
Pemrograman Belok Kanan dan Kiri - Berbasis Blok
 Kotak Alat Guru
-
Garis Besar Aktivitas
Kotak Alat Guru
-
Garis Besar Aktivitas
-
Eksplorasi ini akan memperkenalkan siswa pada perilaku pemrograman dasar berbelok ke kanan, kiri, dan menunggu.
-
Menggunakan konfigurasi robot drivetrain memungkinkan siswa untuk memprogram Speedbot agar berbelok hanya dengan memilih blok [Belok untuk].
Speedbot siap untuk berbelok!
Eksplorasi ini akan memberi Anda alat untuk dapat mulai membuat beberapa proyek menarik yang dapat diikuti oleh Speedbot Anda.
- VEXcode V5 yang akan digunakan dalam eksplorasi ini:

- Pastikan Anda telah mengunduh dan menyiapkan perangkat keras yang diperlukan, buku catatan teknik, dan VEXcode V5.
 Tips Guru
Tips Guru
Jika ini adalah pertama kalinya siswa menggunakan VEXcode V5, mereka dapat merujuk Tutorial kapan saja selama eksplorasi ini. Tutorial ada di bilah alat.

| Kuantitas | Bahan-bahan yang Dibutuhkan |
|---|---|
| 1 |
Robot Speedbot |
| 1 |
Baterai Robot Terisi |
| 1 |
Kode VEX V5 |
| 1 |
Kabel USB (jika menggunakan komputer) |
| 1 |
Buku Catatan Teknik |
Tips Guru
-
Modelkan setiap langkah untuk memeriksa apakah Speedbot sudah siap sehingga siswa akan terbiasa melakukannya.
Langkah 1: Persiapan Eksplorasi
Sebelum Anda memulai kegiatan, apakah Anda sudah menyiapkan masing-masing barang ini? Periksa masing-masing hal berikut ini:
- Apakah kabel pintardimasukkan sepenuhnyake semua motor?
- Apakah Otakdihidupkan?
- Apakah bateraiterisi?
Langkah 2: Mulai Proyek Baru
Sebelum Anda memulai proyek Anda, pilih proyek Speedbot (Drivetrain 2-motor, Tanpa Gyro) - Template. Proyek templat berisi konfigurasi motor Speedbot. Jika templat tidak digunakan, robot Anda tidak akan menjalankan proyek dengan benar.
Selesaikan langkah-langkah berikut untuk membuka proyek templat:
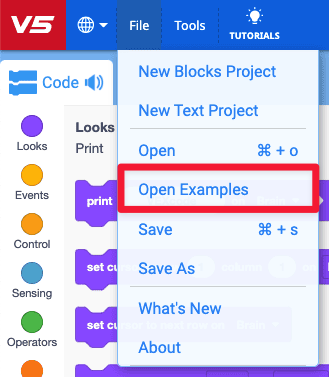
- Buka menu File.
- PilihBuka Contoh.
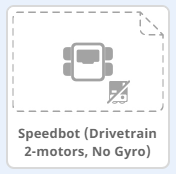
- Pilih dan buka proyek templat Speedbot (Drivetrain 2-motor, Tanpa Gyro).
- Karena kita akan menggunakan blok [Turn for], ganti nama proyek Anda Turn.
- Simpanproyek Anda.
-
Periksa untuk memastikan nama proyekTurnsekarang ada di jendela di tengah bilah alat.

Kotak Alat Guru
-
Menyimpan Proyek
![]()
Tunjukkan bahwa ketika mereka pertama kali membuka VEXcode V5, jendelanya diberi labelVEXcode Projectdan tidak disimpan (ditunjukkan pada bilah alat). Proyek VEXcode adalah nama proyek default saat VEXcode V5 pertama kali dibuka. Setelah proyek diubah namanya menjadi Turn dan disimpan, tampilannya akan diperbarui menjadi Tersimpan. Dengan menggunakan jendela ini di bilah alat, mudah untuk memeriksa apakah siswa menggunakan proyek yang benar dan proyek tersebut telah disimpan. Setelah proyek awalnya disimpan, VEXcode V5 secara otomatis menyimpan setiap perubahan berikutnya, seperti yang ditunjukkan oleh pesan di samping nama proyek.
Beri tahu siswa bahwa mereka sekarang siap untuk memulai proyek pertama mereka. Jelaskan kepada siswa bahwa dengan mengikuti beberapa langkah sederhana, mereka akan dapat membuat dan menjalankan proyek yang akan memutar Speedbot.
Tips Guru
-
Karena ini merupakan kegiatan awal pemrograman, guru harus memodelkan langkah-langkahnya, lalu meminta siswa untuk menyelesaikan tindakan yang sama. Guru kemudian harus memantau siswa untuk memastikan bahwa mereka mengikuti langkah-langkah dengan benar.
-
Pastikan siswa telah memilih BukaContohdari menu File.
-
Pastikan siswa telah memilih templat Speedbot (Drivetrain 2-motor, Tanpa Gyro)proyek.
Anda dapat menunjukkan kepada siswa bahwa ada beberapa pilihan untuk dipilih pada halamanContoh. Saat mereka membangun dan menggunakan robot lain, mereka akan memiliki kesempatan untuk menggunakan templat yang berbeda.
-
Anda dapat meminta siswa untuk menambahkan inisial mereka atau nama kelompok mereka ke nama proyek. Ini akan membantu membedakan proyek jika Anda meminta siswa untuk menyerahkannya.
Langkah 3: Belok Kanan
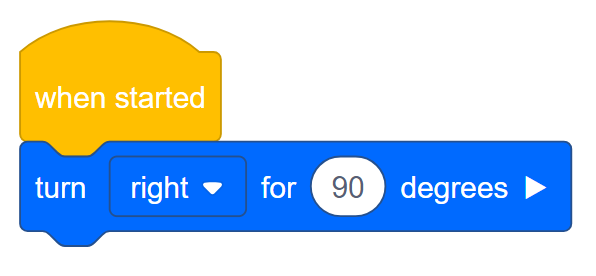
- Tambahkan blok [Putar untuk] ke blok {When started}di area pemrograman.

- Klik ikonSlot. Anda dapat mengunduh proyek Anda ke salah satu dari empat slotyang tersediadi Robot Brain. Klik angka1.

- Hubungkan robot ke komputer atau tablet Anda. Ikon Otak pada bilah alat berubah menjadi hijau setelah koneksi berhasil dibuat.

- Klik tombolUnduhpada bilah alat untuk mengunduh proyek Turn ke Robot Brain.
Kotak Alat Guru
-
Bantuan dengan Blok
-
Tunjukkan bahwa di area pemrograman, sudah ada blok {When started} yang terletak di sana secara default. Setiap proyek akan dimulai dengan blok ini. Saat proyek dimulai, blok-blok yang terhubung akan diikuti sesuai urutan penempatannya.
Tunjukkan dengan mengklik blok [Putar ke] dan menyeretnya ke area pemrograman, menghubungkannya ke blok {When started}. Anda akan mendengar bunyi klik saat menempel.
-
Jika Anda menggunakan komputer, siswa harus menghubungkan VEX V5 Robot Brain ke komputer menggunakan kabel USB. Jika Anda menggunakan tablet, VEX V5 Robot Brain harus dihubungkan ke tablet menggunakan Smart Radio.
-
Jika siswa menggunakan komputer, minta mereka sekarang untuk melepaskan kabel USB dari Robot Brain. Menghubungkan robot ke komputer saat menjalankan proyek dapat menyebabkan robot menarik kabel koneksi.
Kotak Alat Guru
-
Berhenti dan Diskusikan
Ini merupakan saat yang tepat untuk berhenti sejenak dan meminta siswa merenungkan tentang pelaksanaan proyek pertama mereka. Sebagai pelajar:
-
Apa yang dilakukan Speedbot saat Anda menjalankan proyek tersebut?
-
Apakah berperilaku seperti yang Anda harapkan, berdasarkan proyeknya?
Luangkan waktu sejenak untuk memastikan semua siswa telah menyelesaikan langkah ini tanpa masalah apa pun sebelum melanjutkan.

- Periksa untuk memastikan proyek Anda telah diunduh ke Otak Speedbot dengan melihat layar Otak Robot. Nama proyek harus dicantumkan pada slot1.
Kotak Alat Guru
-
Model Pertama
Model menjalankan proyek di depan kelas sebelum meminta semua siswa mencobanya sekaligus. Kumpulkan siswa di satu area dan sisakan cukup ruang bagi Speedbot untuk bergerak jika diletakkan di lantai. Karena Speedbot akan terus menjalankan proyek hingga tombol kembali pada Robot Brain ditekan, guru mungkin ingin memilih seseorang untuk membantu menghentikan proyek Speedbot ketika selesai.
Beritahukan siswa bahwa sekarang giliran mereka untuk menjalankan proyek mereka. Pastikan mereka memiliki jalur yang jelas dan tidak ada Speedbot yang bertabrakan satu sama lain.

Kotak Alat Guru
-
Menyelesaikan Langkah 4
-
Untuk mengubah blok [Putar ke] darikanankekiri, cukup klik pada menu tarik-turun dan pilihkiri.
-
Jika siswa menggunakan komputer, ingatkan mereka untuk melepaskan kabel USB dari Robot Brain sebelum menjalankan proyek.
Karena kami tidak memilih slot baru, proyek baru akan diunduh ke slot 1 dan menggantikan proyek sebelumnya.
-
Karena VEXcode V5 memiliki penyimpanan otomatis, tidak perlu menyimpan proyek lagi.
Langkah 5: Tunggu, lalu Belok Kiri
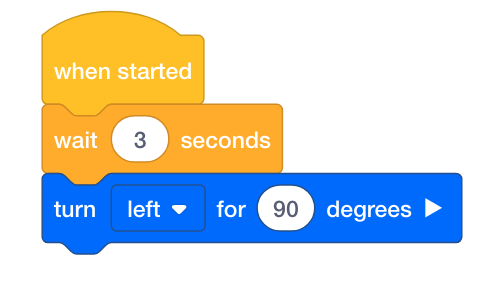
- Tambahkan blok [Tunggu] sebelum blok [Putar]. Ini akan memberitahu robot untuk menunggu sebelum berbelok ke kiri.
- Masukkan tiga detik ke dalam blok [Tunggu]. Ini memberitahu robot untuk menunggu tiga sebelum berputar.
- Unduhproyek.
- Jalankanproyek pada robot Speedbot dengan memastikan proyek dipilih lalu tekan tombol Jalankan.
Kotak Alat Guru
-
Menyelesaikan Langkah 5
-
Blok [Tunggu] dapat ditempatkan di mana saja dalam proyek. Untuk informasi lebih lanjut tentang blok [Tunggu], buka Bantuan.
-
Menggunakan blok [Tunggu] tidak akan mengakhiri proyek.
-
Jika siswa menggunakan komputer, ingatkan mereka untuk melepaskan kabel USB dari Robot Brain sebelum menjalankan proyek.
-
Karena VEXcode V5 memiliki penyimpanan otomatis, tidak perlu menyimpan proyek lagi.
 Motivasi Diskusi
-
Memahami Hambatan
Motivasi Diskusi
-
Memahami Hambatan
T:Melihat posisi robot saat ini pada nol derajat, jika robot berbelok ke kiri 90 derajat, lalu berbelok ke kanan 120 derajat, dan diakhiri dengan berbelok ke kiri 40 derajat, berapa derajat posisi robot saat ini setelah selesai berbelok?
J:Robot akan berada pada sudut 10 derajat. Setelah berbelok ke kiri 90 derajat, robot berbelok ke kanan 120 derajat. Melihat belokan ke kiri sebagai gerakan ke arah positif dan belokan ke kanan sebagai gerakan mengurangi atau gerakan ke arah negatif - serupa dengan bidang koordinat xy, ini sekarang menempatkan robot pada -30 derajat. Karena 90-120 = -30. Dari -30 derajat, robot berbelok ke kiri 40 derajat. Jadi, -30 + 40 = 10. Robot berakhir pada 10 derajat.
T:Melihat posisi robot saat ini pada nol derajat, memutar robot 30 derajat ke kanan akan membuat robot finis di tempat yang sama seperti memulai dari nol derajat dan memutar robot 330 derajat ke kiri. Jika robot berbelok ke kanan sejauh 56 derajat, berapa derajat ke kiri yang harus dibelokkan robot agar berakhir di tempat yang sama dengan asumsi robot mulai dari nol derajat?
A:Karena memutar robot sepenuhnya adalah 360 derajat, Anda dapat menambahkan dan mengurangi 360 derajat untuk menghitung seberapa jauh robot perlu berputar. 360 - 56 = 304. Jadi, robot harus berputar 304 derajat ke kiri untuk berakhir di tempat yang sama dengan berputar 56 derajat ke kanan.
Langkah 6: Selesaikan Tantangan Kamera Keamanan!

Dalam Tantangan Kamera Keamanan, robot harus mulai dengan berbelok ke kanan 90 derajat. Robot tersebut kemudian akan berputar ke kiri 180 derajat, lalu ke kanan 180 derajat, “memindai” seperti kamera keamanan. Robot kemudian akan mengulang putaran 180 derajat ke kiri dan 180 derajat ke kanan sebanyak dua kali lagi. Dengan demikian, robot akan memindai 180 derajat sebanyak tiga kali secara total.
Sebelum memprogram robot, rencanakan lintasan dan perilaku robot di buku catatan teknik Anda.
Setelah menyelesaikan Tantangan Kamera Keamanan, Anda akan dapat menggabungkan gerakan maju dan mundur dengan perilaku robot tambahan untuk menyelesaikan tantangan yang lebih sulit lagi.
Kotak Alat Guru
-
Solusi
- Lihat contoh solusi di bawah ini.
- Rubrik pemrograman untuk mengevaluasi siswa dapat ditemukan di sini (Google / .docx / .pdf).

Untuk solusi yang lebih maju, siswa juga dapat diperkenalkan dengan loop dengan menggunakan blok [Ulangi]. Untuk informasi lebih lanjut tentang blok [Ulangi], lihat Bantuan.

Tips Guru
Validasi bahwa robot berhasil menyelesaikan tantangan dengan memperhatikan posisi awal robot, dan hitung untuk memastikan bahwa robot telah melakukan tindakan yang benar. Robot harus berbelok ke kanan sejauh 90 derajat, lalu mengulanginya tiga kali: berbelok ke kiri sejauh 180 derajat dan berbelok ke kanan sejauh 180 derajat.