
Leçon 3 : Utilisation de la rétroaction des capteurs signalée pour ramasser des disques
Cette leçon utilisera les commentaires des capteurs pour résoudre le même défi que la leçon 2. Le robot VR va ramasser et déplacer le premier disque bleu dans le but bleu.
-
Lancez un nouveau projet dans VEXcode VR et nommez le projet Unit8Lesson3.

-
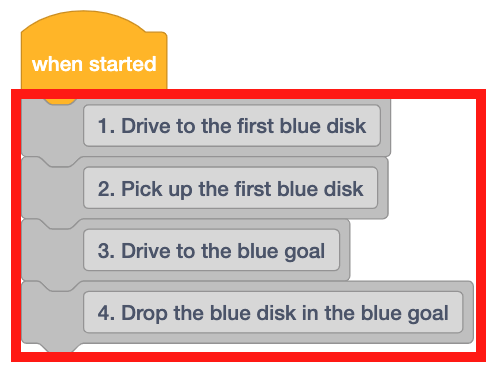
Faites glisser quatre blocs de commentaires dans l'espace de travail. Ajoutez des commentaires pour chacune des étapes nécessaires pour que le robot VR se dirige vers le premier disque, le ramasse et le renvoie à l'objectif bleu.
-
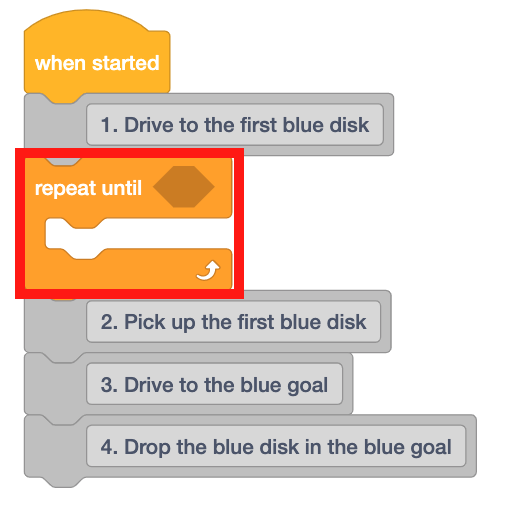
Faites glisser un bloc [Répéter jusqu'à] dans l'espace de travail sous le premier commentaire.
Pour votre information
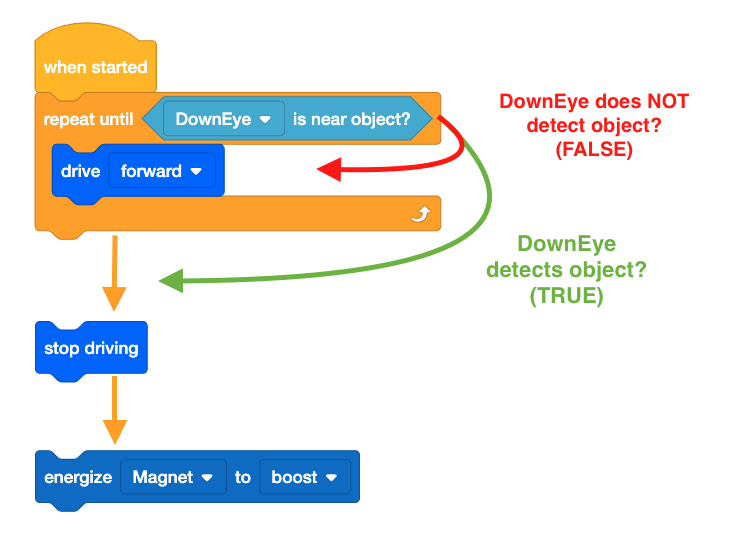
Le bloc [Répéter jusqu'à] est un bloc C qui accepte les blocs rapporteurs booléens. Le bloc [Répéter jusqu'au] vérifie uniquement la condition booléenne au début de chaque boucle. Si la condition booléenne est signalée comme FAUSSE, les blocs à l'intérieur s'exécuteront. Si la condition booléenne est signalée comme VRAIE, les blocs à l'intérieur seront ignorés.
-
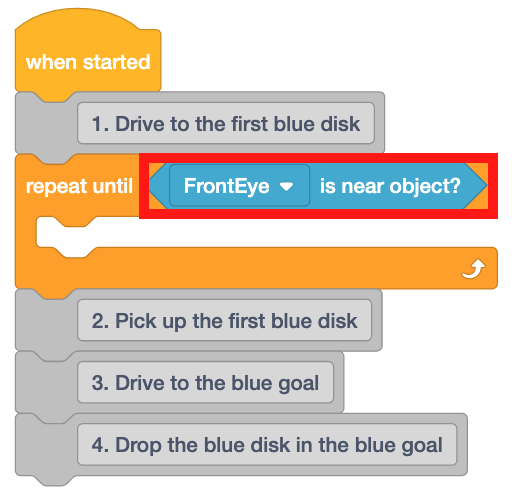
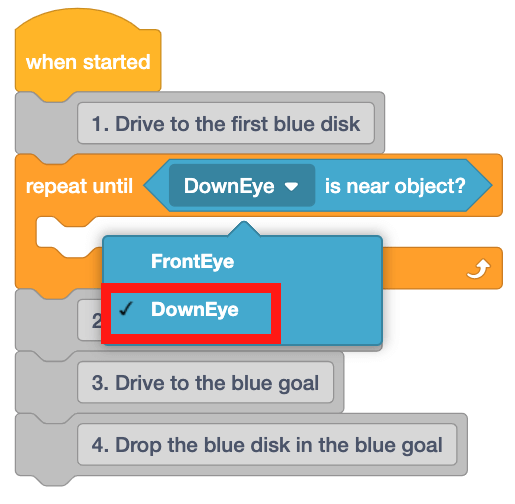
Le <Eye Sensor near object> bloc indique VRAI lorsque le robot VR détecte un disque coloré sur le terrain de jeu Disk Mover. Faites glisser ce bloc dans le projet.
-
Les disques de l'aire de jeu Disk Mover se trouvent sur le sol de l'aire de jeu et ne peuvent pas être détectés par le capteur oculaire avant. Pour cette raison, définissez le <Eye Sensor near object> bloc sur « DownEye ».
-
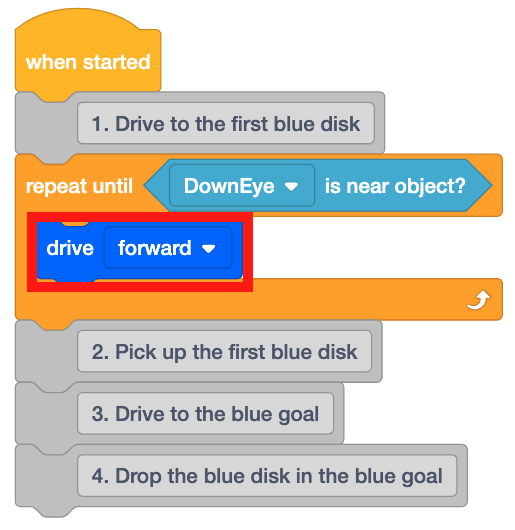
Les blocs à l'intérieur du bloc [Répéter jusqu'à] s'exécutent lorsque le robot VR ne détecte PAS d'objet. Pour atteindre l'un des disques, le robot VR devra avancer jusqu'à ce que le disque soit détecté.

-
Faites glisser un bloc [Drive] dans le bloc [Repeat until].
-
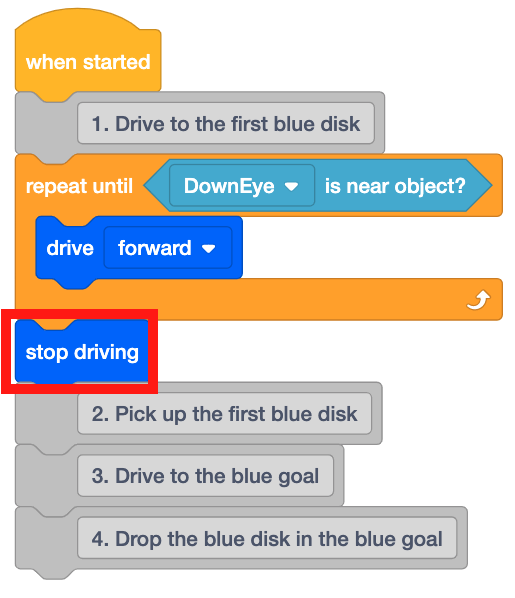
Lorsqu'un disque est détecté, le robot VR devra arrêter de conduire pour pouvoir le ramasser. Faites glisser un bloc [Arrêter de conduire] et placez-le sous le bloc [Répéter jusqu'à].
-
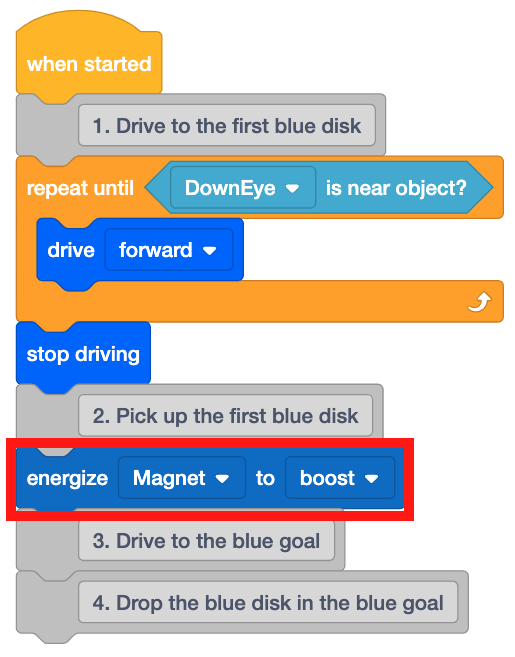
Maintenant, demandez au robot VR de prendre le disque avec l'électro-aimant en plaçant un bloc [Énergiser l'électro-aimant] sous le deuxième commentaire.
- Ouvrez le Disk Mover Playground s'il n'est pas déjà ouvert et exécutez le projet.
-
Le robot VR avance jusqu'à ce que le premier disque bleu soit détecté par le capteur Down Eye, arrête de conduire et active l'électroaimant pour saisir le disque.

- Remarquez comment le bloc [Répéter jusqu'au] fonctionne dans ce projet.
- Une fois que le capteur Down Eye du robot VR détecte un objet, le projet passe au bloc suivant dans la pile en dessous du bloc [Répéter jusqu'à].
- Dans ce projet, cela signifiait que le robot VR arrêtait de conduire et activait l'électroaimant.
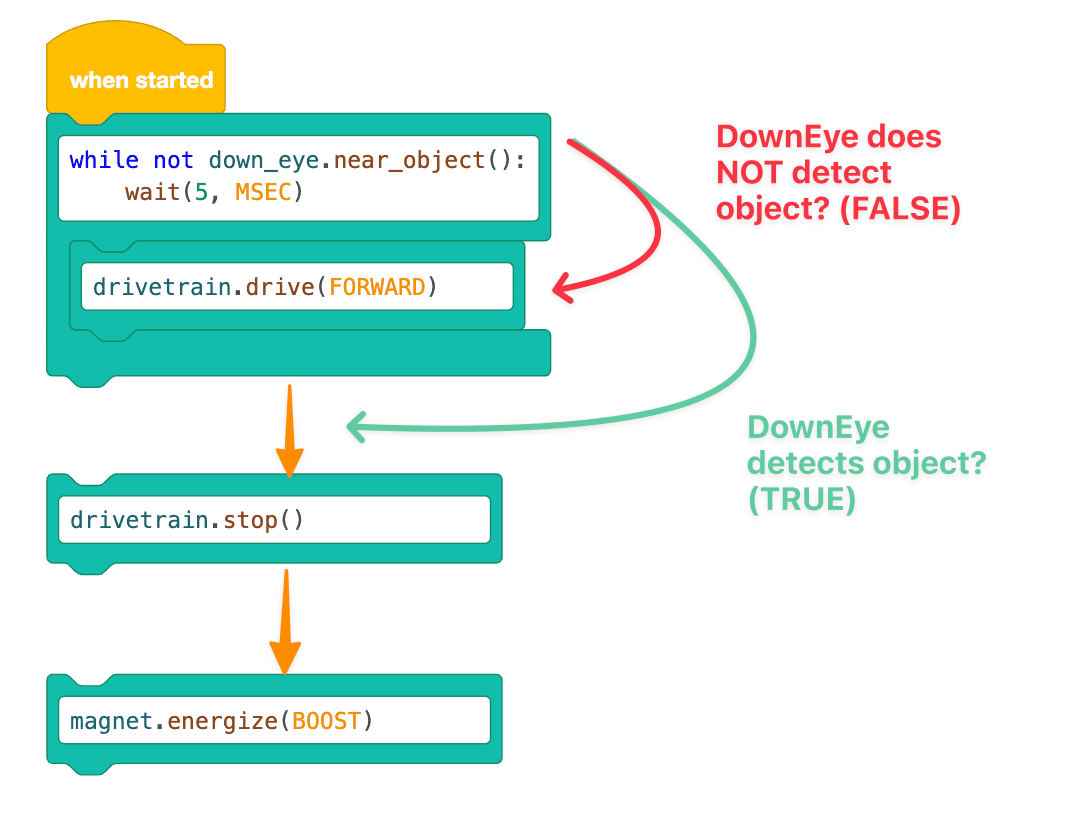
Utilisation des blocs de commutation
L'image ci-dessous affiche le graphique du flux de travail de cette leçon à l'aide de blocs de commutation. La comparaison de ce graphique avec le graphique ci-dessus peut vous aider à mieux comprendre le flux de travail des nouvelles commandes Switch Python que vous apprenez.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.