
Manipulateurs Friction Grabber
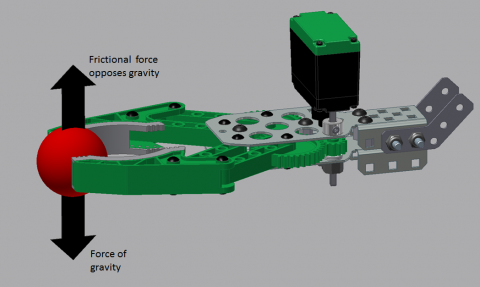
Les manipulateurs de préhension par frottement appliquent une force entre un objet et un tampon, puis comptent sur la force de frottement entre l'objet et le tampon pour manipuler l'objet.
La forme la plus courante de ce manipulateur est une griffe qui pince un objet. La griffe appuyant contre l'objet fournit la force, et le frottement entre la griffe et l'objet permet à l'objet d'être manipulé.