
Crasheur de château
6 Cours
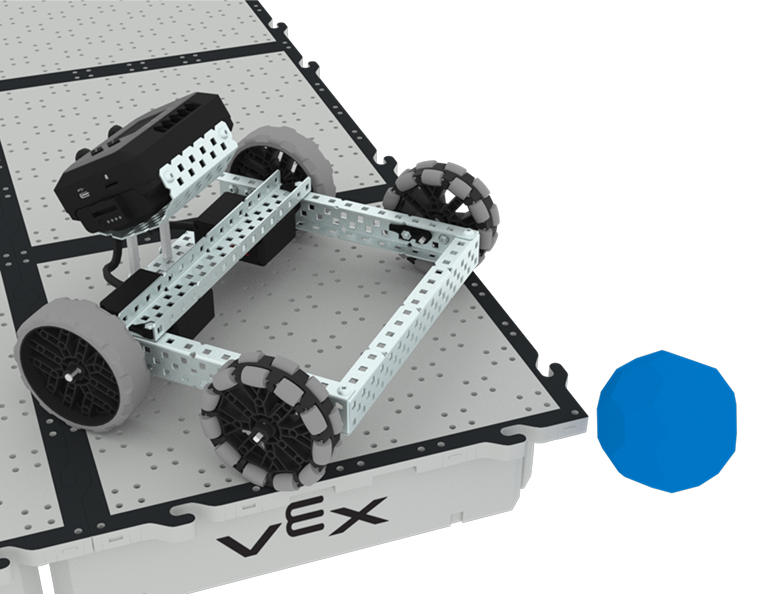
Dans cette unité, vous découvrirez comment utiliser les capteurs optiques et de distance pour rechercher, écraser et nettoyer les « châteaux » de Buckyball afin de marquer des points dans la compétition Castle Crasher !
Visitez le portail des enseignants pour accéder au matériel de soutien aux enseignants et aux vidéos sur le contenu et l'animation des leçons Castle Crasher.
Leçon 1 : Introduction
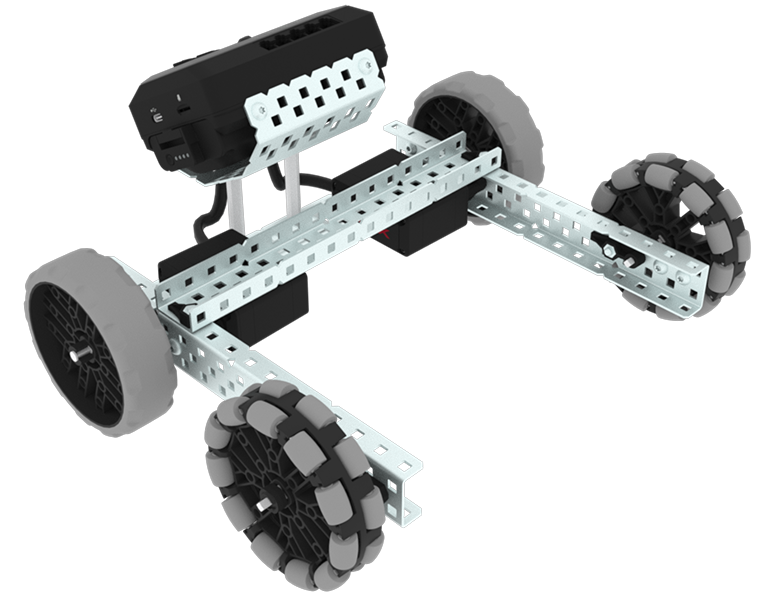
Dans cette leçon, vous découvrirez le concours Castle Crasher, construisez le BaseBot et préparez-vous à coder.
Leçon 2 : Casse-tête de château sans capteurs
Dans cette leçon, vous apprendrez à calculer les angles et à modifier la vitesse de votre robot afin de pouvoir participer au défi Buckyball Blitz.
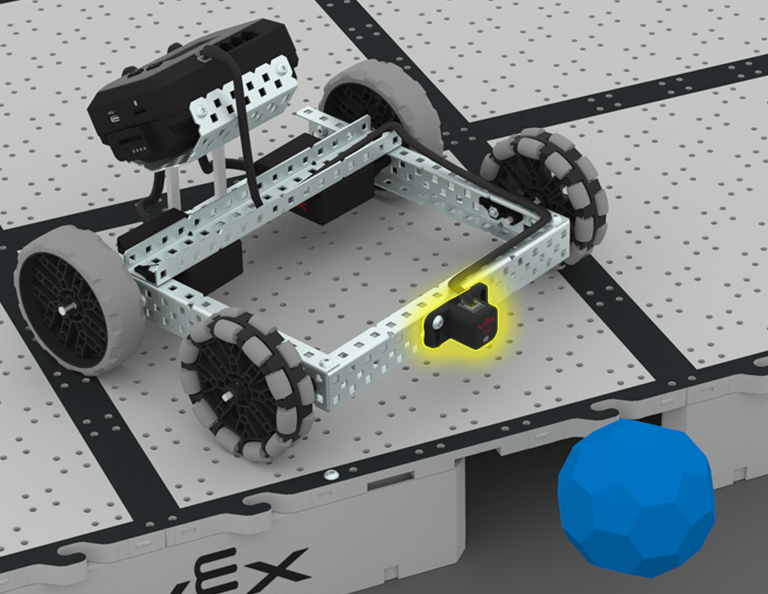
Leçon 3 : Crasher de château + capteur de distance
Dans cette leçon, vous apprendrez ce qu'est le capteur de distance et comment il peut être utilisé sur votre robot. Vous découvrirez également le bloc [Attendre] et comment il peut être utilisé dans un projet EXP VEXcode. Ensuite, vous appliquerez ce que vous avez appris à participer au défi Sens et balayage !
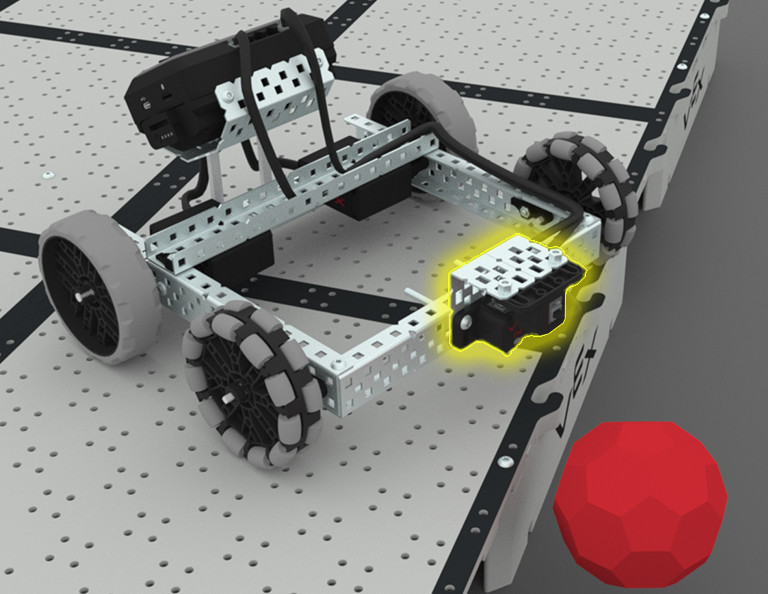
Leçon 4 : Création d'algorithmes
Dans cette leçon, vous en apprendrez plus sur le capteur optique et sur la façon de créer un algorithme qui utilise les commentaires du capteur. Ensuite, vous allez coder votre robot pour trouver de manière autonome des Buckyballs et les pousser hors du terrain dans le Défi Balayer le terrain.
Leçon 5 : Concours Castle Crasher
Dans cette leçon, vous appliquerez les enseignements des leçons précédentes pour participer à une compétition Castle Crasher !

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.