാർത്ഥികൾ ശരിയായ പ്രോജക്റ്റ് ഉപയോഗിക്കുന്നുണ്ടോ എന്നും അത് സേവ് ചെയ്തിട്ടുണ്ടോ എന്നും പരിശോധിക്കാൻ എളുപ്പമാണ്. ഒരു പ്രോജക്റ്റ് പ്രാരംഭമായി സേവ് ചെയ്തുകഴിഞ്ഞാൽ, പ്രോജക്റ്റ് പേരിന് അടുത്തുള്ള സന്ദേശം സൂചിപ്പിക്കുന്നത് പോലെ, VEXcode V5 തുടർന്നുള്ള എല്ലാ മാറ്റങ്ങളും ഓട്ടോസേവ് ചെയ്യുന്നു.
വിദ്യാർത്ഥികൾ അവരുടെ ആദ്യ പ്രോജക്റ്റ് ആരംഭിക്കാൻ ഇപ്പോൾ തയ്യാറാണെന്ന് അവരോട് പറയുക. കുറച്ച് ലളിതമായ ഘട്ടങ്ങൾ പാലിക്കുന്നതിലൂടെ, സ്പീഡ്ബോട്ടിനെ രൂപാന്തരപ്പെടുത്തുന്ന ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കാനും പ്രവർത്തിപ്പിക്കാനും അവർക്ക് കഴിയുമെന്ന് വിദ്യാർത്ഥികളോട് വിശദീകരിക്കുക.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
-
ഇത് പ്രോഗ്രാമിംഗോടുകൂടിയ ഒരു ആരംഭ പ്രവർത്തനമായതിനാൽ, അധ്യാപകൻ ഘട്ടങ്ങൾ മാതൃകയാക്കണം, തുടർന്ന് അതേ പ്രവർത്തനങ്ങൾ പൂർത്തിയാക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടണം. തുടർന്ന് അധ്യാപകൻ വിദ്യാർത്ഥികൾ ഘട്ടങ്ങൾ ശരിയായി പാലിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കാൻ അവരെ നിരീക്ഷിക്കണം.
-
ഫയൽ മെനുവിൽ നിന്ന് വിദ്യാർത്ഥികൾ OpenExamplesതിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
-
വിദ്യാർത്ഥികൾ സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോറുകൾ, ഗൈറോ ഇല്ല) ടെംപ്ലേറ്റ്പ്രോജക്റ്റ്തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
ഉദാഹരണങ്ങൾപേജിൽ നിന്ന് തിരഞ്ഞെടുക്കാൻ നിരവധി തിരഞ്ഞെടുപ്പുകൾ ഉണ്ടെന്ന് നിങ്ങൾക്ക് വിദ്യാർത്ഥികളെ ചൂണ്ടിക്കാണിക്കാം. അവർ മറ്റ് റോബോട്ടുകൾ നിർമ്മിക്കുകയും ഉപയോഗിക്കുകയും ചെയ്യുമ്പോൾ, അവർക്ക് വ്യത്യസ്ത ടെംപ്ലേറ്റുകൾ ഉപയോഗിക്കാനുള്ള അവസരം ലഭിക്കും.
-
പ്രോജക്റ്റ് നാമത്തിൽ വിദ്യാർത്ഥികളോട് അവരുടെ ഇനീഷ്യലുകളോ ഗ്രൂപ്പിന്റെ പേരോ ചേർക്കാൻ ആവശ്യപ്പെടാം. വിദ്യാർത്ഥികളോട് പ്രോജക്ടുകൾ സമർപ്പിക്കാൻ ആവശ്യപ്പെടുകയാണെങ്കിൽ, അവ വ്യത്യസ്തമാക്കാൻ ഇത് സഹായിക്കും.
ഘട്ടം 3: വലത്തേക്ക് തിരിയുക
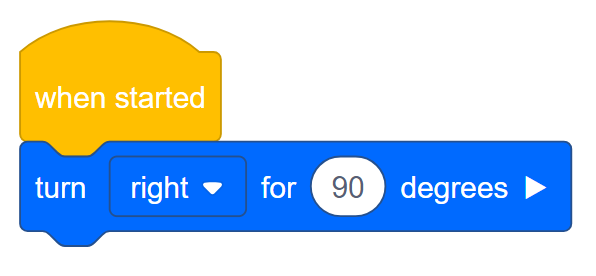
- പ്രോഗ്രാമിംഗ് ഏരിയയിലെ {When started}ബ്ലോക്കിലേക്ക് [Turn for] ബ്ലോക്ക് ചേർക്കുക.

- സ്ലോട്ട്ഐക്കണിൽ ക്ലിക്ക് ചെയ്യുക. റോബോട്ട് ബ്രെയിനിൽ ലഭ്യമായ നാല്സ്ലോട്ടുകളിൽ-ൽ ഒന്നിലേക്ക് നിങ്ങളുടെ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യാം. 1എന്ന നമ്പറിൽ ക്ലിക്ക് ചെയ്യുക.

- റോബോട്ട് നിങ്ങളുടെ കമ്പ്യൂട്ടറിലേക്കോ ടാബ്ലെറ്റിലേക്കോ ബന്ധിപ്പിക്കുക. കണക്ഷൻ വിജയകരമായി സംഭവിച്ചുകഴിഞ്ഞാൽ, ടൂൾബാറിലെ ബ്രെയിൻ ഐക്കൺ പച്ചയായി മാറുന്നു.

- ടേൺ പ്രോജക്റ്റ് ടു ദി റോബോട്ട് ബ്രെയിൻ ഡൗൺലോഡ് ചെയ്യാൻ ടൂൾബാറിലെഡൗൺലോഡ്ബട്ടൺ ക്ലിക്ക് ചെയ്യുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ബ്ലോക്കുകൾക്കുള്ള സഹായം
ടീച്ചർ ടൂൾബോക്സ്
-
ബ്ലോക്കുകൾക്കുള്ള സഹായം
-
പ്രോഗ്രാമിംഗ് ഏരിയയിൽ, സ്ഥിരസ്ഥിതിയായി ഇതിനകം തന്നെ ഒരു {When started} ബ്ലോക്ക് ഉണ്ടെന്ന് ചൂണ്ടിക്കാണിക്കുക. എല്ലാ പദ്ധതികളും ഈ ബ്ലോക്കിൽ നിന്നാണ് ആരംഭിക്കുന്നത്. പദ്ധതി ആരംഭിക്കുമ്പോൾ, ബന്ധിപ്പിച്ച ബ്ലോക്കുകൾ അവ സ്ഥാപിച്ചിരിക്കുന്ന ക്രമത്തിൽ പിന്തുടരും.
[Turn for] ബ്ലോക്കിൽ ക്ലിക്ക് ചെയ്ത് പ്രോഗ്രാമിംഗ് ഏരിയയിലേക്ക് ഡ്രാഗ് ചെയ്ത് {When started} ബ്ലോക്കിലേക്ക് ബന്ധിപ്പിക്കുന്നത് പ്രദർശിപ്പിക്കുക. അത് അറ്റാച്ച് ചെയ്യുമ്പോൾ ഒരു ക്ലിക്ക് കേൾക്കും.
-
നിങ്ങൾ ഒരു കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ, വിദ്യാർത്ഥിയുടെ VEX V5 റോബോട്ട് ബ്രെയിൻUSB കേബിൾഉപയോഗിച്ച് കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിച്ചിരിക്കണം. നിങ്ങൾ ഒരു ടാബ്ലെറ്റ് ഉപയോഗിക്കുകയാണെങ്കിൽ, സ്മാർട്ട് റേഡിയോ ഉപയോഗിച്ച് VEX V5 റോബോട്ട് ബ്രെയിൻ ടാബ്ലെറ്റുമായി ബന്ധിപ്പിക്കണം.
-
വിദ്യാർത്ഥികൾ കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ, റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ അവരോട് ഇപ്പോൾ ആവശ്യപ്പെടുക. ഒരു പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ റോബോട്ട് ഒരു കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നത് റോബോട്ട് കണക്ഷൻ കേബിളിൽ വലിക്കാൻ ഇടയാക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ഇത് ഒരു നല്ല കാര്യമാണ്, വിദ്യാർത്ഥിക്ക് അവരുടെ ആദ്യ പ്രോജക്റ്റ് എങ്ങനെ നടത്താമെന്ന് ചിന്തിക്കാൻ അനുവദിക്കുക. വിദ്യാർത്ഥികൾ എന്ന നിലയിൽ:
-
നിങ്ങൾ പ്രോജക്റ്റ് നടത്തിയപ്പോൾ സ്പീഡ്ബോട്ട് എന്താണ് ചെയ്തത്?
-
പ്രോജക്റ്റ് അനുസരിച്ച്, നിങ്ങൾ പ്രതീക്ഷിക്കുന്നതുപോലെയാണോ അത് പ്രവർത്തിച്ചത്?
മുന്നോട്ട് പോകുന്നതിനുമുമ്പ് എല്ലാ വിദ്യാർത്ഥികളും ഈ ഘട്ടം ഒരു പ്രശ്നവുമില്ലാതെ പൂർത്തിയാക്കിയെന്ന് ഉറപ്പാക്കാൻ ഒരു നിമിഷം എടുക്കുക.

- റോബോട്ട് ബ്രെയിനിന്റെ സ്ക്രീൻ നോക്കി നിങ്ങളുടെ പ്രോജക്റ്റ് സ്പീഡ്ബോട്ടിന്റെ ബ്രെയിനിലേക്ക് ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. പ്രോജക്റ്റ് നാമംസ്ലോട്ടിൽ 1ൽ ലിസ്റ്റ് ചെയ്തിരിക്കണം.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
മോഡൽ ആദ്യം
ടീച്ചർ ടൂൾബോക്സ്
-
മോഡൽ ആദ്യം
എല്ലാ വിദ്യാർത്ഥികളെയും ഒരുമിച്ച് പരീക്ഷിക്കുന്നതിന് മുമ്പ്, ക്ലാസ്സിന് മുന്നിൽ പ്രോജക്റ്റ് നടത്തുന്ന മാതൃക. വിദ്യാർത്ഥികളെ ഒരു സ്ഥലത്ത് ഒരുമിച്ചുകൂട്ടുക, സ്പീഡ്ബോട്ട് തറയിൽ വച്ചാൽ അതിന് നീങ്ങാൻ മതിയായ ഇടം നൽകുക. റോബോട്ട് ബ്രെയിനിലെ ബാക്ക് ബട്ടൺ അമർത്തുന്നത് വരെ സ്പീഡ്ബോട്ട് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുന്നത് തുടരുന്നതിനാൽ, സ്പീഡ്ബോട്ടിന്റെ പ്രോജക്റ്റ് പൂർത്തിയാകുമ്പോൾ അത് നിർത്താൻ സഹായിക്കുന്നതിന് അധ്യാപകന് ആരെയെങ്കിലും തിരഞ്ഞെടുക്കാൻ താൽപ്പര്യമുണ്ടാകാം.
വിദ്യാർത്ഥികളോട് പറയുക, ഇനി അവരുടെ പ്രോജക്റ്റ് നടത്താനുള്ള ഊഴമാണ്. അവയ്ക്ക് വ്യക്തമായ പാതയുണ്ടെന്നും സ്പീഡ്ബോട്ടുകളൊന്നും പരസ്പരം കൂട്ടിയിടിക്കുന്നില്ലെന്നും ഉറപ്പാക്കുക.
- പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കി സ്പീഡ്ബോട്ട് റോബോട്ടിൽ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക, തുടർന്ന് റൺ ബട്ടൺ അമർത്തുക.
ഘട്ടം 4: ഇടത്തേക്ക് തിരിയുക

- [Turn for] എന്നത്rightഎന്നതിന് പകരംleftഎന്ന് പ്രദർശിപ്പിക്കുന്ന തരത്തിലേക്ക് മാറ്റുക.
- പ്രോജക്റ്റ്ഡൗൺലോഡ് ചെയ്യുക.
- പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കി സ്പീഡ്ബോട്ട് റോബോട്ടിൽ പ്രോജക്റ്റ്പ്രവർത്തിപ്പിക്കുക, തുടർന്ന് റൺ ബട്ടൺ അമർത്തുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 4 പൂർത്തിയാക്കുന്നു
ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 4 പൂർത്തിയാക്കുന്നു
-
[Turn for] ബ്ലോക്ക്rightൽ നിന്ന്leftആക്കി മാറ്റാൻ, ഡ്രോപ്പ്ഡൗൺ മെനുവിൽ ക്ലിക്ക് ചെയ്ത്leftതിരഞ്ഞെടുക്കുക.
-
വിദ്യാർത്ഥികൾ ഒരു കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ, പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുന്നതിന് മുമ്പ് റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ അവരെ ഓർമ്മിപ്പിക്കുക.
നമ്മൾ പുതിയൊരു സ്ലോട്ട് തിരഞ്ഞെടുക്കാത്തതിനാൽ, പുതിയ പ്രോജക്റ്റ് സ്ലോട്ട് 1-ലേക്ക് ഡൗൺലോഡ് ചെയ്യുകയും മുമ്പത്തെ പ്രോജക്റ്റ് മാറ്റിസ്ഥാപിക്കുകയും ചെയ്യും.
-
VEXcode V5-ൽ ഓട്ടോസേവ് ഉള്ളതിനാൽ, പ്രോജക്റ്റ് വീണ്ടും സേവ് ചെയ്യേണ്ട ആവശ്യമില്ല.
ഘട്ടം 5: കാത്തിരിക്കുക, തുടർന്ന് ഇടത്തേക്ക് തിരിയുക
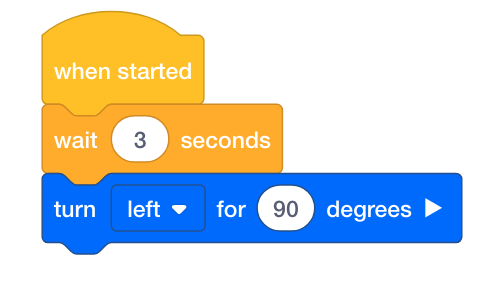
- [Turn for] ബ്ലോക്കിന് മുമ്പ് ഒരു [Wait] ബ്ലോക്ക് ചേർക്കുക. ഇത് റോബോട്ടിനോട് ഇടത്തേക്ക് തിരിയുന്നതിന് മുമ്പ് കാത്തിരിക്കാൻ പറയും.
- [കാത്തിരിക്കുക] ബ്ലോക്കിലേക്ക് മൂന്ന് സെക്കൻഡ് ചേർക്കുക. ഇത് റോബോട്ടിനോട് തിരിയുന്നതിന് മുമ്പ് മൂന്ന് മണിക്കൂർ കാത്തിരിക്കാൻ പറയുന്നു.
- പ്രോജക്റ്റ്ഡൗൺലോഡ് ചെയ്യുക.
- പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കി സ്പീഡ്ബോട്ട് റോബോട്ടിൽ പ്രോജക്റ്റ്പ്രവർത്തിപ്പിക്കുക, തുടർന്ന് റൺ ബട്ടൺ അമർത്തുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 5 പൂർത്തിയാക്കുന്നു
ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 5 പൂർത്തിയാക്കുന്നു
-
പ്രോജക്റ്റിൽ എവിടെയും ഒരു [കാത്തിരിക്കുക] ബ്ലോക്ക് സ്ഥാപിക്കാവുന്നതാണ്. [Wait] ബ്ലോക്കിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്,Helpതുറക്കുക.
-
ഒരു [Wait] ബ്ലോക്ക് ഉപയോഗിക്കുന്നത് പ്രോജക്റ്റ് അവസാനിപ്പിക്കില്ല.
-
വിദ്യാർത്ഥികൾ ഒരു കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ, പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുന്നതിന് മുമ്പ് റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ അവരെ ഓർമ്മിപ്പിക്കുക.
-
VEXcode V5-ൽ ഓട്ടോസേവ് ഉള്ളതിനാൽ, പ്രോജക്റ്റ് വീണ്ടും സേവ് ചെയ്യേണ്ട ആവശ്യമില്ല.
![]() ചർച്ചയെ പ്രചോദിപ്പിക്കുക
-
ബ്ലോക്കുകൾ മനസ്സിലാക്കൽ
ചർച്ചയെ പ്രചോദിപ്പിക്കുക
-
ബ്ലോക്കുകൾ മനസ്സിലാക്കൽ
ചോദ്യം:പൂജ്യം ഡിഗ്രിയിൽ റോബോട്ടിന്റെ നിലവിലെ സ്ഥാനം കാണുമ്പോൾ, റോബോട്ട് 90 ഡിഗ്രി ഇടത്തേക്ക് തിരിഞ്ഞ്, പിന്നീട് 120 ഡിഗ്രി വലത്തേക്ക് തിരിഞ്ഞ്, 40 ഡിഗ്രി ഇടത്തേക്ക് തിരിഞ്ഞ് പൂർത്തിയാക്കിയാൽ, തിരിയൽ പൂർത്തിയാക്കിയ ശേഷം റോബോട്ട് നിലവിൽ എത്ര ഡിഗ്രിയിലായിരിക്കും?
എ:റോബോട്ട് 10 ഡിഗ്രിയിലായിരിക്കും. 90 ഡിഗ്രി ഇടത്തേക്ക് തിരിഞ്ഞ ശേഷം, റോബോട്ട് 120 ഡിഗ്രി വലത്തേക്ക് തിരിഞ്ഞു. ഒരു xy കോർഡിനേറ്റ് തലം പോലെ, ഇടത്തേക്ക് തിരിയുന്നത് പോസിറ്റീവ് ദിശയിലേക്ക് നീങ്ങുന്നതായി കാണുകയും വലത്തേക്ക് തിരിയുന്നത് നെഗറ്റീവ് ദിശയിലേക്ക് കുറയ്ക്കുകയോ നീങ്ങുകയോ ചെയ്യുന്നു, ഇത് ഇപ്പോൾ റോബോട്ടിനെ -30 ഡിഗ്രിയിൽ നിർത്തുന്നു. 90-120 = -30 മുതൽ. -30 ഡിഗ്രിയിൽ നിന്ന്, റോബോട്ട് 40 ഡിഗ്രി ഇടത്തേക്ക് തിരിയുന്നു. അങ്ങനെ, -30 + 40 = 10. റോബോട്ട് 10 ഡിഗ്രിയിൽ അവസാനിക്കുന്നു.
ചോദ്യം:പൂജ്യം ഡിഗ്രിയിൽ റോബോട്ടിന്റെ നിലവിലെ സ്ഥാനം കാണുമ്പോൾ, റോബോട്ടിനെ 30 ഡിഗ്രി വലത്തേക്ക് തിരിക്കുമ്പോൾ, പൂജ്യം ഡിഗ്രിയിൽ നിന്ന് ആരംഭിച്ച് റോബോട്ടിനെ 330 ഡിഗ്രി ഇടത്തേക്ക് തിരിക്കുന്ന അതേ സ്ഥാനത്ത് റോബോട്ട് ഫിനിഷ് ചെയ്യും. റോബോട്ട് വലത്തേക്ക് 56 ഡിഗ്രി തിരിഞ്ഞാൽ, പൂജ്യം ഡിഗ്രിയിൽ നിന്നാണ് ആരംഭിക്കുന്നതെന്ന് കരുതുക, റോബോട്ട് എത്ര ഡിഗ്രി ഇടത്തേക്ക് തിരിയണം?
എ:റോബോട്ട് പൂർണ്ണമായും കറങ്ങുന്നത് 360 ഡിഗ്രി ആയതിനാൽ, റോബോട്ട് എങ്ങനെ തിരിയണമെന്ന് കണക്കാക്കാൻ നിങ്ങൾക്ക് 360 ഡിഗ്രിയിൽ നിന്ന് കൂട്ടുകയും കുറയ്ക്കുകയും ചെയ്യാം. 360 - 56 = 304. അങ്ങനെ, റോബോട്ട് 56 ഡിഗ്രി വലത്തേക്ക് തിരിയുന്ന അതേ സ്ഥലത്ത് തന്നെ അവസാനിക്കണമെങ്കിൽ 304 ഡിഗ്രി ഇടത്തേക്ക് തിരിയേണ്ടിവരും.
ഘട്ടം 6: സുരക്ഷാ ക്യാമറ ചലഞ്ച് പൂർത്തിയാക്കുക!

സെക്യൂരിറ്റി ക്യാമറ ചലഞ്ചിൽ, റോബോട്ട് 90 ഡിഗ്രി വലത്തേക്ക് തിരിഞ്ഞാണ് ആരംഭിക്കേണ്ടത്. പിന്നീട് റോബോട്ട് ഒരു സുരക്ഷാ ക്യാമറ പോലെ ഇടത്തോട്ടും പിന്നെ വലത്തോട്ടും 180 ഡിഗ്രി "സ്കാൻ" ചെയ്യും. തുടർന്ന് റോബോട്ട് 180 ഡിഗ്രി ഇടത്തോട്ടും 180 ഡിഗ്രി വലത്തോട്ടും രണ്ടുതവണ കൂടി തിരിയുന്നത് ആവർത്തിക്കും. അങ്ങനെ, റോബോട്ട് ആകെ 180 ഡിഗ്രി മൂന്ന് തവണ സ്കാൻ ചെയ്യും.
റോബോട്ട് പ്രോഗ്രാം ചെയ്യുന്നതിനുമുമ്പ്, നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ റോബോട്ടിന്റെ പാതയും പെരുമാറ്റരീതികളും ആസൂത്രണം ചെയ്യുക.
സുരക്ഷാ ക്യാമറ ചലഞ്ച് പൂർത്തിയാക്കിയ ശേഷം, കൂടുതൽ വിപുലമായ വെല്ലുവിളികൾ പൂർത്തിയാക്കുന്നതിന് നിങ്ങൾക്ക് മുന്നോട്ടും പിന്നോട്ടും ചലനങ്ങൾ അധിക റോബോട്ട് പെരുമാറ്റരീതികളുമായി സംയോജിപ്പിക്കാൻ കഴിയും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരങ്ങൾ
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരങ്ങൾ
- താഴെ കൊടുത്തിരിക്കുന്ന സാമ്പിൾ സൊല്യൂഷൻ കാണുക.
- വിദ്യാർത്ഥികളെ വിലയിരുത്തുന്നതിനുള്ള ഒരു പ്രോഗ്രാമിംഗ് റൂബ്രിക് ഇവിടെ കാണാം (Google / .docx / .pdf).

കൂടുതൽ വിപുലമായ ഒരു പരിഹാരത്തിനായി, [ആവർത്തിക്കുക] ബ്ലോക്ക് ഉപയോഗിച്ച് ഒരു വിദ്യാർത്ഥിയെ ലൂപ്പുകളിലേക്ക് പരിചയപ്പെടുത്താനും കഴിയും. [ആവർത്തിക്കുക] ബ്ലോക്കിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്,സഹായംകാണുക.

![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
റോബോട്ടിന്റെ ആരംഭ സ്ഥാനം നിരീക്ഷിച്ചുകൊണ്ട് റോബോട്ട് വെല്ലുവിളി വിജയകരമായി പൂർത്തിയാക്കി എന്ന് ഉറപ്പാക്കുക, കൂടാതെ റോബോട്ട് ശരിയായ പ്രവർത്തനങ്ങൾ നിർവഹിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കാൻ എണ്ണുക. റോബോട്ട് 90 ഡിഗ്രി വലത്തേക്ക് തിരിയണം, തുടർന്ന് മൂന്ന് തവണ ആവർത്തിക്കണം: 180 ഡിഗ്രി ഇടത്തേക്ക് ഒരു തിരിവും 180 ഡിഗ്രി വലത്തേക്ക് ഒരു തിരിവും.