Der Speedbot ist drehbereit!
Diese Erkundung gibt Ihnen die Werkzeuge an die Hand, mit denen Sie einige coole Projekte erstellen können, denen Ihr Speedbot folgen kann.
-
VEXcode V5-Python-Anweisungen, die in dieser Untersuchung verwendet werden:
-
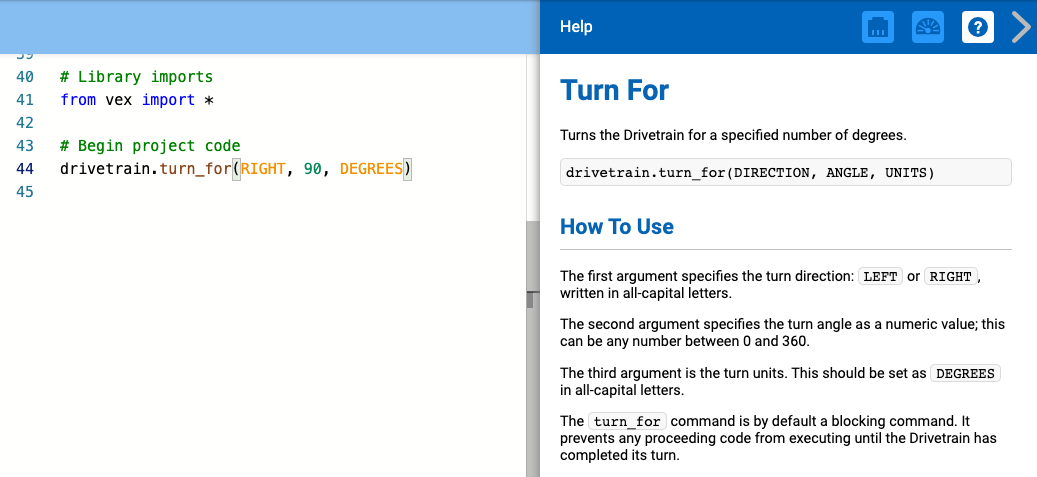
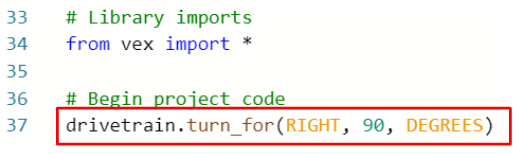
drivetrain.turn_for(RECHTS, 90, GRAD)
-
-
Um weitere Informationen zu der Anweisung zu erhalten, wählen Sie „Hilfe“ und dann das Fragezeichensymbol neben einem Befehl aus, um weitere Informationen anzuzeigen.
-
Stellen Sie sicher, dass Sie die erforderliche Hardware, Ihr Engineering-Notebook und VEXcode V5 heruntergeladen und bereit haben.
| Menge | Benötigte Materialien |
|---|---|
| 1 |
Speedbot-Roboter |
| 1 |
Geladener Roboterakku |
| 1 |
VEXcode V5 |
| 1 |
USB-Kabel (bei Verwendung eines Computers) |
| 1 |
Technisches Notizbuch |
Schritt 1: Vorbereitung auf die Erkundung
Halten Sie alle diese Gegenstände bereit, bevor Sie mit der Aktivität beginnen?
-
Sind alle Motoren an die richtigen Anschlüsse angeschlossen?
-
Sind die Smart-Kabel vollständig eingesteckt in alle Motoren?
-
Ist das Gehirn eingeschaltet?
-
Ist die Batterie geladen?
Schritt 2: Starten Sie ein neues Projekt
Führen Sie die folgenden Schritte aus, um mit dem Projekt zu beginnen:
-
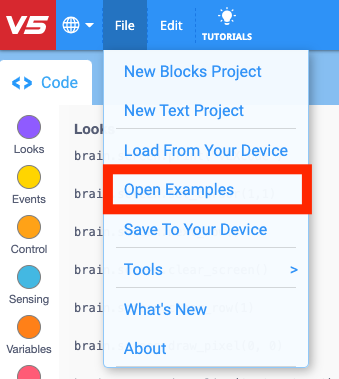
Öffnen Sie das Menü „Datei“ und wählen Sie „Beispiele öffnen“.
-
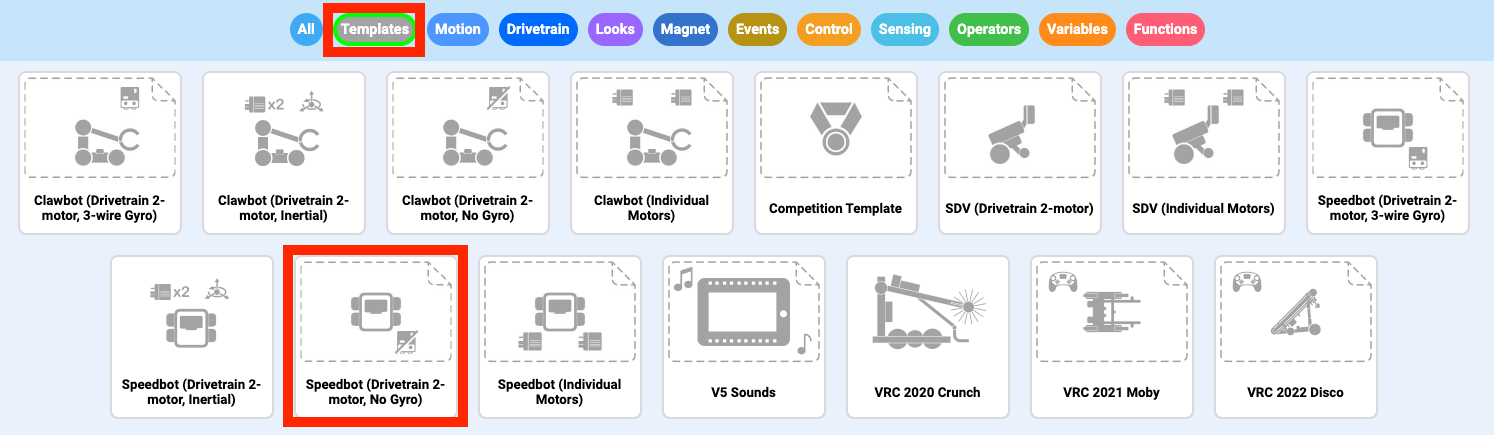
Wählen Sie das Vorlagenprojekt Speedbot (Drivetrain 2-motor, No Gyro) aus und öffnen Sie es. Das Vorlagenprojekt enthält die Motorkonfiguration des Speedbot. Wenn die Vorlage nicht verwendet wird, führt Ihr Roboter das Projekt nicht korrekt aus.
-
Da Sie daran arbeiten, den Speedbot zu drehen, nennen Sie Ihr Projekt Turn.

-
Wenn Sie fertig sind, wählen Sie Speichern.

![]() Tipps für Lehrer
Tipps für Lehrer
Projektnamen können zwischen oder nach den Wörtern Leerzeichen enthalten.
Schritt 3: Biegen Sie rechts ab
Jetzt können Sie mit der Programmierung des Roboters zum Rechtsabbiegen beginnen!
-
Fügen Sie die Anweisung zum Projekt hinzu:
-
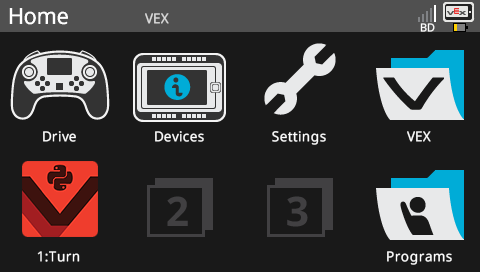
Wählen Sie das Slot-Symbol aus, um einen der acht verfügbaren Slots auf dem Robot Brain auszuwählen, und wählen Sie dann Slot 1 aus.
-
Verbinden Sie das V5 Robot Brain über ein Micro-USB-Kabel mit dem Computer und schalten Sie das V5 Robot Brain ein. Das Brain-Symbol in der Symbolleiste wird grün sobald eine erfolgreiche Verbindung hergestellt wurde.
-
Wenn das V5 Robot Brain mit dem Computer verbunden ist, ändert sich das Build-Symbol in das Download-Symbol. Wählen Sie Herunterladen um das Projekt in das Brain herunterzuladen.
![]() Lehrer-Toolbox
Lehrer-Toolbox
Erinnern Sie die Schüler daran, das USB-Kabel vom Robot Brain zu trennen. Wenn der Roboter während der Ausführung eines Projekts an einen Computer angeschlossen ist, kann es dazu führen, dass der Roboter am Verbindungskabel zieht.
![]() Lehrer-Toolbox
-
Halten Sie inne und diskutieren Sie
Lehrer-Toolbox
-
Halten Sie inne und diskutieren Sie
Bitten Sie die Schüler, vorherzusagen, was ihrer Meinung nach passieren wird, wenn dieses Projekt heruntergeladen und auf dem Speedbot ausgeführt wird. Bitten Sie die Schüler, ihre Vorhersagen in ihren technischen Notizbüchern festzuhalten. Wenn es die Zeit erlaubt, bitten Sie jede Gruppe, ihre Vorhersagen mitzuteilen.
-
Überprüfen Sie, ob Ihr Projekt heruntergeladen wurde (Python) , indem Sie auf den Bildschirm des Robot Brain schauen. Der Projektname Turn sollte in Slot 1 aufgeführt sein.
![]() Lehrer-Toolbox
–
Model First
Lehrer-Toolbox
–
Model First
-
Führen Sie das Projekt vor der Klasse vor, bevor alle Schüler es gleichzeitig versuchen. Versammeln Sie die Schüler in einem Bereich und lassen Sie genügend Platz, damit sich der Speedbot bewegen kann, wenn er auf den Boden gestellt wird.
-
Sagen Sie den Schülern, dass sie nun an der Reihe sind, ihr Projekt durchzuführen. Stellen Sie sicher, dass sie einen freien Weg haben und dass keine Speedbots aufeinander stoßen.
-
Erinnern Sie die Schüler daran, ihre Projekte während der Arbeit zu speichern. Dieser Abschnitt (Python) aus der VEX-Bibliothek erläutert Speicherpraktiken in VEXcode V5.
-
Führen Sie das Projekt (Python) auf dem Speedbot-Roboter aus Stellen Sie sicher, dass das Projekt ausgewählt ist, und drücken Sie dann Ausführen -Taste auf dem Robotergehirn.
Schritt 4: Biegen Sie links ab
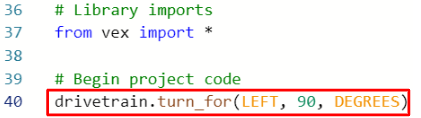
Nachdem Sie Ihren Roboter nun so programmiert haben, dass er nach rechts abbiegt, programmieren wir ihn jetzt so, dass er nach links abbiegt.
-
Ändern Sie den Parameter in der Anweisung so, dass er LINKS anstelle von RECHTS anzeigt.
-
Wählen Sie den Projektnamen aus, um ihn von zu ändern. Drehen Sie in und drehen Sie ihn nach links.
-
Wählen Sie das Slot-Symbol aus, um einen neuen Slot auszuwählen. Wählen Sie Steckplatz 2 aus.
-
Laden Sie (Python) das Projekt herunter.
-
Stellen Sie sicher, dass für Ihr Projekt heruntergeladen wurde (Python). indem Sie auf den Bildschirm des Robotergehirns schauen. Der Projektname TurnLeft sollte in Slot 2 aufgeführt sein.
-
Führen Sie (Python) das Projekt auf dem Roboter aus, indem Sie sicherstellen, dass das Projekt ausgewählt ist, und klicken Sie dann auf die Schaltfläche Ausführen.
Schritt 5: Warten Sie und biegen Sie dann links ab
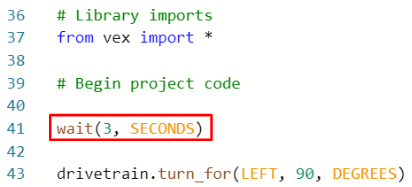
Nachdem wir den Roboter nun so programmiert haben, dass er nach links und dann nach rechts abbiegt, können wir nun eine Warte-Anweisung hinzufügen, damit der Roboter eine bestimmte Zeit wartet, bevor er nach links abbiegt.
-
Fügen Sie wie gezeigt eine Warten-Anweisung hinzu. Dadurch wird der Roboter angewiesen, drei Sekunden zu warten, bevor er nach links abbiegt.
-
Wählen Sie den Projektnamen aus, um ihn von TurnLeft in WaitLeft zu ändern.
-
Wählen Sie das Slot-Symbol aus, um einen neuen Slot auszuwählen. Wählen Sie Steckplatz 3 aus.
-
Laden Sie (Python) das Projekt herunter.
-
Stellen Sie sicher, dass für Ihr Projekt heruntergeladen wurde (Python). indem Sie auf den Bildschirm des Robotergehirns schauen. Der Projektname WaitLeft sollte in Slot 3 aufgeführt sein.
-
Führen Sie (Python) das Projekt auf dem Roboter aus, indem Sie sicherstellen, dass das Projekt ausgewählt ist, und klicken Sie dann auf die Schaltfläche Ausführen.
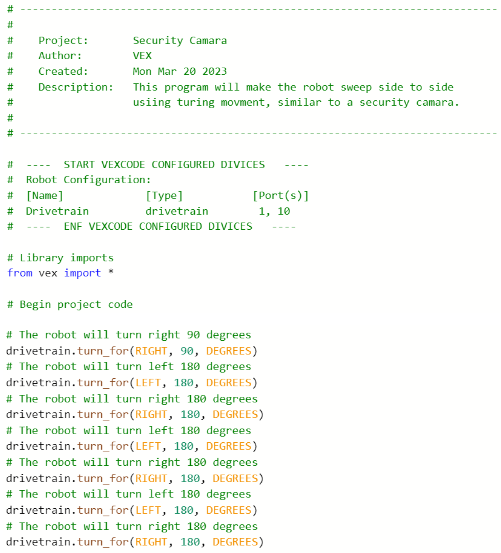
Schritt 6: Schließe die Überwachungskamera-Herausforderung ab!


Bei der Security Camera Challenge muss sich der Roboter zunächst um 90 Grad nach rechts drehen. Der Roboter dreht sich dann um 180 Grad nach links und dann um 180 Grad nach rechts und „scannt“ genau wie eine Überwachungskamera. Anschließend wiederholt der Roboter noch zweimal die Drehung um 180 Grad nach links und um 180 Grad nach rechts. Somit scannt der Roboter insgesamt dreimal 180 Grad.
Bevor Sie den Roboter programmieren, planen Sie den Weg und das Verhalten des Roboters in Ihrem technischen Notizbuch.
Nach Abschluss der Überwachungskamera-Herausforderung können Sie Vorwärts- und Rückwärtsbewegungen mit zusätzlichen Roboterverhalten kombinieren, um noch anspruchsvollere Herausforderungen zu meistern.
![]() Lehrer-Toolbox
–
Lösung
Lehrer-Toolbox
–
Lösung
Sehen Sie sich unten eine Beispiellösung an: