
Lección 3: Uso de la retroalimentación del sensor reportada para recoger discos
Esta Lección utilizará los comentarios de los sensores informados para resolver el mismo desafío que la Lección 2. El robot VR recogerá y moverá el primer disco azul a la portería azul.
-
Inicie un nuevo proyecto en VEXcode VR y nombre el proyecto Unit8Lesson3.

-
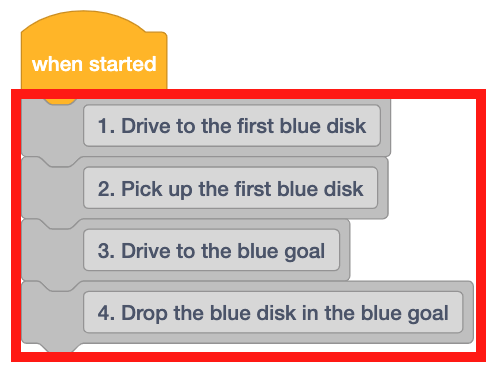
Arrastre cuatro bloques de comentarios al espacio de trabajo. Añade comentarios para cada uno de los pasos necesarios para que el robot VR se dirija al primer disco, lo recoja y lo devuelva al objetivo azul.
-
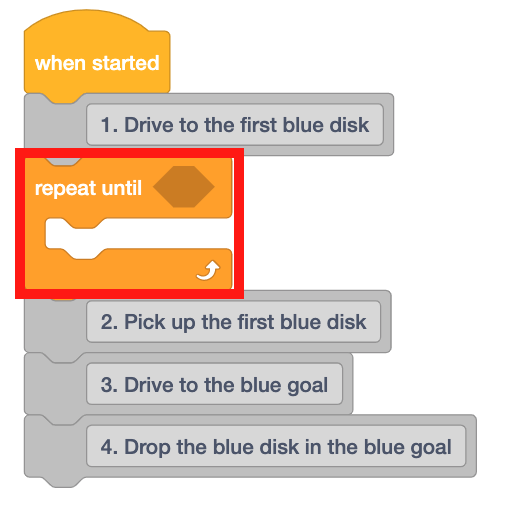
Arrastra un bloque [Repeat until] al espacio de trabajo debajo del primer comentario.
Para su información
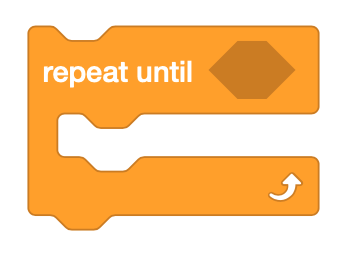
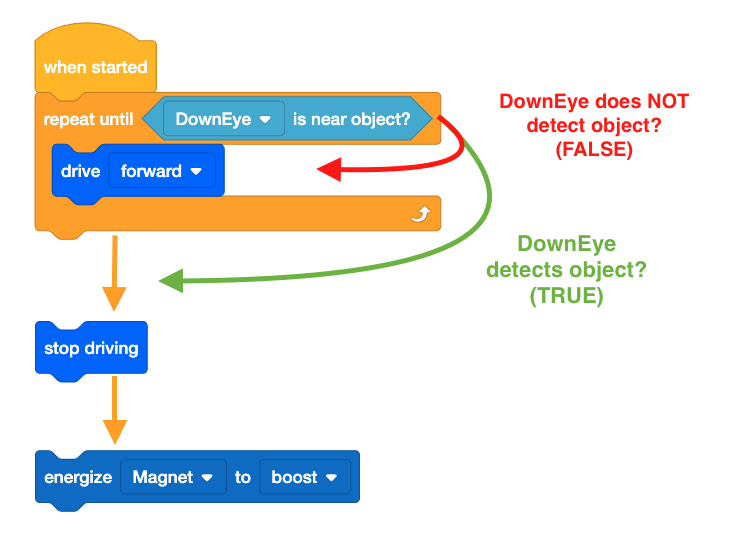
El bloque [Repeat until] es un bloque C que acepta bloques informadores booleanos. El bloque [Repeat until] solo comprobará la condición booleana al comienzo de cada bucle. Si la condición booleana se informa como FALSA, los bloques en el interior se ejecutarán. Si la condición booleana se informa como VERDADERA, se omitirán los bloques en el interior.
-
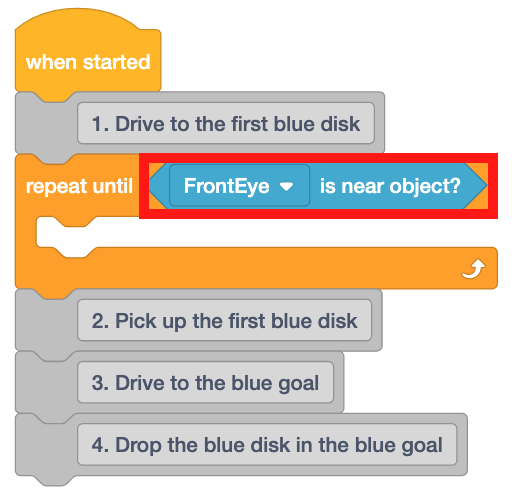
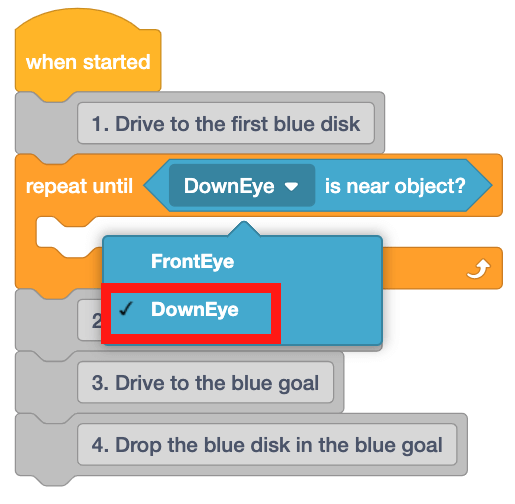
El <Eye Sensor near object> bloque informa TRUE cuando el VR Robot detecta un disco de color en el Disk Mover Playground. Arrastra este bloque al proyecto.
-
Los discos del parque infantil Disk Mover están en el suelo del parque infantil y no pueden ser detectados por el sensor del ojo delantero. Por esta razón, establezca el <Eye Sensor near object> bloque en ‘DownEye’.
-
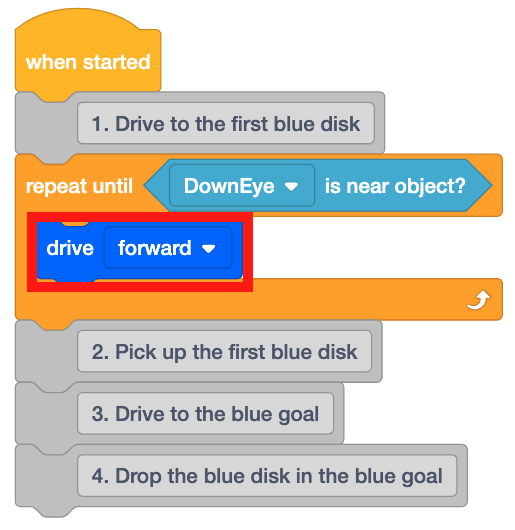
Los bloques en el interior del bloque [Repetir hasta] se ejecutarán cuando el robot VR NO detecte un objeto. Para llegar a uno de los discos, el robot VR deberá avanzar hasta que se detecte el disco.

-
Arrastra un bloque [Drive] al bloque [Repeat until].
-
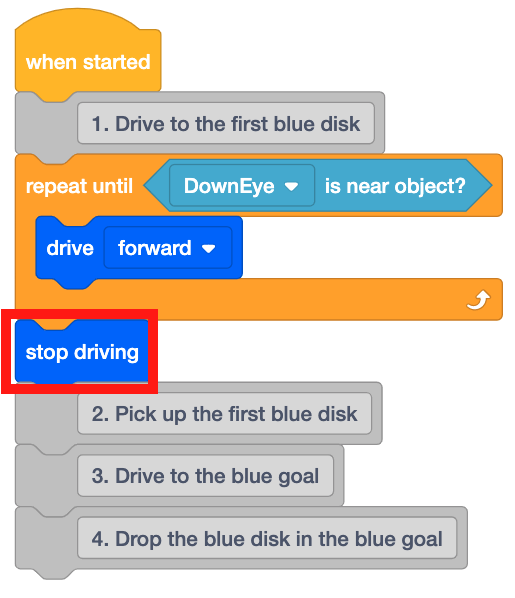
Cuando se detecta un disco, el robot VR tendrá que dejar de conducir para recogerlo. Arrastre un bloque [Stop driving] y colóquelo debajo del bloque [Repeat until].
-
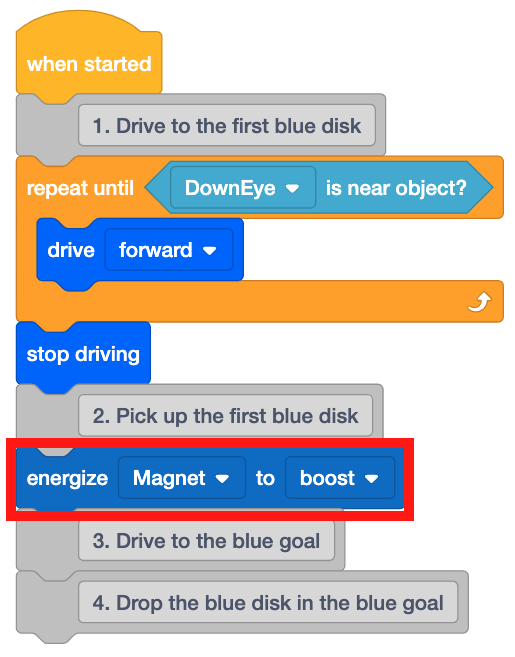
Ahora, indique al robot de realidad virtual que recoja el disco con el electroimán colocando un bloque [Energize Electromagnet] debajo del segundo comentario.
- Abra Disk Mover Playground si aún no está abierto y ejecute el proyecto.
-
El robot VR avanza hasta que el sensor Down Eye detecta el primer disco azul, deja de funcionar y energiza el electroimán para recoger el disco.

- Observa cómo funciona el bloque [Repetir hasta] en este proyecto.
- Una vez que el sensor Down Eye en el robot VR detecta un objeto, el proyecto se mueve al siguiente bloque en la pila debajo del bloque [Repetir hasta].
- En este proyecto, eso significó que el robot de realidad virtual dejó de conducir y energizó el electroimán.
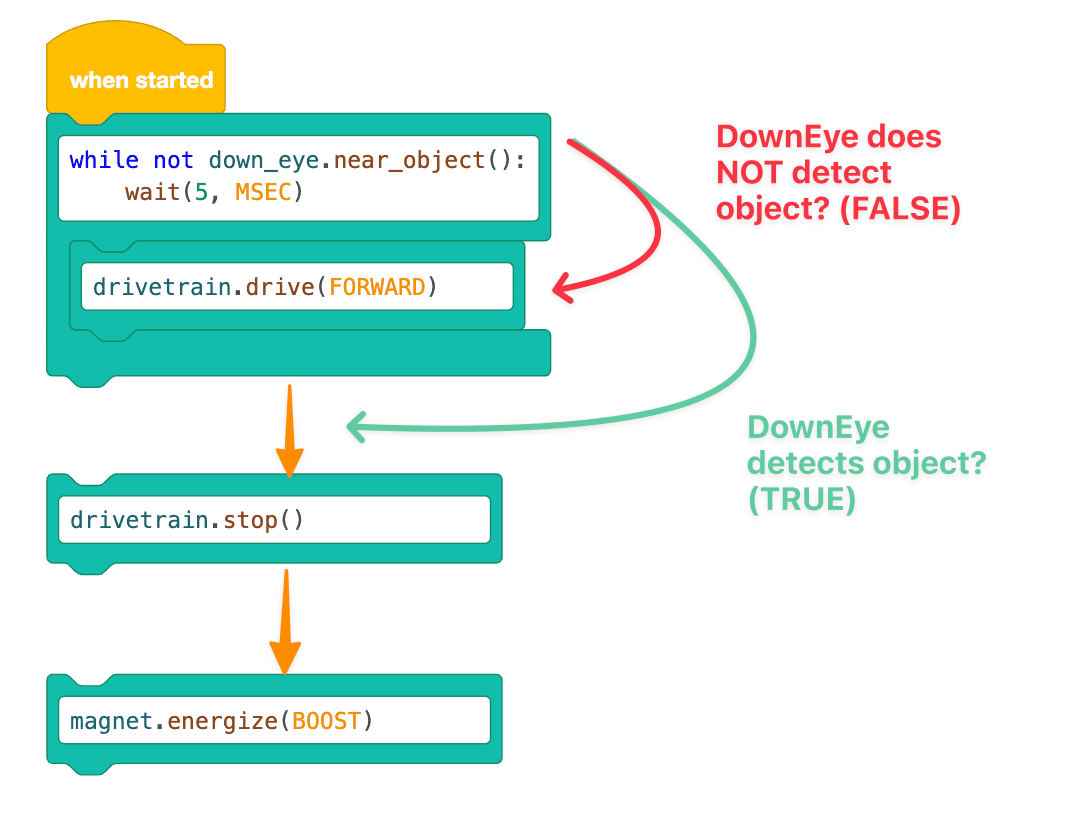
Uso de bloques de interruptores
La imagen a continuación muestra el gráfico de flujo de trabajo de esta lección utilizando los bloques de Switch. Comparar este gráfico con el anterior puede ayudarte a comprender mejor el flujo de trabajo de los nuevos comandos de Switch Python que estás aprendiendo.
Seleccione el botón Siguiente para continuar con el resto de esta lección.