
Leçon 3 : Utilisation de la rétroaction des capteurs signalée pour placer les disques dans l'objectif
Dans la leçon 2, le robot VR a fait marche arrière jusqu'au point de départ pour déposer le disque. Cela nécessitait que l'utilisateur calcule la distance exacte à parcourir par le robot VR. Cela n'est pas toujours possible. Au lieu de cela, le robot VR peut utiliser les valeurs de capteur signalées pour ramasser et déposer des disques avec une précision constante.
La leçon 3 utilise les commentaires des capteurs pour déterminer où le robot VR doit arrêter de conduire lors du retour à l'objectif. En utilisant le <Eye Sensor near object> bloc plus tôt dans cette leçon, il n'est pas nécessaire de connaître la distance entre l'objectif et chaque disque.

Le robot VR retournera vers l'objectif bleu en utilisant les données du capteur de distance pour déterminer où arrêter la conduite. Une fois que le robot VR s'est arrêté à l'intérieur de l'objectif bleu, le robot VR laissera tomber le disque bleu.
- Continuez à travailler sur le projet Unit8Lesson3.
- Le capteur de distance mesure la distance entre l'avant du robot VR et l'objet le plus proche. Pour cette raison, le robot VR devra tourner autour de 180 degrés avant de revenir vers l'objectif bleu.
- Le robot VR utilisera le capteur de distance avec la paroi arrière de l'aire de jeux afin de déterminer où déposer le disque. Pour cette raison, le robot VR devra tourner autour de 180 degrés avant de revenir vers l'objectif bleu.
-
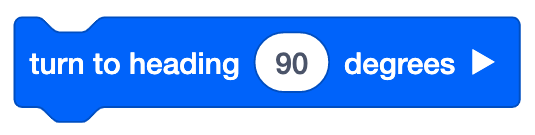
Le bloc [Tourner au cap] peut être utilisé pour s'assurer que le robot VR tourne au bon cap.
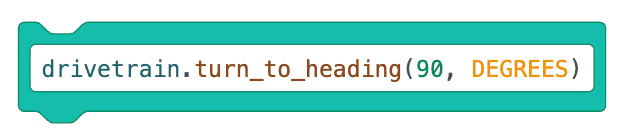
Utilisation des blocs de commutation
C'est le bloc Switch [turn to heading]. Vous pouvez modifier le degré du virage en modifiant la valeur numérique entre parenthèses. N'oubliez pas que le nombre doit être écrit avant l'unité de mesure (DEGRÉS), séparé par une virgule.
Pour votre information
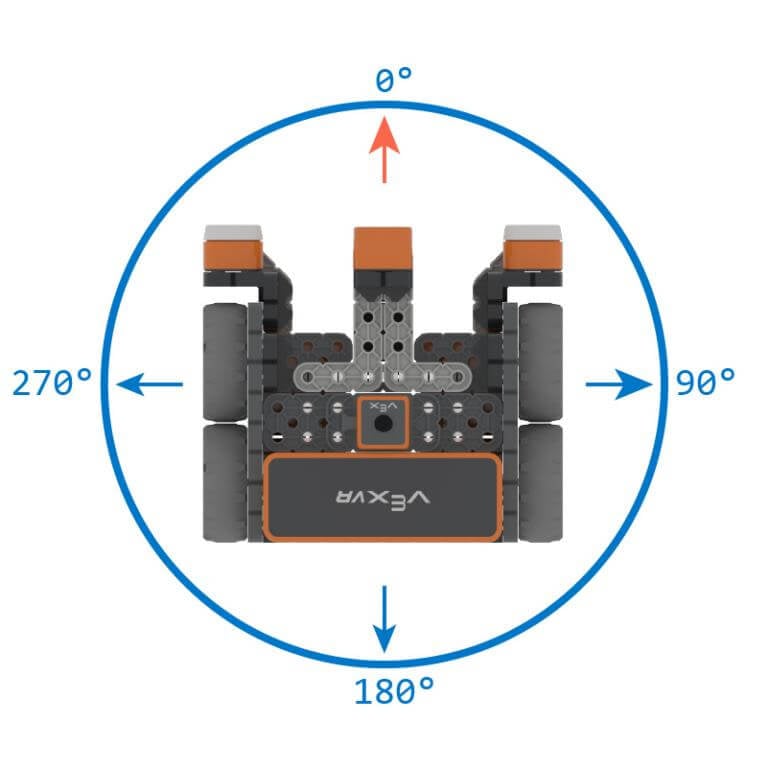
Le bloc [Tourner en cap] transforme le robot VR en un cap spécifique à l'aide du capteur gyroscopique. La direction dans laquelle le robot VR va tourner (à gauche ou à droite) est déterminée en fonction du cap actuel du capteur Gyro. Le bloc [Tourner vers le cap] est utilisé pour diriger le robot VR vers un cap spécifique, quelle que soit la position du robot VR. Lorsque vous prenez ou déposez un disque, le robot VR peut déraper. L'utilisation du bloc [Tourner au cap] garantit que le robot VR se tournera vers la position absolue plutôt que vers une position par rapport au cap précédent.
-
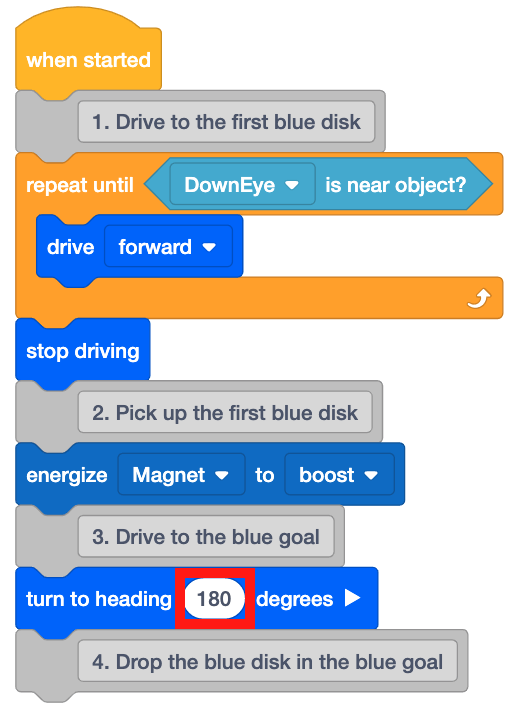
Ajoutez un bloc [Tourner vers le titre] sous le troisième commentaire.

-
Réglez le bloc [Tourner en cap] à 180 degrés.
-
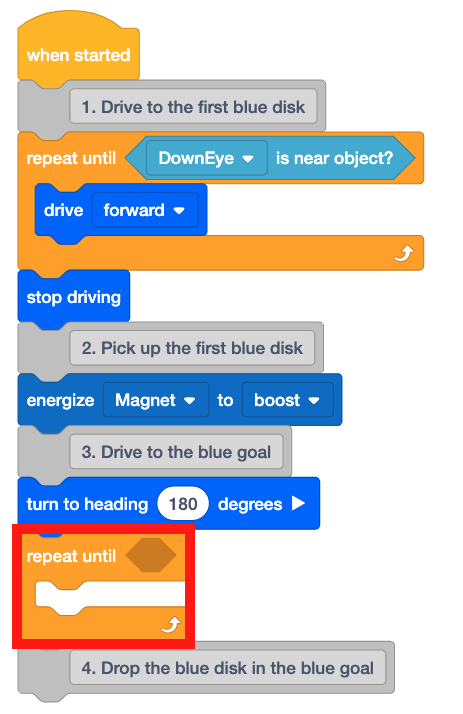
Maintenant que le robot VR est orienté vers la position de départ, le robot VR devra revenir à l'objectif bleu. Ajoutez un bloc [Repeat until] sous le bloc [Turn to heading].
-
Pour revenir à l'objectif bleu, le robot VR utilisera les données du capteur de distance pour déterminer quand le robot VR se trouve à l'intérieur de l'objectif bleu. Comme indiqué dans la leçon précédente, chaque carré de grille sur le terrain de jeu du déplaceur de disque mesure 200 millimètres (mm) par 200 millimètres (mm).

-
À l'aide de ces mesures, le centre de l'objectif bleu peut être déterminé à environ 200 millimètres (mm) du mur de l'aire de jeux.

-
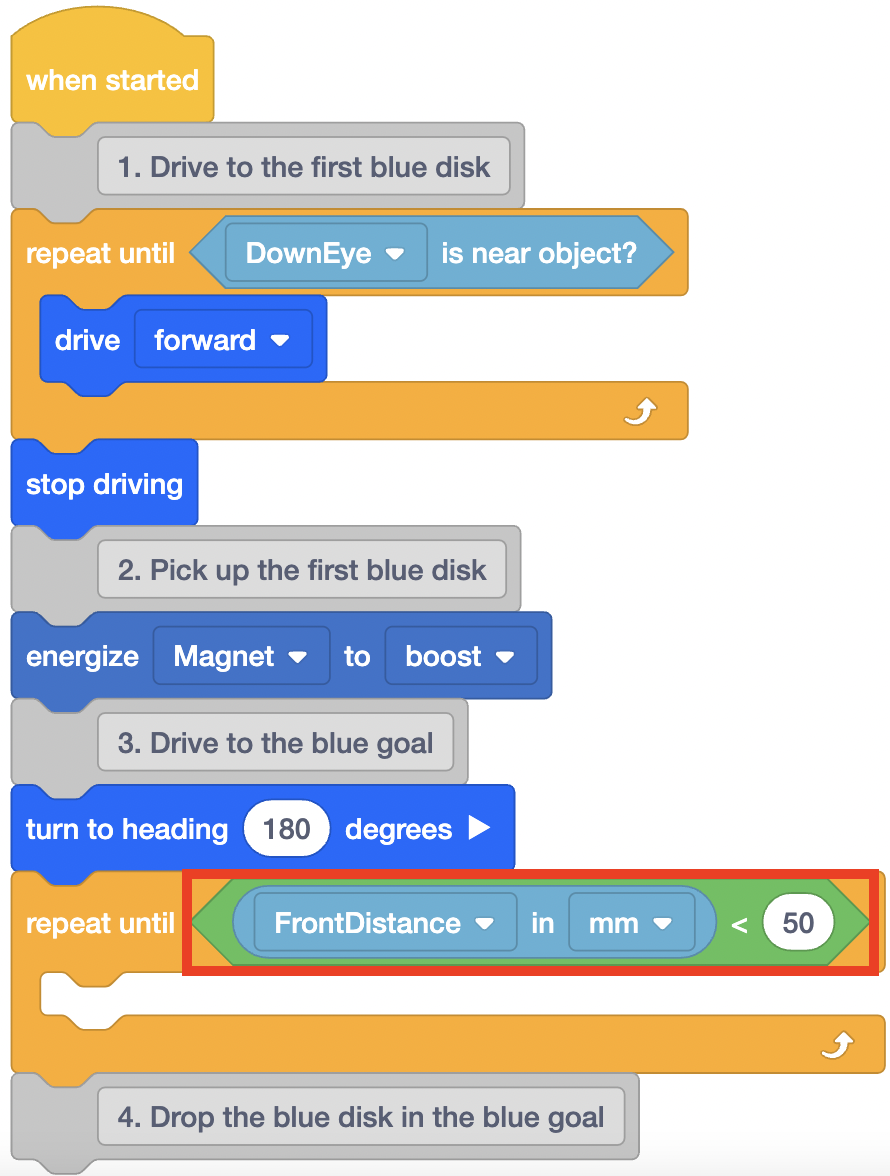
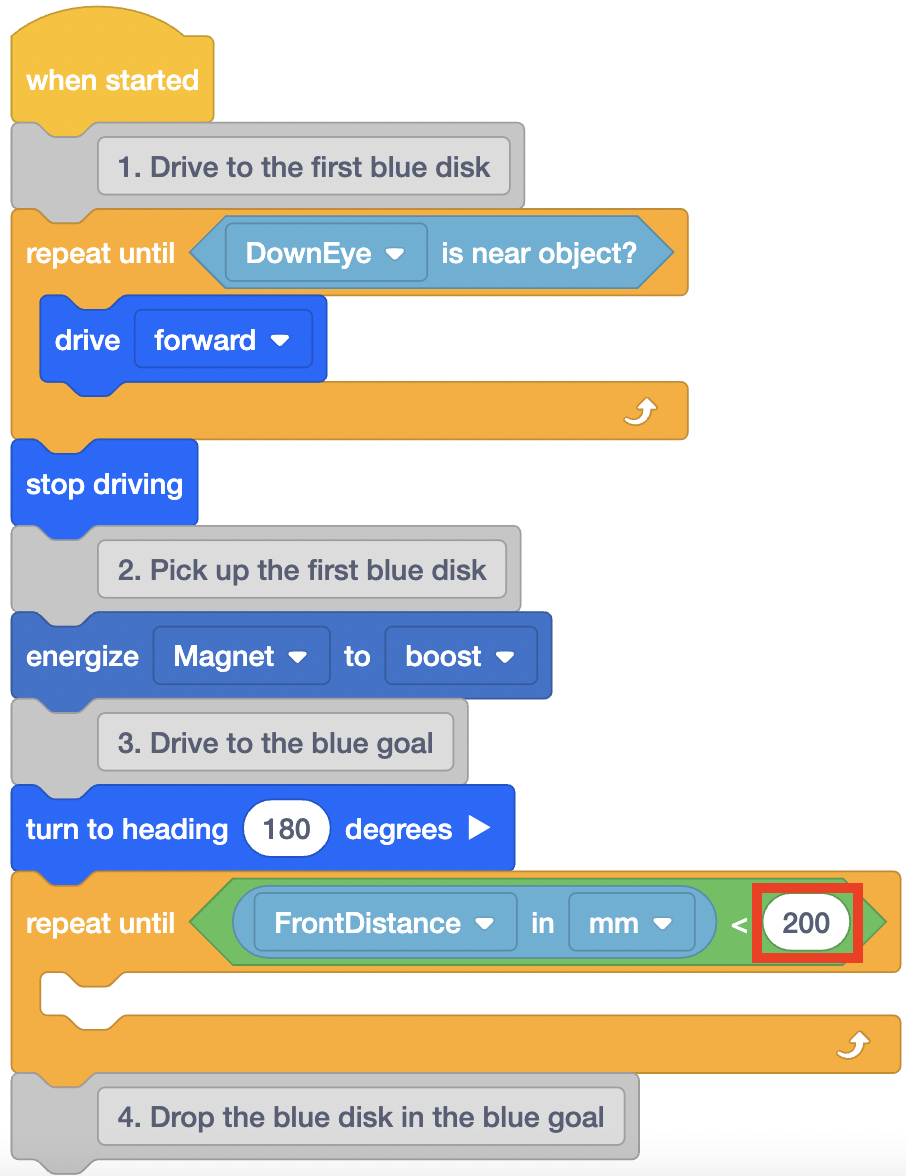
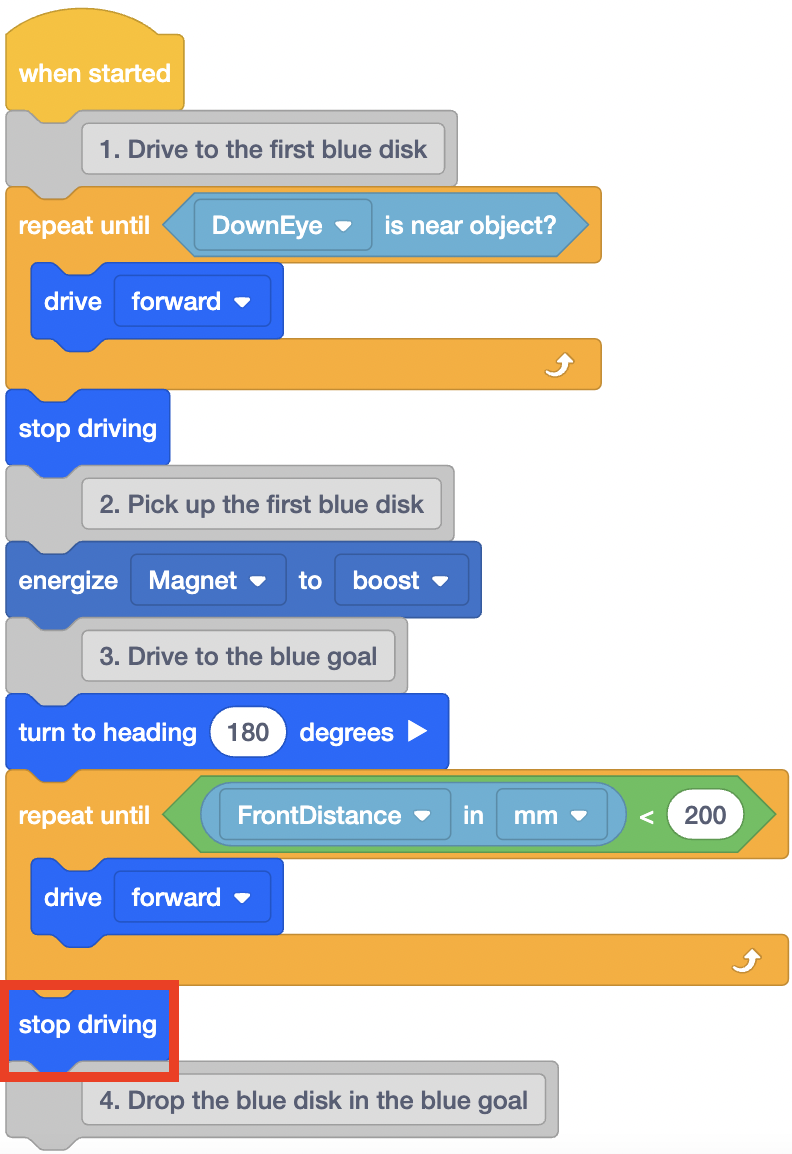
Le robot VR doit arrêter de conduire lorsque le capteur de distance signale que le robot VR se trouve à moins de 200 millimètres (mm) du mur de l'aire de jeu. Ajoutez les blocs suivants au bloc [Répéter jusqu'au].
-
Modifiez le paramètre dans le <Less than> bloc à 200.
-
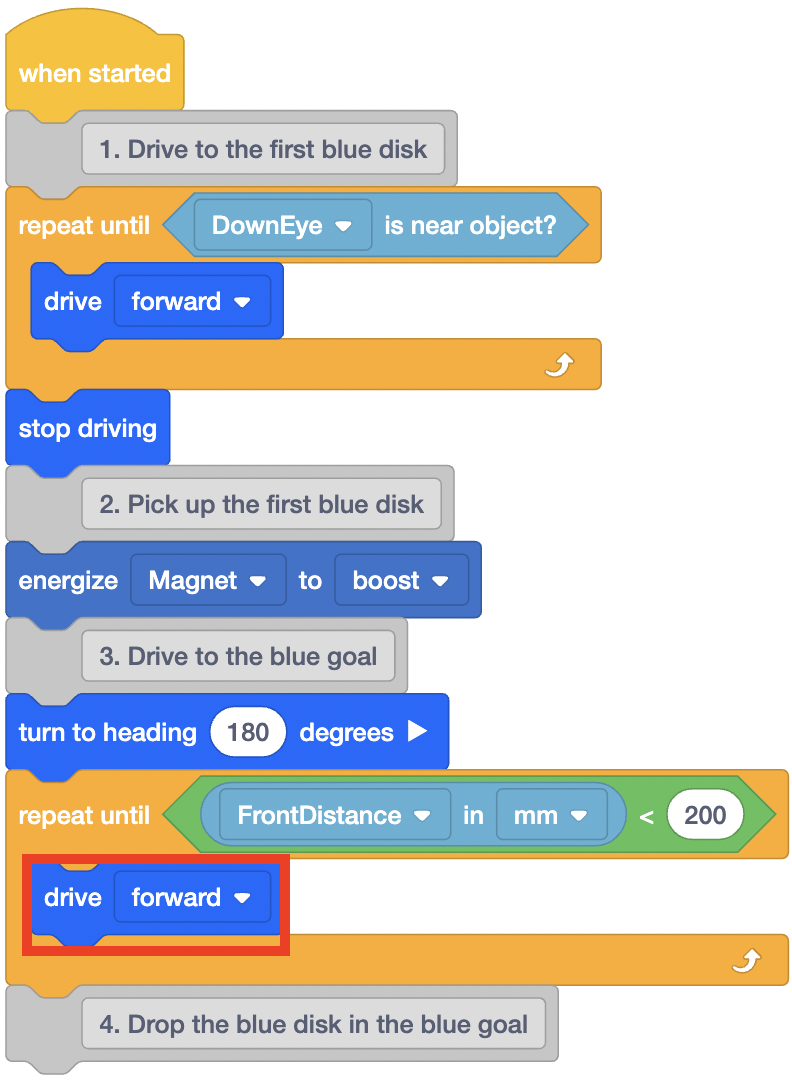
Ajoutez un bloc [Drive] dans ce bloc [Repeat until]. Cela demandera au robot VR de rouler vers l'avant jusqu'à ce que le capteur de distance signale une distance inférieure à 200 millimètres (mm).
-
Une fois que le robot VR a atteint l'objectif bleu (200 mm du mur), le robot VR devra arrêter de conduire. Ajoutez un bloc [Arrêter de conduire] sous le bloc [Répéter jusqu'à].
-
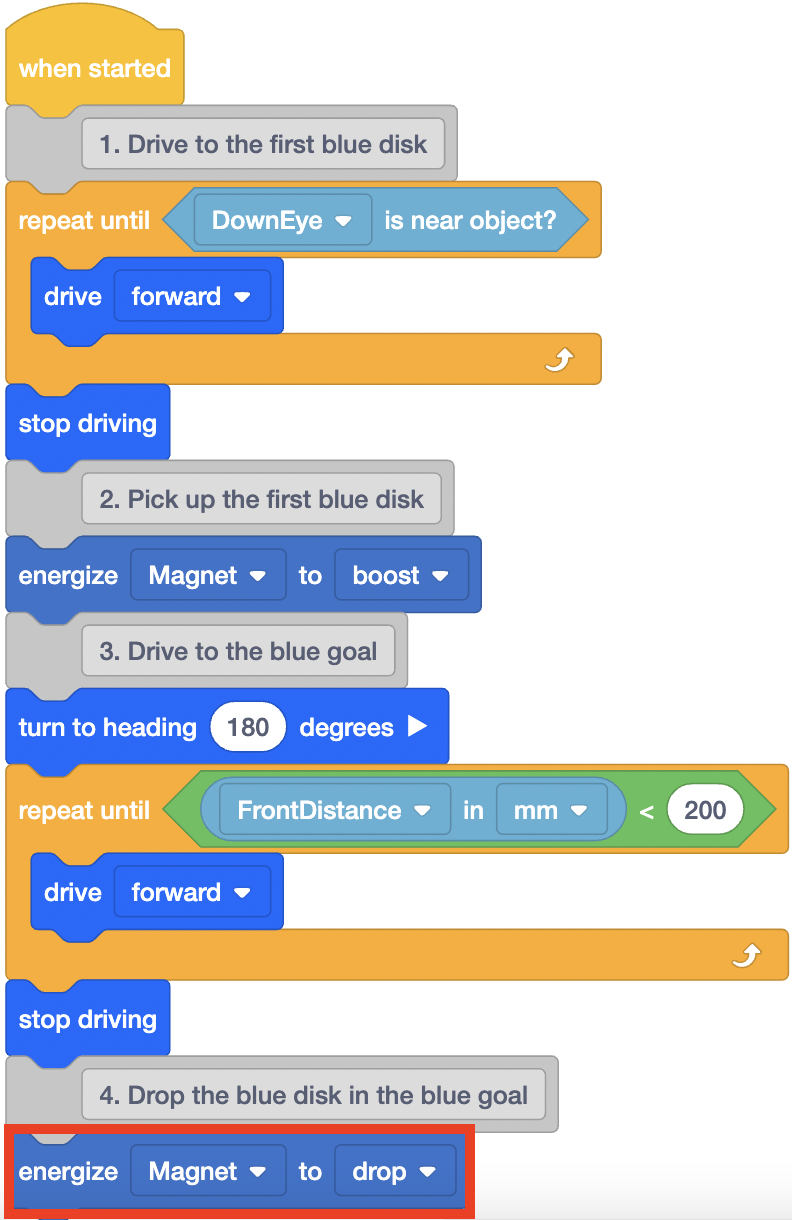
Maintenant que le robot VR est arrêté dans l'objectif bleu, il peut laisser tomber le disque. Ajoutez un bloc [Energize Electromagnet] sous le quatrième commentaire et réglez le bloc sur « Drop ».
-
Le robot VR devra rouler en marche arrière sur une courte distance pour éviter de renverser ou d'entrer en collision avec des disques. Une collision avec un disque pourrait potentiellement faire dérailler le robot VR. Ajoutez les blocs suivants pour demander au robot VR de rouler en marche arrière sur 100 millimètres (mm) et de revenir à un cap de 0 degré.

- Ouvrez le Disk Mover Playground s'il n'est pas déjà ouvert et exécutez le projet.
-
Le robot VR avance, prend le premier disque, puis se tourne vers un cap de 180 degrés pour faire face à l'objectif bleu. Le robot VR utilise ensuite les valeurs du capteur de distance pour déterminer quand arrêter de conduire et laisser tomber le disque bleu.

- Remarquez comment le deuxième bloc [Repeat until] fonctionne dans cette partie du projet.
- Lorsque le capteur de distance sur le robot VR détecte que le mur de l'aire de jeu est à moins de 200 millimètres (mm), le projet passera au bloc suivant dans la pile sous le bloc [Répéter jusqu'à].
- Dans ce projet, cela signifiait que le robot VR arrêtait de conduire et laissait tomber l'électro-aimant dans l'objectif bleu.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.