
Introduction
Dans cette leçon, vous en apprendrez plus sur le capteur optique et sur la façon dont vous pouvez utiliser les commentaires du capteur pour optimiser votre stratégie et votre code pour jouer à Castle Crasher. Vous apprendrez également à créer un algorithme pour coder votre robot afin de trouver de manière autonome des Buckyballs et de terminer le défi Balayer le champ. Regardez l'animation ci-dessous pour voir un exemple de la façon dont le robot pourrait se déplacer pour détecter et éliminer les Buckyballs du terrain sans tomber du bord.
Ajouter un capteur optique
Dans cette leçon, vous en apprendrez plus sur le capteur optique et explorerez comment l'utiliser avec le capteur de distance pour créer un algorithme.
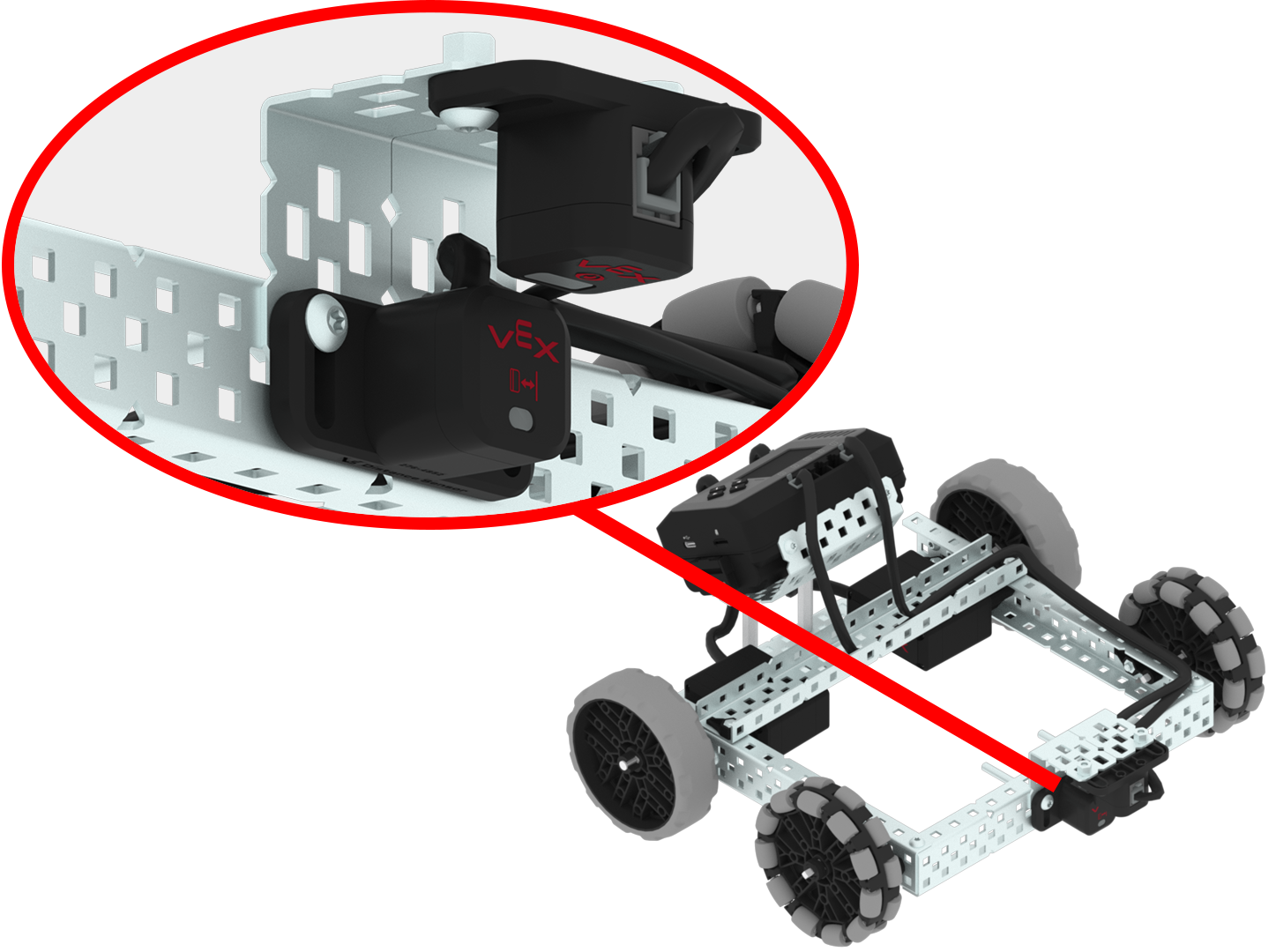
Ajoutez les capteurs optiques et de distance à votre BaseBot comme indiqué dans cette image.
- Ajoutez un canal en C 1x2x1x16 à l'avant du BaseBot, comme indiqué.
- Ensuite, montez le capteur de distance sur le canal C orienté vers l'extérieur, comme indiqué sur l'image.
- Ajoutez le capteur optique pointant vers le bas.
- Le capteur de distance doit être branché sur le port 5 et le capteur optique sur le port 1.
Sélectionnez < Retour aux leçons pour revenir à l'aperçu de la leçon.
Sélectionnez Suivant > pour en savoir plus sur le capteur optique et sur la façon dont vous pouvez utiliser les commentaires et les algorithmes du capteur pour coder votre robot afin de trouver et de pousser les Buckyballs hors d'un champ.