Speedbot готовий до повороту!
Це дослідження дасть вам інструменти, щоб почати створювати цікаві проекти, за якими ваш Speedbot слідуватиме.
-
Інструкції VEXcode V5 Python, які використовуватимуться в цьому дослідженні:
-
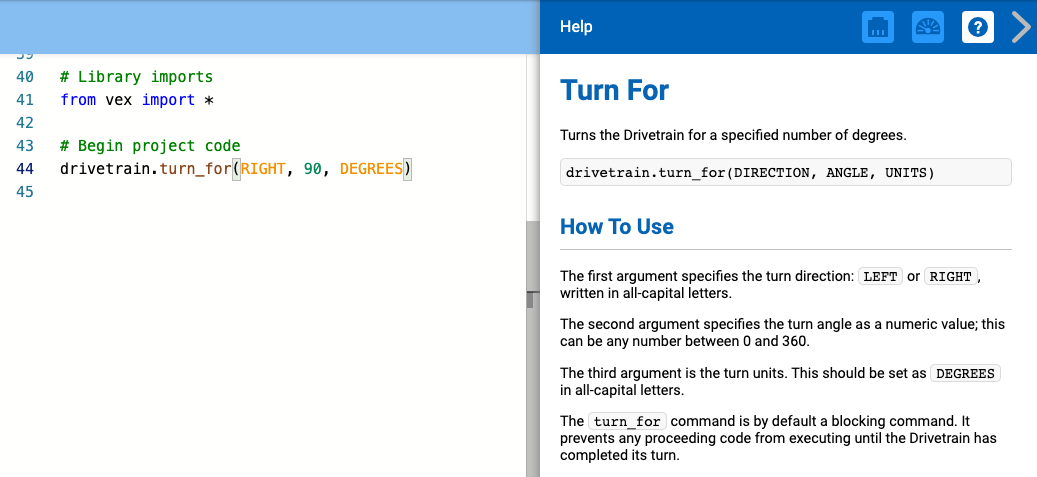
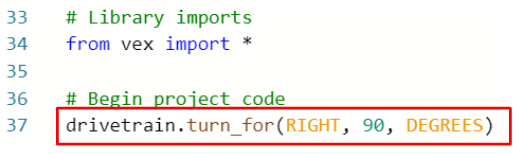
drivetrain.turn_for(ВПРАВО, 90, ГРАДУСІВ)
-
-
Щоб дізнатися більше про інструкцію, виберіть «Довідка», а потім виберіть піктограму зі знаком питання поруч із командою, щоб переглянути додаткову інформацію.
-
Переконайтеся, що у вас є необхідне обладнання, ваш інженерний блокнот і VEXcode V5 завантажено та готове.
| Кількість | Необхідні матеріали |
|---|---|
| 1 |
Робот Speedbot |
| 1 |
Заряджена батарея робота |
| 1 |
VEXcode V5 |
| 1 |
USB-кабель (якщо використовується комп’ютер) |
| 1 |
Інженерний зошит |
Крок 1: Підготовка до дослідження
Перш ніж почати вправу, чи підготували ви кожен із цих елементів?
-
Чи всі двигуни підключено до правильних портів?
-
Чи розумні кабелі повністю вставлено в усі двигуни?
-
Акумулятор заряджений?
Крок 2: Розпочніть новий проект
Виконайте наступні кроки, щоб почати проект:
-
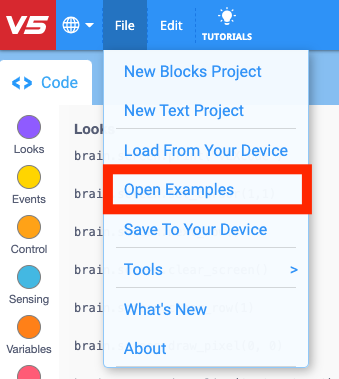
Відкрийте меню «Файл» і виберіть «Відкрити приклади».
-
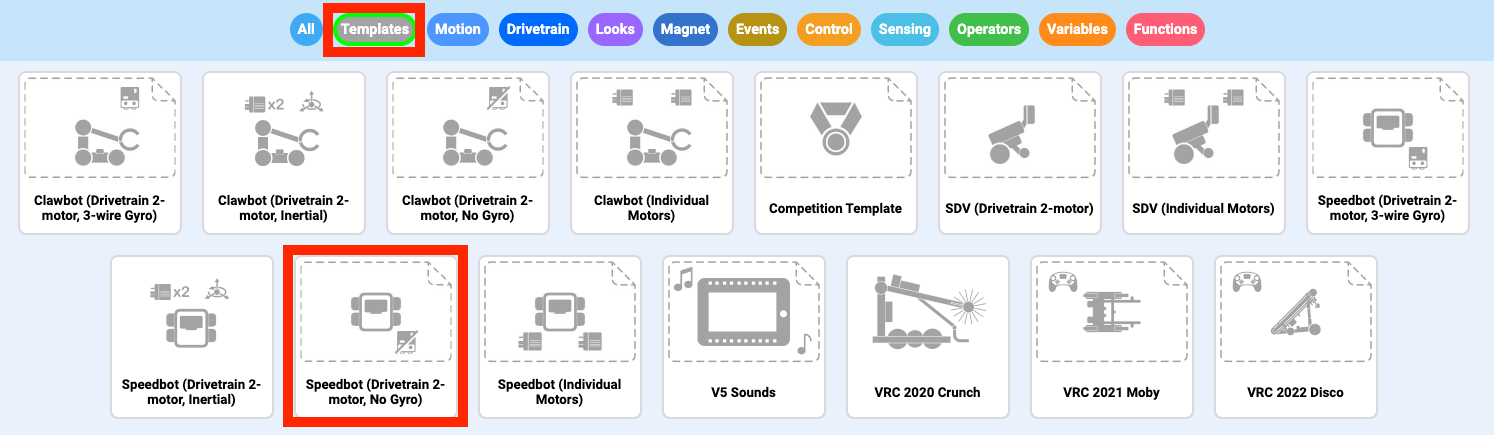
Виберіть і відкрийте проект шаблону Speedbot (Drivetrain 2-motor, No Gyro). Проект шаблону містить конфігурацію двигуна Speedbot . Якщо шаблон не використовується, ваш робот не запустить проект належним чином.
-
Оскільки ви працюватимете над поворотом Speedbot, ви назвете свій проект Turn.

-
Завершивши, виберіть Зберегти.

![]() Поради вчителю
Поради вчителю
У назвах проектів між словами або після них можуть бути пробіли.
Крок 3: Поверніть праворуч
Тепер ви готові почати програмувати робота, щоб повернути праворуч!
-
Додати інструкцію до проекту:
-
Натисніть піктограму слота, щоб вибрати один із восьми доступних слотів у мозку робота, і виберіть слот 1.
-
Підключіть мозок робота V5 до комп’ютера за допомогою кабелю мікро-USB і ввімкніть мозок робота V5. Піктограма «Мозок» на панелі інструментів стає зеленою після успішного підключення.
-
Коли V5 Robot Brain підключено до комп’ютера, піктограма Build змінюється на піктограму Download. Виберіть Завантажити , щоб завантажити проект у Brain.
![]() Інструменти вчителя
Інструменти вчителя
Нагадайте учням від’єднати кабель USB від мозку робота. Підключення робота до комп’ютера під час виконання проекту може призвести до того, що робот потягне за з’єднувальний кабель.
![]() Інструменти вчителя
-
Зупиніться та обговоріть
Інструменти вчителя
-
Зупиніться та обговоріть
Попросіть студентів передбачити, що, на їхню думку, станеться, коли цей проект буде завантажено та запущено на Speedbot. Скажіть учням записати свої передбачення у своїх інженерних зошитах. Якщо дозволяє час, попросіть кожну групу поділитися своїми передбаченнями.
-
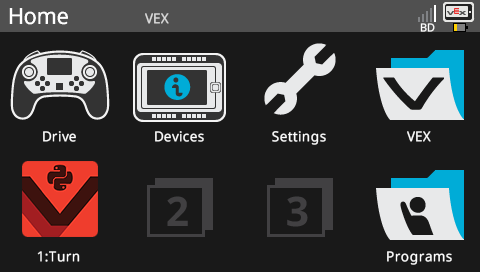
Переконайтеся, що ваш проект має завантажених (Python) , подивившись на екран Robot Brain. Назва проекту Turn повинна бути вказана в слоті 1.
![]() Інструменти вчителя
-
Модель First
Інструменти вчителя
-
Модель First
-
Змоделюйте виконання проекту перед класом, перш ніж спробувати всі учні одночасно. Зберіть учнів в одній зоні та залиште достатньо місця для руху Speedbot, якщо він стоїть на підлозі.
-
Скажіть учням, що тепер їхня черга виконувати свій проект. Переконайтеся, що вони мають вільний шлях і що швидкісні боти не зіткнуться один з одним.
-
Нагадайте учням зберігати свої проекти під час роботи. У цьому розділі (Python) із бібліотеки VEX пояснюється практика збереження у VEXcode V5.
-
Запустіть проект (Python) на роботі Speedbot, переконавшись, що проект вибрано, а потім натисніть кнопку Запустити на мозку робота.
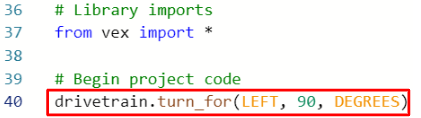
Крок 4: Поверніть ліворуч
Тепер, коли ви запрограмували свого робота повертати праворуч, давайте запрограмуємо його повертати ліворуч.
-
Змініть параметр у інструкції, щоб відображати ВЛІВО замість ВПРАВО.
-
Виберіть назву проекту, щоб змінити її з Turn на TurnLeft.
-
Натисніть піктограму слота, щоб вибрати новий слот. Виберіть слот 2.
-
Завантажте (Python) проект.
-
Перевірте, чи ваш проект завантажено (Python) , подивившись на екран Robot Brain. Назва проекту TurnLeft повинна бути вказана в слоті 2.
-
Запустіть (Python) проект на роботі, переконавшись, що проект вибрано, а потім натисніть кнопку Запустити .
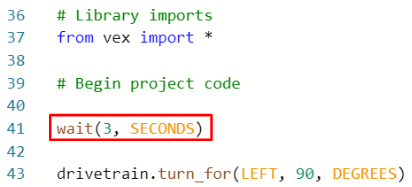
Крок 5: Зачекайте, а потім поверніть ліворуч
Тепер, коли ми запрограмували робота повертати ліворуч праворуч, а потім повертати ліворуч, тепер ми можемо додати інструкцію зачекайте , щоб робот чекав певний час перед поворотом ліворуч.
-
Додайте інструкцію зачекайте , як показано. Це означає, що робот повинен зачекати три секунди, перш ніж повернути ліворуч.
-
Виберіть назву проекту, щоб змінити її з TurnLeft на WaitLeft.
-
Натисніть піктограму слота, щоб вибрати новий слот. Виберіть слот 3.
-
Завантажте (Python) проект.
-
Перевірте, чи ваш проект завантажено (Python) , подивившись на екран Robot Brain. Назва проекту WaitLeft повинна бути вказана в слоті 3.
-
Запустіть (Python) проект на роботі, переконавшись, що проект вибрано, а потім натисніть кнопку Запустити .
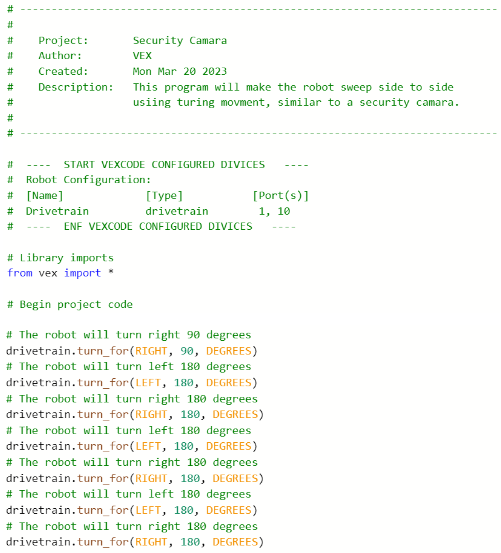
Крок 6: Виконайте завдання камери відеоспостереження!


У конкурсі Security Camera Challenge робот повинен почати з повороту праворуч на 90 градусів. Потім робот повернеться ліворуч на 180 градусів, потім праворуч на 180 градусів, «скануючи» так само, як камера безпеки. Потім робот повторить поворот на 180 градусів ліворуч і на 180 градусів праворуч ще двічі. Таким чином, робот сканує на 180 градусів три рази.
Перш ніж програмувати робота, сплануйте шлях і поведінку робота у своєму інженерному блокноті.
Після завершення виклику камери безпеки ви зможете поєднувати рухи вперед і назад із додатковими поведінками роботів, щоб виконувати ще складніші завдання.
![]() Teacher Toolbox
-
Solution
Teacher Toolbox
-
Solution
Перегляньте зразок рішення нижче: