
Introduction
Dans cette leçon, vous en apprendrez plus sur le capteur optique et sur la façon dont il peut être utilisé avec les blocs [If then] et [Repeat] dans un projet pour que votre Clawbot récupère un Buckyball en fonction de sa couleur. Ensuite, vous appliquerez ce que vous avez appris à participer au Treasure Mover Challenge, où votre robot n'aura besoin de collecter que le bouc au trésor rouge. Regardez l'animation ci-dessous pour voir un exemple de la façon dont un robot pourrait se déplacer de manière autonome lors d'une course réussie dans le Treasure Mover Challenge.
Ajouter un capteur optique
Dans cette leçon, vous en apprendrez plus sur la rétroaction des capteurs et sur la façon dont vous pouvez coder votre robot en utilisant cette rétroaction.
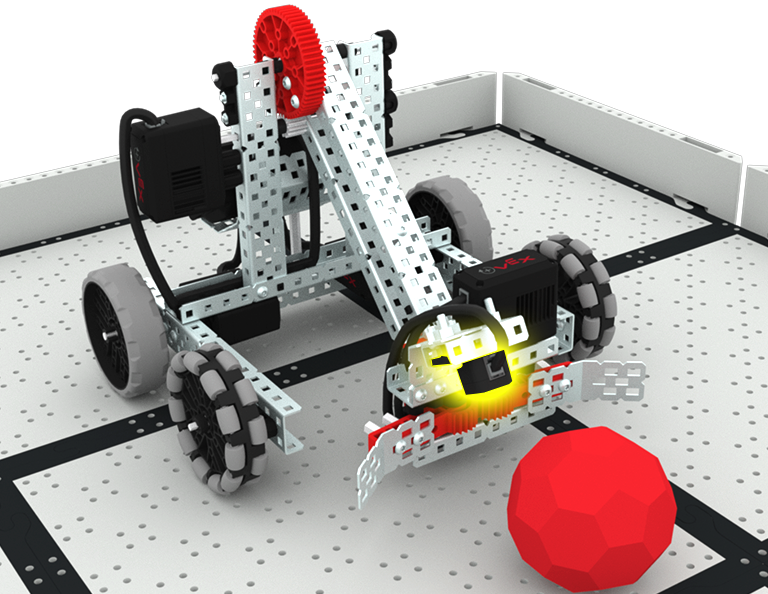
Ajoutez un capteur optique à votre Clawbot comme indiqué dans cette image.
- Connectez un canal C 1x2x1x4 à un capteur optique.
- Montez le profilé en C sur un soufflet incliné, puis fixez-le à la griffe.
Sélectionnez Suivant > pour en savoir plus sur le capteur optique et les blocs que vous pouvez utiliser pour créer un projet de collecte d'un buckyball rouge.